
Рефераты по сексологии
Рефераты по информатике программированию
Рефераты по биологии
Рефераты по экономике
Рефераты по москвоведению
Рефераты по экологии
Краткое содержание произведений
Рефераты по физкультуре и спорту
Топики по английскому языку
Рефераты по математике
Рефераты по музыке
Остальные рефераты
Рефераты по авиации и космонавтике
Рефераты по административному праву
Рефераты по безопасности жизнедеятельности
Рефераты по арбитражному процессу
Рефераты по архитектуре
Рефераты по астрономии
Рефераты по банковскому делу
Рефераты по биржевому делу
Рефераты по ботанике и сельскому хозяйству
Рефераты по бухгалтерскому учету и аудиту
Рефераты по валютным отношениям
Рефераты по ветеринарии
Рефераты для военной кафедры
Рефераты по географии
Рефераты по геодезии
Рефераты по геологии
Рефераты по геополитике
Рефераты по государству и праву
Рефераты по гражданскому праву и процессу
Рефераты по делопроизводству
Рефераты по кредитованию
Рефераты по естествознанию
Рефераты по истории техники
Рефераты по журналистике
Рефераты по зоологии
Рефераты по инвестициям
Рефераты по информатике
Исторические личности
Рефераты по кибернетике
Рефераты по коммуникации и связи
Учебное пособие: Дистанційний екологічний моніторинг
Учебное пособие: Дистанційний екологічний моніторинг
ДЕРЖАВНИЙ АГРОЕКОЛОГІЧНИЙ УНІВЕРСИТЕТ
ЕКОЛОГІЧНИЙ ФАКУЛЬТЕТ
Кафедра моніторингу
навколишнього природного
середовища
М.В. Зосімович
ДИСТАНЦІЙНИЙ ЕКОЛОГІЧНИЙ МОНІТОРИНГ
(для студентів, які навчаються за спеціальністю ,,Екологія та охорона навколишнього середовища”)
Методичний посібник
Житомир 2006
ББК
УДК 629.735; 656.7.07.6.015
Методичний посібник підготував:
к.т.н., доцент М.В. Зосімович.
Рецензенти:
доктор технічних наук, професор В.Ф. Манойлов (ЖДТУ);
доктор технічних наук, професор Л.В. Лось (ДАУ).
Методичний посібник розглянуто та рекомендовано до видання:
Кафедрою моніторингу навколишнього природного середовища, протокол № ____ від ____ ____ 2006 р.
Навчально-методичною комісією екологічного факультету, протокол № ____ від ____ ____ 2006 р.
ЗМІСТ
Вступ
І. ТИПИ КОСМІЧНИХ АПАРАТІВ ДЛЯ ДОСЛІДЖЕННЯ ЗЕМЛІ І ПЛАНЕТ
1.1 Науково-дослідні космічні апарати
1.2 Супутники зв’язку
1.3 Метеорологічн ШСЗ
1.4 Навігаційн ШСЗ
1.5 Геодезичн ШСЗ
1.6 Супутники для вивчення земних ресурсів
1.7 Космічн апарати для міжпланетних польотів
ІІ. АЕРОКОСМІЧНИЙ МОНІТОРИНГ ЕКОЛОГО-ГЕОЛОГІЧНОГО СЕРЕДОВИЩА
2.1 Космічна зйомка поверхні Землі
2.1.1 Основні типи зйомки
2.1.2 Космічна фотозйомка
2.1.3 Космічна сканерна зйомка
2.2 Космічн системи моніторингу
2.2.1 Багатоспектральна зйомка високого розрізнення
2.2.2 Система “Спот” та проект “Терс”
2.2.3 Формування системи моніторингу на базі сонячно-синхронних орбіт
2.2.4 Формування системи високого розрізнення для зйомки з інтервалом у декілька годин
2.3 Вплив хмарності. Єдина багатоцільова система
2.3.1 Специфіка космічної зйомки високого розрізнення
2.3.2. Ймовірна оцінка впливу хмарності
2.3.3 Результати розрахунків ймовірності зйомки
2.4 Досвід використання українсько-російського КА “Океан-О” для вирішення задач землекористування, природо охорони та раціонального використання природних ресурсів .
2.4.1. Космічний апарат “Океан-О”
2.4.2. Призначення КА “Океан-О”
2.4.3. Вимірювальна апаратура КА “Океан-О”
2.4.4. Характерні особливості роботи КА “Океан-О”
2.4.5. Інформаційні системи КА “Океан-О”
2.4.6. Схема організації наземного сегменту
2.5 Землекористування, природоохоронні та природоресурсні задачі
2.5.1 Роль космічної інформації у вирішенні задач землекористування та природоохорони
2.5.2 Дослідження урбанізованих та техногенно змінених територій з небезпечними геологічними процесами
2.5.3. Вивчення геодинамічних зон
2.5.4 Вивчення техногенних змін сучасних ландшафтів
2.5.5 Визначення фітосанітарного стану та пожежонебезпечності лісів на прикладі Зони відчуження ЧАЕС
2.5.6 Картування ділянок підвищеної природної пожежобезпечності
2.5.7 Вивчення рослинності
ІІІ. ЕКОЛОГІЯ КОСМОСУ
3.1 Ракетно-космічн комплекси
3.2 Фактори техногенного впливу космічного польоту на довкілля
3.3 Вплив ракетно-космічної техніки на озоновий шар Землі
3.4 Вплив пусків ракетоносіїв на іоносферу
3.5 Космічне сміття
3.6 Дистанційний агромоніторинг
3.6.1 Мета сучасної системи агромоніторингу
3.6.2 Недоліки існуючої системи збору інформації
3.6.3 Принципові можливості дистанційних методів агромоніторингу
3.6.4 Функціональне призначення галузевої системи комплексної обробки аерокосмічно та наземної інформації (ГІСКОАНІ)
3.6.5 Основні завдання системи дистанційного агромоніторингу
3.6.6 Призначення отриманої інформації
3.6.7 Вимоги до функціонування системи моніторингу
3.6.8 Спільні риси розроблених систем дистанційного агромоніторингу
3.6.9 Структура системи дистанційного агромоніторингу
3.6.10 Схема розташування і функціонування АКП і ТД
3.6.11 АКП і ТД на території України
3.6.12 Паспорт АКП та його структура
3.7 Вплив атмосфери на електромагнітне випромінювання
3.8 Системи дистанційного зондування Землі
3.8.1.
Реєстрація ![]() - випромінювання
- випромінювання
3.8.2. Фотографічні системи
3.8.3 Відеографічні системи
3.8.4 Багатоспектральні сканери
3.8.5 Теплові сенсори
3.8.6 Надвисокочастотні локатори
3.9 Лазерн системи
3.9.1 Лідар на основі зворотного розсіювання
3.9.2 Лідар на основі реєстрації диференційного поглинання
3.9.3 Допплерівський лідар
3.9.4 Лідар на основі реєстрації флуоресценції
3.9.5 Лідар на основі реєстрації комбінаційного розсіювання
3.9.6. Застосування дистанційного зондування в екології
ІV. ПИТАННЯ ДЛЯ КОНТРОЛЮ ЗНАНЬ
4.1 Питання з розділу І
4.2 Питання з розділу
4.3 Питання з розділу ІІІ
Скорочення
Література
Зміст
ВСТУП
Успішний розвиток та поширене використання космічних методів дослідження в геології та екології дозволяють говорити про новий науковий напрямок – космоекогеологія. Космічн знімки разом з матеріалами традиційних методів вивчення Землі дають космогеолог надійні дані для будови еколого-геологічних моделей територій, що досліджуються.
Довгострокова стратегія охорони та збереження природи, що розроблена за ініціативою вчених всього світу та підтримана в ООН, потребує рішучого переходу від пасивної реєстрації нищівних наслідків численних екологічних порушень та частих катастроф до їхнього своєчасного попередження і запобігання.
Прийнята міжнародна програма (на рівні Міністерства з Надзвичайних Ситуацій України) спільних дій, яка передбачає створення системи надійного та широкомасштабного моніторингу навколишнього природного середовища. Моніторинг має забезпечувати систематичне та оперативне (слідкування) спостереження за станом природного середовища з метою її контролю та управлінням правильним використанням усіма складовими.
Оцінка стану та прогноз зміни геологічного середовища мають досить важливе значення для виявлення погрози порушення екологічної рівноваги в природі, а також велике народногосподарське значення.
Припускається, що моніторинг ма здійснюватись на трьох ієрархічних рівнях:
регіональному;
детальному;
локальному.
Регіональний моніторинг повинен охоплювати цілі економічні райони та надавати загальне уявлення про характер, масштаби, інтенсивності різних геологічних процесів, збитки які вони наносять народногосподарським об’єктам та природному середовищу, ефективност захисних заходів, що використовуються тощо. В залежності від ступеню освоєння території та інших факторів він може здійснюватись в широкому діапазон масштабів від 1:100 000 до 1:500000.
Детальний та локальний моніторинг повинен давати вже більш повне уявлення про розвиток екологічних процесів в межах окремих інженерних комплексів та споруд або їхніх комплексів. Обрання методів, що використовуються під час моніторингу, визначається його рівнем. Під час регіонального моніторингу за базові доцільно використовувати аерокосмічні методи, доповнюючи їх невеликим об’ємом наземних досліджень. Під час детального та локального моніторингу основні дані будуть одержані наземними дослідженнями, а аерокосмічні методи стануть їхнім істотним доповненням.
Провідна роль в реалізац аерокосмічного моніторингу має належати знімкам, що виконуються в оптичному діапазоні спектру через їхній максимум корисної інформації.
I. ТИПИ КОСМІЧНИХ АПАРАТІВ ДЛЯ ДОСЛІДЖЕННЯ ЗЕМЛІ І ПЛАНЕТ
1.1 Науково-дослідні космічні апарати
Науково-дослідні космічні апарата (КА) призначені для досліджень навколоземного та міжпланетного космічного простору, Місяця і планет Сонячної системи, з метою проведення різноманітних експериментів досліджень в космічному просторі наукового та прикладного значення, а також для опрацювання конструкції окремих систем, вузлів та апаратури нових КА (наприклад, нових систем орієнтації, керування, стиковки, посадки тощо). Науково-дослідні КА за призначенням можуть бути пілотованими та автоматичними.
До пілотованих науково-дослідних КА відносять:
а) орбітальні кораблі (ОК), орбітальні лабораторії (ОЛ), орбітальні пілотовані станції (ОПС) та орбітальн бази-станції (ОБС), що призначені для вивчення навколоземного космічного простору;
б) міжпланетні космічні корабл (КК) і станції, що призначені для вивчення космічного простору, Місяця і планет Сонячної системи.
До автоматичних науково-дослідних КА відносять:
а) штучні супутники Землі (ШСЗ), автоматичн орбітальні лабораторії, орбітальні станції (ОС), які призначені для вивчення верхніх шарів атмосфери та навколоземного космічного простору;
б) автоматичні міжпланетні станц (АМС), штучні супутники Місяця, Сонця (ШСС) та планет, посадочні модул планетоходи станцій, що призначені для вивчення космічного простору та планет Сонячної системи (рис.1.1).
1.2 Супутники зв'язку
Супутники зв'язку класифікують за принципом роботи (активні, пасивні), типом орбіти, видом ліній зв'язку та їх кількості.
Активні ШСЗ використовують ретранслятори, які включають бортові приймачі та передавач (із власними антенними системами), що працюють на різних частотах. Вони приймають сигнали наземної станції, підсилюють їх, здійснюють перетворення частоти і ретрансляцію на іншу наземну станцію. Відомі дві різновидності передач прийнятої інформації з борту активних ШСЗ: безпосередня передача інформації без запам’ятовування та передача з затримкою інформації, що запам’ятовується на борту.
Рис. 1.1. Вигляд Земл з космосу
Пасивні ШСЗ представляють собою прості відбивачі сигналів, що випромінюють наземні станц (без підсилювання та перетворення). Відомі три види пасивних ШСЗ зв’язку:
сферичні відбивачі;
відбивачі у вигляді хмар або глобальних поясів із металевих диполів, розсіяних на певних висотах;
пласкі або лінзоподібні відбивачі.
Визначено два основні напрямки створення орбітальних супутникових систем зв’язку:
системи ШСЗ, що обертаються за еліптичними орбітами з великим ексцентриситетом;
системи ШСЗ, що обертаються за стаціонарними та синхронними орбітами.
Системи ШСЗ, що обертаються за еліптичними орбітами з великим ексцентриситетом, дозволяють забезпечити протягом тривалого часу за допомогою одного ШСЗ-ретранслятора безперервний зв’язок поміж віддаленими пунктами.
Враховуючи ймовірність виходу з ладу супутників, слід передбачити необхідність періодичного виведення на орбіту нових ШСЗ на заміну тих, що вже не функціональні. Середній час поміж запусками становить
 (1.1)
(1.1)
де ![]() -
середній термін безвідмовної роботи КА (враховуються лише випадкові відмови);
-
середній термін безвідмовної роботи КА (враховуються лише випадкові відмови); ![]() - кількість ШСЗ, що запускаються
однією ракетою-носієм (РН);
- кількість ШСЗ, що запускаються
однією ракетою-носієм (РН); ![]() -
середня кількість ШСЗ, що функціонує;
-
середня кількість ШСЗ, що функціонує; ![]() -
ймовірність успішного запуску;
-
ймовірність успішного запуску; ![]() -
ймовірність успішного виведення на орбіту та увімкнення апаратури;
-
ймовірність успішного виведення на орбіту та увімкнення апаратури; ![]() - термін експлуатац
сонячних батарей.
- термін експлуатац
сонячних батарей.
До складу системи зв’язку окрім орбітальної системи супутників (будь-якого з типів, перелічених вище) входять приймально-передаючі станції з антенними системами і телеметрична система контролю параметрів бортової апаратури. До складу системи зв’язку з орбітами, що коректуються, входить також командна радіолінія.
У системах на базі активних ШСЗ зв’язку можуть використовуватися нестабілізовані супутники (із повною ізотропною діаграмою направлення антени), стабілізовані обертанням (зазвичай мають механічний пристрій проти обертання антенного блоку), повністю стабілізован ШСЗ із незмінною орієнтацією діаграми направлення антени (по відношенню до Землі) та сонячних батарей (відносно Сонця), наприклад ШСЗ зв’язку «Молния» (Росія).
Розрахунковий термін активного снування супутників зв’язку 5-7 років.
1.3 Метеорологічні ШСЗ
Метеорологічні ШСЗ (метеосупутники) призначені для регулярного передавання телевізійних зображень хмарового та льодового покривів Землі на наземні станції.
На ШСЗ також встановлюють датчики радіаційних випромінювань Землі та хмарового покриву, які працюють у різних діапазонах частот, а інші прилади – для аналізу метеорологічних умов. Одержана від метеосупутників інформація використовується для аналізу атмосферних процесів та прогнозів погоди.
За телевізійними та інфрачервоними (ІЧ) знімками освітленої та тіньової сторін Землі здійснюють нефаналіз хмарності (визначення її форм, структури та кількості, див. рис.1.2). Ця та інша інформація, що одержана з метеосупутників, дозволяє складати оперативні екологічні карти хмарового, льодового та снігового покривів, виявляти зародження ураганів і визначати напрямок й швидкість їх розповсюдження, розрізняти тип й етапи розвитку погодних умов, виявляти струйні потоки в атмосфері, місцеві метеорологічн явища (шквали, грозову активність тощо), досліджувати тепловий баланс Землі, визначати температуру хмарового покриву, поверхні суходолу й океану.

Рис. 1.2. Хмарність Землі з орбіти
У зв’язку із специфікою вимог до метеоспостережень для глобального прогнозування та регіонального аналізу припускаються дві системи метеорологічних спостережень з використанням супутників:
з централізованою обробкою даних (глобальне прогнозування);
з автономним використанням даних (регіональна оцінка й прогноз).
Централізована система (рис. 1.3) забезпечує одержання моментальних телевізійних зображень хмарового покриву, які послідовно охоплюють усі ділянки поверхні Землі, над якими проходять орбіти метеосупутників. Зображення запам’ятовуються в бортовому комп’ютері ШСЗ та зберігаються до моменту входження його у зону зв’язку з наземною станцією приймання даних та управління ШСЗ, після чого, за командами з Землі, починається передача усіх зображень, що одержано за один оберт ШСЗ відносно Землі.
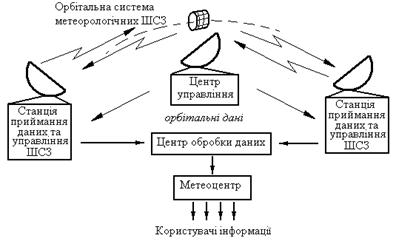
Рис.1.3. Блок-схема централізованої системи метеоспостережень з використанням ШСЗ
Автономна система на відміну від централізованої не має на борту ШСЗ бортових пристроїв запам’ятовування даних. Зображення із спеціального відікону (телевізійної передаючої трубки), який тимчасово зберігає його, передається автоматично на автономні наземні станції приймання даних (рис. 1.4). Автономна система дозволяє забезпечити метеоданими, практично без затримки, досить великі географічні райони. Для одержання від ШСЗ нформації про метеоумови у будь-якому районі необхідна приймальна станція, що устаткована апаратурою реєстрації (одержання фото- і відео- зображень) телеінформації. Для одержання зображення кожного району Землі, регулярно у полудень (на цей час райони спостереження добре освітлені) бажано використовувати так зван сонячно-синхронні орбіти, площина яких обертається (прецесія орбіти) синхронно із обертанням Землі навколо Сонця у східному напрямку. Орбітальна площина супутника має бути компланарною з напрямком Земля – Сонце. Необхідну швидкість прецесії забезпечують під час запуску обранням відповідного кута нахилення площини орбіти до екватору.
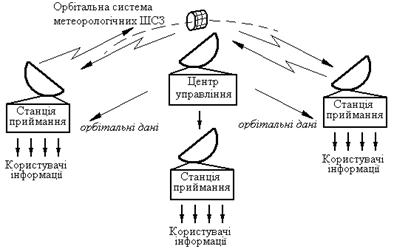
Рис.1.4. Блок-схема автономної системи метеоспостережень з використанням ШСЗ
В першому наближенні швидкість прецесії висхідного вузла орбіти (рад/с) визначається за формулою:
де ![]() -
екваторіальний радіус Землі (6378,245 км);
-
екваторіальний радіус Землі (6378,245 км); ![]() - кут нахилу орбіти від
екватору (градус);
- кут нахилу орбіти від
екватору (градус); ![]() - найвіддаленіша
точка орбіти від центру Землі (км);
- найвіддаленіша
точка орбіти від центру Землі (км); ![]() -
найближча точка орбіти від центру Землі (км).
-
найближча точка орбіти від центру Землі (км).
Отже, для сонячно-синхронної орбіти кут нахилу (рад) буде становити:
![]()
Так як прецесія в східному напрямку
має додатний знак (+), то кут ![]()
З метою спрощення обробки одержаних зображень та зберігання незмінних характеристик розрізнювальної здатност зображень на знімках доцільні кругові та наближені до них орбіти. Для фіксування швидкоплинних атмосферних явищ (вихорових шквалів, грозових областей тощо, див. рис. 1.5), особливо частих в низьких широтах, найпридатніші кругов орбіти.
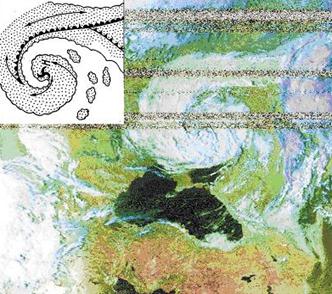
Рис. 1.5. Циклон над територією України
Найдоцільнішими вважають системи, що складаються з чотирьох та шести метеосупутників, що обертаються на полярних кругових орбітах висотою 600 – 2000 км від усередненої земної поверхні, розташован так, щоб супутники одночасно знаходилися риблизно на одній широті (орбіти рознесені по довготі).
Зону ефективного
зв’язку можна оцінювати величиною дуги ![]() геоцентричного кола (рис.
1.6-1.7). Якщо проекція траєкторії
геоцентричного кола (рис.
1.6-1.7). Якщо проекція траєкторії
ШСЗ на Землю проходить на відстан
від станції, не меншій за ![]() при
будь-якій орієнтації орбіти відносно точки стояння станції на даному оберт
буде можлива передача від супутника протягом часу, не меншим за встановлену
тривалість сеансу
при
будь-якій орієнтації орбіти відносно точки стояння станції на даному оберт
буде можлива передача від супутника протягом часу, не меншим за встановлену
тривалість сеансу ![]() , і при цьому кут
підняття антени не буде меншим за допустимий
, і при цьому кут
підняття антени не буде меншим за допустимий ![]() Як
видно з рис. 1.6, відстань проекції траєкторії на Землю визначається як:
Як
видно з рис. 1.6, відстань проекції траєкторії на Землю визначається як:
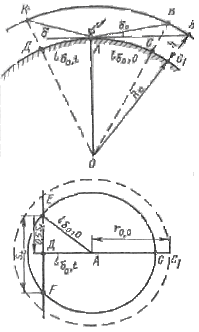
Рис.1.6. Схема визначення зони ефективного зв’язку наземного пункту з ШСЗ
![]()
![]()
де ![]() -
дугова курсова відстань (дуга геоцентричного кола), що відповідає находженню
ШСЗ в зоні видимості станції протягом часу
-
дугова курсова відстань (дуга геоцентричного кола), що відповідає находженню
ШСЗ в зоні видимості станції протягом часу ![]() (
(![]() де
де ![]() - період обертання ШСЗ);
- період обертання ШСЗ); ![]() - радіус Землі;
- радіус Землі; ![]() - висота орбіти.
- висота орбіти.
Якщо ![]() зв’язок
станції з ШСЗ буде можливий на кожному витку. Якщо величина
зв’язок
станції з ШСЗ буде можливий на кожному витку. Якщо величина ![]() не задовольняє цій умові,
то частота проходження ШСЗ повз зону ефективного зв’язку (при
не задовольняє цій умові,
то частота проходження ШСЗ повз зону ефективного зв’язку (при ![]() )
)
![]()
При ![]() та
та
![]() Значення
параметрів будуть:
Значення
параметрів будуть:
![]()
![]()
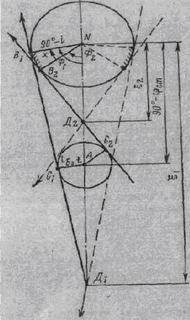
Рис. 1.7. Схема для
визначення частоти сеансів зв’язку наземного пункту з ШСЗ: ![]()
![]() -
проекції траєкторій ШСЗ на земну поверхню;
-
проекції траєкторій ШСЗ на земну поверхню; ![]() -
точка стояння станції;
-
точка стояння станції; ![]() - північний полюс
(
- північний полюс
(![]()
![]()
![]()
![]() )
)
Система метеорологічних ШСЗ може виконувати також завдання по збору і передачі до єдиного центру метеорологічних даних від окремих морських та повітряних метеостанцій.
Російські супутники космічно метеорологічної системи ”Метеор’’ забезпечують одержання комплексно метеоінформації: телевізійної, інфрачервоної, актинометричної з освітленого та тіньового боків Землі (табл. 1.1).
Метеорологічні супутники SMS (США)
призначені для зйомки хмарового покриву в денний та нічний часи із стаціонарно
орбіти (![]() сх.д.), а також для
ретрансляції метеорологічної інформації. Вони передають космічні знімки
хмарового покриву кожні 30 хвилин.
сх.д.), а також для
ретрансляції метеорологічної інформації. Вони передають космічні знімки
хмарового покриву кожні 30 хвилин.
Таблиця 1.1
Основні дані російських метеорологічних ШСЗ системи ,,Метеор”
| Тип орбіти | Кругова навколополярна |
| Висота орбіти, км | 625 - 630 |
| Склад метеорологічного устаткування | Телевізійна (ТВ) (дв камери). Інфрачервона (ІЧ) телевізійного типу (в діапазоні хвиль 8-12 мкм). Актинометрична (АК) – радіометри (по 2 скануючі вузькосеторні та нескануюч широко секторні прилади) |
|
Ширина смуги захоплення (на місцевості), км: ТВ апаратурою ІЧ апаратурою АК апаратурою |
1000 1000 2500 |
|
Просторове розрізнення (у надірі), км: ТВ зображень ІЧ зображень АК зображень |
1,25 Х 1,25 15 Х 15 50 Х 50 |
|
Чуттєвість до
температурних перепадів ІЧ апаратури, |
2-3 при додатних 7-8 при від’ємних температурах |
| Джерело живлення | Сонячні та хімічн батареї |
1.4 Навігаційні ШСЗ
Орбітальна система з навігаційних ШСЗ, що розроблена у США, в сукупності з наземною системою забезпечення та бортовою апаратурою об’єктів, що визначаються у наш час використовується для встановлення місця об’єкта в заданій системі координат у будь-який час доби, за будь-яких метеоумов та необмеженій пропускній здатності. За опорну радіонавігаційну величину (орієнтир з відомими координатами на даний момент часу) використовується задана у часі й просторі з певною точністю траєкторія руху супутника. Траєкторія ШСЗ в часі задається ефемеридами, що періодично обновлюються у системі єдиного часу. Значення ефемерид вводяться разом із сигналами точного часу від бортового датчика. Траєкторії руху ШСЗ також можна обирати із спеціальних каталогів, подібних до астрономічних для ефемерид.
В залежності від методів вимірювання параметрів, що характеризують відносне положення ШСЗ та об’єкта, що визначається, розрізняють декілька способів визначення місцеположення об’єкта:
дальномірний;
кутомірний;
дальномірно-кутомірний;
доплеровський.
Перші три способи через малу точність вимірювань практично не використовуються.
В допплерівських системах для
визначення величини зміщення![]() точки
стояння об'єкта відносно сліду траєкторії супутника на земній поверхні -
курсового параметра ШСЗ (рис. 1.8) - використовуються вимірювання
допплерівського зсуву частоти
точки
стояння об'єкта відносно сліду траєкторії супутника на земній поверхні -
курсового параметра ШСЗ (рис. 1.8) - використовуються вимірювання
допплерівського зсуву частоти ![]() сигналів,
що випромінюються бортовим передавачем:
сигналів,
що випромінюються бортовим передавачем:
![]()
де ![]() -
радіальна складова швидкості ШСЗ;
-
радіальна складова швидкості ШСЗ; ![]() -
швидкість світла.
-
швидкість світла.
Для визначення координат точки
стояння об'єкта достатньо визначити величину курсового параметра ![]() супутника, текуч
координати і параметри руху якого відомі на момент проходження точки
супутника, текуч
координати і параметри руху якого відомі на момент проходження точки ![]() .
.
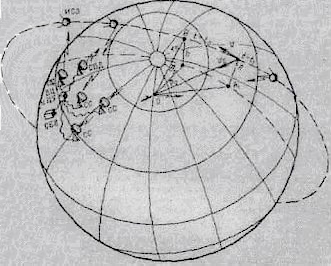
Рис.1.8. Схема побудови
навігаційної системи з використанням ШСЗ: О
об’єкт, що визначається; СС – станція супроводження ШСЗ; СВД – станція
введення даних; СЕВ – станція еталонної частоти та єдиного часу; ВЦ та ЦУ
обчислювальний центр та центр управління; ![]() -
курсовий параметр ШСЗ;
-
курсовий параметр ШСЗ; ![]() - радіальна
складова ШСЗ
- радіальна
складова ШСЗ
Якщо прийняти, що ділянка АВ
траєкторії ШСЗ прямолінійна і лінійна швидкість супутника ![]() на цій ділянці стала, то в
кожний момент часу
на цій ділянці стала, то в
кожний момент часу ![]()
де ![]() -
момент часу проходження ШСЗ курсового параметра (
-
момент часу проходження ШСЗ курсового параметра (![]() ).
).
Для точності навігації необхідно враховувати також рефракцію радіохвиль в іоносфері. У зв'язку з цим допплерівський зсув вимірюється не менше ніж на двох частотах. За характеристиками розповсюдження радіохвиль на двох сполучених частотах визначається поправка на рефракцію.
Допплерівська система, яка пасивною, забезпечує необмежену пропускну здатність.
Характеристики орбітальної системи навігаційних ШСЗ зумовлюються необхідною максимальною частотою визначення місця положення об'єкту, заданим часом активного існування ШСЗ, можливостями встановлення зв'язку між об'єктом, що визначається та ШСЗ (характеристиками радіотехнічної апаратури, енергетичними ресурсами на борту ).
Для навігаційних ШСЗ найбільш бажані полярні кругові орбіти, через те, що вони охоплюють усю поверхню Землі, розрізняються більшою стабільністю, для них простіше ніж для еліптичних розраховувати ефемериди та враховувати вплив збурюючих дій. Висота орбіти зазвичай близько 1000 км. Для, визначення об'єктом у довільній точці Землі свого місцеположення) в орбітальній системі координат не рідше ніж через кожн 100-120 хвилин мають бути не менше чотирьох супутників, які обертаються по круговим полярним орбітам. Площини орбіт (висхідні вузли) в просторі мають бути рознесені на 45°. При цьому вважається, що з кожним супутником об'єкт, що визначається, може підтримувати зв'язок на двох-трьох сусідніх витках (у межах видимості).
1.5 Геодезичні ШСЗ
Геодезичні ШСЗ призначені для вирішення геометричних та динамічних (фізичних) задач геодезії.
Геометричні задач зводяться до визначення положення точок на земній поверхні та встановлення точних геодезичних зв’язків поміж континентами та відособленими об'єктами (наприклад, островами) з метою приведення їх до єдиної системи координат, прив'язки з високою точністю окремих пунктів до мережі тріангуляції (створення глобально геодезичної мережі та її ущільнення), визначення точних координат окремих пунктів на земній поверхні, забезпечення картографування.
Динамічні задач приводяться до уточнення форми, розмірів і гравітаційного поля Землі, встановлення її справжньої форми, визначення потенціалів гравітаційного поля та гравітаційних аномалій, а також встановлення законів їхніх змін. Так, за допомогою обробки орбітальних вимірювань у наш час визначено коефіцієнта при членах розкладення у ряд гравітаційного потенціалу Землі до 14 – го порядка.
Спеціальні геодезичні ШСЗ використовуються як опорні точки, тобто точки з точно відомими на даний момент координатами. У залежності від методу задавання координат текучого місця положення ШСЗ розрізняють два способи розв’язання геометричних задач. При першому способі використовуються дані точного прогнозування орбіт ШСЗ (як це робиться під час навігаційних визначень з використанням ШСЗ); при другому способі координати текучого місця положення ШСЗ визначаються вимірюваннями з декількох наземних пунктів (кутомірних або дальномірних), координати яких відомі. Перший спосіб дозволяє провести геодезичну прив’язку будь-яких пунктів, устаткованих необхідним обладнанням. Однак досягнуті в наш час точност прогнозування орбіт (декілька десятків метрів) усе ще не придатні для геодезії. На практиці використовується другий спосіб, який може використовуватися для взаємної прив’язки пунктів, відносно яких супутник протягом визначеного часу знаходиться одночасно в зоні видимості. Цей спосіб можна реалізувати на баз використання оптичних кутомірних та радіотехнічних (дальномірних, допплерівських кутомірно-дальномірних) систем для вимірювання місцеположення ШСЗ з наземних пунктів.
Для оптичних кутомірних вимірювань місця положення ШСЗ супутники устатковуються бортовими імпульсними джерелами світла (оптичними маяками) або використовуються для відбиття сигналів оптичних квантових генераторів наземних станцій. З метою забезпечення високої точност кутомірних вимірювань (±1-2") на наземних пунктах використовуються спеціальні високоточні фототеодолітні установки з наступною обробкою компаратором отриманих фотографічних зображень ШСЗ на фоні зірок. Висока точність забезпечується також фіксацією часу вимірювань, який
задається бортовим еталоном. Сигнали єдиного часу передаються по радіолініям орбітальних вимірювань.
В радіотехнічних далекомірних системах використовуються радіолокаційні вимірювання дальності з декількох сполучених пунктів, для чого на борту геодезичного ШСЗ встановлюється до чотирьох приймачів та передавачів (згідно кількості сполучених пунктів), які працюють на різних частотах. Як і при кутомірних методах, моменти вимірювань фіксуються в часі за сигналами бортового еталону часу.
Орбіти геодезичних ШСЗ мають бути наближеними до кругових на висоті 1000-1400 км (ШСЗ з оптичним маяком) або кругові на висоті близько 1000 км (ШСЗ з радіотехнічною апаратурою для далекомірних вимірювань).
1.6 Супутники для вивчення земних ресурсів
Основні області використання КА для розвідки земних ресурсів - це збір різноманітних океанографічних даних, моніторинг сільськогосподарських культур та лісових масивів, геологічна розвідка, вимірювання товщини снігового покриву та спостереження за пересуванням льодовиків, оцінка земельних ділянок в інтересах землекористування, оцінка якості води, теплове і топографічне картування місцевості, збір даних для прогнозування стихійного лиха (наприклад, землетрусів, повеней, лісових пожеж, див. табл. 1.2-1.3, рис. 1.9-1.11).
Таблиця 1.2
Основні технічн характеристики КА "Фрам"
|
Розрізнення на місцевост з висоти 200км, ум. од.: на чорно-білій плівці на спектрозональній плівці |
20...ЗО ЗО...50 |
| Ширина смуги фотографування з висоти 200 км, км | 180 |
|
Площа фотографування з висоти 200км, км2 |
17 млн |
|
Робочі орбіти: мінімальна висота, км максимальна висота, км |
210...229 255...275 |
| Діапазон широт моніторингу | 82 півд.ш. ...82зах.ш. |
| Запас характеристичної швидкості, м/с | 42 |
| Час існування, діб | до 13 |
| Маса КА, кг | до 6100 |
| Тип ракети-носія | "Союз" |
В основу використання КА для вивчення земних ресурсів покладена наступна фізична властивість: будь-яка речовина поглинає, випромінює, розсіює або відбиває (повністю або частково) електромагнітну енергію і характеризується властивою їй сигнатурою, яка пов'язана з довжиною хвилі та молекулярною будовою речовини. Дякуючи цьому можливе дистанційне вимірювання за допомогою широкого класу приладів, як можуть визначити (відшукати та зареєструвати) сигнатуру речовини без безпосереднього контакту з ним.
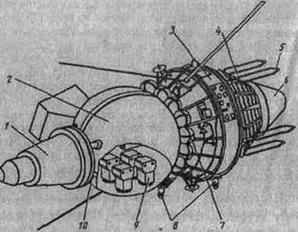
Рис.1.9. Загальний вигляд КА "Фрам" (Росія): 1 - комплексна рушійна установка; 2 - спускний апарат; 3 – відсік приладів; 4 - жалюзі системи терморегулювання; 5 - антени командно-програмно-траєкторної радіолінії; 6 - порохова гальмівна рушійна установка; 7 - кульовий балон з азотом системи виконавчих органів; 8 - чуттєві елементи системи керування рухом; 9 - фотокомплекс для багатозональної зйомки земної поверхні; 10 - уніфікована система відділення
Найбільш ефективними для польотів КА з метою вивчення земних ресурсів вважаються сонячно-синхронні кругові орбіти на висотах 500-900 км.
До складу наземного комплексу входять: станція супроводження, пункти збору інформації (яка передається безпосередньо або ретранслюється через супутники зв'язку), центр управління та центр обробки інформації. Обробка даних включає декодування, нормалізацію, трансформування, прив'язку до місцевості, вилучення інформації, індексацію, архівацію та збереження.
Таблиця 13
Основні технічн характеристики КА "Ресурс-Ф2"
|
Розрізнення на місцевості з висоти 200км, ум. од.: на чорно-білій плівці на спектрозональній плівці |
9...12 15...18 |
| Ширина смуги фотографування з висоти 250 км, км | 150 |
|
Площа фотографування з висоти 250 км, км2 |
20,7 млн |
|
Фотометрична точність знімків, %: абсолютна |
15 |
| відносна між каналами | 5 |
| Число спектральних діапазонів | 4 Х 6 |
|
Робочі орбіти: висота кругово орбіти |
210...450 |
|
Висота еліптично орбіти, км: мінімальна |
170...250 |
| максимальна | 250...400 |
| Діапазон широт моніторингу | 82півд.ш....82зах.ш. |
| Нахил площини орбіти, град | 62,8... 82,6 |
| Час існування, діб | до 30 |
| Маса КА, кг | до 6450 |
| Тип ракети-носія | "Союз" |
Рис. 1.10. Загальний вигляд КА "Ресурс-Ф2" (Росія): 1 - комплексна рушійна установка; 2 - підвісний відсік; З – спускний апарат: 4 - приладний відсік; 5 - жалюзі системи терморегулювання; 6 - антени командно-програмно-траєкторної радіолінії; 7 - порохова гальмівна рушійна установка; 8 - кульовий балон з азотом системи виконавчих органів; 9 - чуттєв елементи системи керування рухом; 10 - бленда зоряного апарата; 11 -чотирьох канальна апаратура для багатозональної зйомки земної поверхні; 12 - сонячна батарея
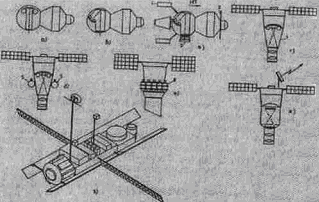
Рис.1.11. Схема еволюції КА моніторингу для дослідження природних ресурсів Землі: а - КА з фотоапаратурою без зламу оптичної осі; б - КА, які устатковані довго фокусною апаратурою із зламом оптичної осі; в - низькоорбітальний КА моніторингу з аеродинамічними компенсаторами 1 та теплозахисним екраном 2, тепловою блендою 3; г - КА, у якого корпус СА 4 виготовлений як корпус фотоапарата; д - КА з капсулами 5 для оперативної доставки фотоплівки на Землю; є - КА з капсульним автоматом 6; ж - оптико-електронний КА моніторингу; з - комплексний КА моніторингу
1.7 Космічні апарати для міжпланетних польотів
Конструкція міжпланетних КА відрізняється рядом особливостей, які пов'язані з тривалою дією факторів космічного простору. Це враховується підбором спеціальних матеріалів, герметизацією окремих вузлів, використанням спеціальних покривів, максимально стійких по відношенню до метеорної ерозії, спеціального антимеоритного захисту (на КК).
Орбітальні та міжпланетні станц складаються з наступних основних частин: відсіку приладів, блоку баків рушійно установки (РУ), коректую чого двигуна з вузлами автоматики, сонячні батареї, антенно-фідерного обладнання, радіаторів системи терморегулювання.
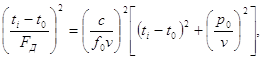
Для автоматичних міжпланетних станцій (АМС) серій "Зонд", "Марс", "Венера" (рис.1.12-1.13) характерні наступні режими роботи: тривала орієнтація робочих поверхонь сонячних батарей на Сонце, точна орієнтація відносно небесних орієнтирів перед корекцією траєкторії, орієнтація параболічної антени на Землю для встановлення інформативного зв'язку, стабілізація під час роботи коректуючої РУ.
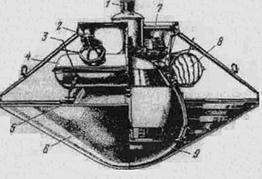
Рис.1.12. СА "Марс-6" (праворуч - розріз): 1 - двигун відведення СА; 2 - двигун введення в дію витяжного парашута; 3 - антени зв'язку з станцією на орбіті; 4 - парашутний контейнер; 5 - антена радіовисотоміра; 6 - аеродинамічний гальмівний конус; 7 - прилади та апаратура системи автоматичного управління; 8 - основний парашут; 9 - автоматична марсіанська станція
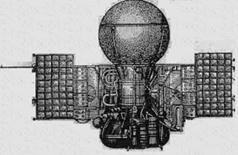
Рис.1.13. Загальний вигляд АМС "Венера-9" ("Венера-10") до відокремлення шароподібного СА від орбітального апарату

Рис.1.14.Спускний апарат станції “Венера-9” (“Венера-10”): 1 - спіральна антена; 2 - аеродинамічний гальмівний пристрій; 3 - корпус з контейнером приладів; 4 - еластичний посадочний пристрій; 5 - прожектори (не знадобились)

Рис.1.15. Ракета Місяць-Земля” (“Луна-16”)
Під час проектування системи управління для міжпланетних КА необхідно враховувати деякі особливості міжпланетного перельоту. До них відносяться:
• точність наведення КА на ціль в момент виходу з траєкторії пасивного польоту;

Рис. 1.16. Астронавт Е. Олдрин на Місяці
• наявність перехідної орбіти та проходження її через різні області космічного простору, внаслідок чого елементи орбіти отримують збурення і змінюються;
• необхідність корекції на ділянц пасивного польоту через великі міжпланетні відстані, неминучих похибок під час виведення КА на орбіту та уточнення астрономічних сталих;
• необхідність використання на КА спеціальних (інфрачервоних або радарних) систем наведення для корекції та управління на проміжній та кінцевій ділянках траєкторії польоту, а також використання бортового комп'ютера для попередніх обчислень параметрів траєкторії КА;
• наявність системи життєзабезпечення (рис.1.16);
• необхідність пристосовувати міжпланетн траєкторії до умов радіозв'язку в момент зближення з об'єктом дослідження (планетою, астероїдом, кометою тощо), ускладнення системи космічного зв'язку через необхідність підтримки зв'язку з КК під час висадки космічної експедиц на Місяць (рис.1.17) та інші небесні тіла, коли КК лишається на планетоцентричній орбіті;
• зазначений термін перебування на небесних об'єктах (він не може бути доцільним), бо старт в бік Землі доступний лише при сприятливому положенні Землі та об'єкта відносно Сонця.
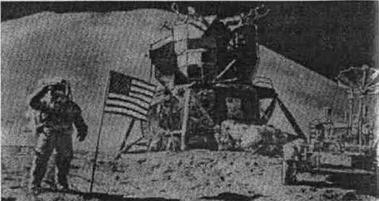
Рис. 1.17. Дж. Ірвін біля КК ”Аполлон-15” на поверхні Місяця
Особливості навігації міжпланетних КА полягають:
• в значній протяжності каналів передачі сигналів, що потребує великих потужностей передавачів, високої чутливост приймачів, приймання просторової та частотної селекції і в зв'язку з цим підвищення значення природних навігаційних точок з необмеженими запасами енергії (Сонце, зорі);
• в підсиленні автономного характеру роботи КА, що визначає спрямованість до використання методів самовизначення;
• у зростанні значущості оператора та його кваліфікації в зв'язку з підвищенням ролі автономних навігаційних визначень;
• в обмеженості енергоресурсу (тому траєкторію польоту обирають з умов мінімуму витрат енергії та найкращого використання гравітаційного поля Сонця і планет);
• у необхідності проведення вимірювань на міжпланетних трасах на всій траєкторії з максимально можливою точністю (при цьому особливо відповідальні вимірювання перед включенням РУ для корекц траєкторії або для виконання тривалого маневру. Міжпланетний політ відрізняється від навколопланетного також і можливим складом змінних параметрів. Не використовуються вимірювання висоти, різниці відстаней до двох поверхонь навігаційних точок (НТ) або швидкості вимірювання такої різниці відстаней. Вимірювати на борту відстані та радіальні швидкості відносно планетних НТ неможливо, у цьому разі приймально-вимірювальна частина апаратури ускладнюється в порівнянні з бортовими засобами навколоземних КК.
ІІ. АЕРОКОСМІЧНИЙ МОНІТОРИНГ ЕКОЛОГО-ГЕОЛОГІЧНОГО СЕРЕДОВИЩА
2.1 Космічна зйомка поверхні Землі
2.1.1 Основні типи зйомки
Будь-яка зйомка – це реєстрація яскравості поверхні Землі в певному діапазоні спектра електромагнітних хвиль, до того ж в діапазоні, для якого атмосфера досить прозора.
Гама- та рентгенівські промені не відбиваються і слабо випромінюються поверхнею Землі: ультрафіолетове (УФ) світло та більшість спектру довжин хвиль інфрачервоного (ІЧ) випромінювання атмосфера Землі практично не пропускає; радіохвилі, за виключенням найкоротших, не утворюють направленого випромінювання. Внаслідок цього можлив лише наступні варіанти зйомок Землі з космосу:
Реєстрація сонячного світла, відбитого від поверхні Землі в видимій області спектру (0,5...0,7 мкм) та в вікнах прозорості” атмосфери ближнього ІЧ-діапазону (0,7...3 мкм). Космічн знімки у діапазонах цих частот у подальшому будемо називати зйомками в оптичному діапазоні спектра.
Зйомка власного ІЧ-теплового та радіотеплового випромінювання Землі, головним чином ІЧ-теплова зйомка в зон довжин хвиль 9...12 мкм та радіотеплова зйомка в мікрохвильовому діапазон радіохвиль, що включає міліметрові та сантиметрові хвилі.
Активні методи дистанційного зондування, тобто реєстрація сигналів, відбитих від поверхні Землі та тих, що генеруються штучним джерелом направленого випромінювання, яке розташоване на борту КА. Це або лазерна, або радіотеплова зйомка.
Практично лазерна зйомка, й лише з літаків, а не з КА, тільки починає розвиватись. Що до радіолокаційно зйомки, то в класичному варіанті вона має суттєве обмеження: реєстрація здійснюється в діапазоні, довжини хвиль на декілька порядків більші в порівнянн з видимим світлом, і тому просторове розрізнення радіолокаційних знімків відносно досить низьке. Ці ускладнення вдалося подолати за рахунок створення так званих радіолокаційних станцій (РЛС) з синтезованою апертурою. Основна перевага зйомки за допомогою РЛС з синтезованою апертурою – можливість її здійснення в будь-який час доби та незалежно від наявності хмарності.
2.1.2 Космічна фотозйомка
Основний вид космічних зйомок - це фотографування поверхні Землі за допомогою спеціалізованих народногосподарських супутників серії “Космос”, “Фотон”, “Фрам” (Росія), “Січ”, “Океан-0” (Україна) із середньою висотою ≈250 км. Вони устатковані декількома фотокамерами з різними фокусними відстанями та здійснюють космічну фотозйомку в різних масштабах.
Великомасштабні знімки мають високу фотографічну якість та витримують, без істотного зменшення різкості, збільшення до мірил 1:100 000...1:25 000 із смугою огляду на поверхн Землі 100...300 км. Розрізнення на місцевості досягає 5 м.
Кожний із супутників функціону приблизно 2 тижні, після чого відзнята плівка повертається на Землю для фотохімічної обробки та репродуціювання.
Фотозйомка з борту пілотованих ОС поступається космічній зйомці з КА “Космос”. Це пов’язано з тим, що ОС за умов радіаційної безпеки виводять на орбіти з нахилом 51...520 до земного екватору. Космічна фотозйомка з борту ОС проводиться у мірилах порядку 1:3000 000 та менших.
Недоліки космічної фотозйомки
Основна мета аерокосмічного моніторингу еколого-геологічного середовища – оперативне вироблення оптимальної реакції на її стан та зміни (а від замовлення на космічну фотозйомку до передачі знімків замовнику проходить кілька місяців).
В існуючих варіантах космічна фотозйомка недостатньо оперативна не лише для моніторингу, але і для цілей дистанційного зондування внаслідок обмеженої кількості запусків відповідних супутників та короткостроковості дії кожного з них. Знімки деяких ділянок не можливо одержати навіть протягом декількох років.
Повторні космічні фотознімки певних ділянок, якщо і можливі, то в різних умовах освітлення та в різні пори року, внаслідок чого, порівняння їхніх результатів ускладнено.
Космічна фотозйомка можлива лише в фотографічному діапазоні спектру (довжин хвиль λ=0,5...0,9 мкм).
Внаслідок зауваженого провідн космічні держави орієнтуються насамперед не на космічну фотозйомку, а на космічну сканерну зйомку, яка дозволяє подолати наведені недоліки.
2.1.3 Космічна сканерна зйомка
Космічна сканерна зйомка (КСЗ) здійснюється за допомогою супутників, що не повертаються, кожний з яких функціонує протягом декількох років та передає зареєстровану інформацію на Землю по радіоканалам. З метою успішного здійснення КСЗ необхідне створення цілої системи моніторингу. До такої системи входять:
природо ресурсні ШСЗ,
наземний командно-вимірювальний комплекс,
канали зв’язку,
центри приймання та обробки нформації,
підсистема збору замовлень, каталогізації та розсилання знімків користувачам,
геостаціонарні ШСЗ (іноді), що приймають інформацію від природо ресурсних ШСЗ та направляють її на Землю.
Природоресурсна система здійсню періодичний глобальний огляд поверхні Землі, а використання її даних ма міжнародний характер.
КСЗ можлива при сонячному освітленні, тобто лише вдень.
При нахиленні орбіти ![]() =00 вона ма
назву екваторіальна, а при
=00 вона ма
назву екваторіальна, а при ![]() =900
полярна. При
=900
полярна. При ![]() <900,
коли супутник запускають в північно-східному напрямку (або південно-східному)
називають орбіту прямою, а при
<900,
коли супутник запускають в північно-східному напрямку (або південно-східному)
називають орбіту прямою, а при ![]() >900
оберненою. Запуск супутника на обернену орбіту енергетично
невигідний, так як обертання Землі в цьому випадку зменшує вихідну
орбітальну швидкість, однак для довготривалих природоресурсних супутників цей
виграш перекривається можливістю завжди пролітати зйомочний маршрут в денн
часи, до того ж в одні й ті ж самі.
>900
оберненою. Запуск супутника на обернену орбіту енергетично
невигідний, так як обертання Землі в цьому випадку зменшує вихідну
орбітальну швидкість, однак для довготривалих природоресурсних супутників цей
виграш перекривається можливістю завжди пролітати зйомочний маршрут в денн
часи, до того ж в одні й ті ж самі.
2.2 Космічні системи моніторингу
2.2.1 Високооперативна зйомка високого розрізнення
Для багатьох цілей комплексного моніторингу, тобто для контролю за повенями, утворенням та сходженням лавин селевих потоків, виверженнями вулканів, землетрусами, аварійним забрудненням морів та внутрішніх вод, зростанням та захворюванням посівів тощо, та для прийняття оптимальних рішень, пов’язаних з подібними явищами, необхідна високооперативна зйомка, аж до щодобової, до того ж з високим розрізненням порядку 10...20 М.
Доцільний перехід від природоресурсних систем до багатоцільових систем дистанційного зондування та моніторингу поверхні Землі, які б забезпечували як глобальний огляд, так зйомку окремих ділянок місцевості в необхідний момент та з необхідною частотою, аж до щодобової або ще вище. В такому випадку ділянками, що реєструються, можуть бути:
місто, що постраждало від землетрусу або іншого стихійного лиха;
діючий вулкан;
лісова пожежа;
нафтові плями в морі;
динаміка великої будівлі, гребл або кар’єру (особливо під час виникнення аварійних ситуацій) тощо.
Характерний розмір подібних гарячих ділянок” – декілька десятків кілометрів, а реєстрація їх часто необхідна лише протягом декількох діб активного розвитку процесу.
При надірній зйомці смуга огляду
оптичних датчиків високого розрізнення дорівнює добутку діаметра елемента ![]() на число
на число ![]() елементів в строчці
елементів в строчці ![]() до того ж для кращих із
снуючих датчиків М=6 000...10 000. Отже, при
до того ж для кращих із
снуючих датчиків М=6 000...10 000. Отже, при ![]() забезпечується
смуга огляду не ширше
забезпечується
смуга огляду не ширше ![]() . В таких умовах
відмова від глобальної зйомки дозволяє зменшити швидкість обробки інформації,
але не призводить до збільшення оперативності заданої вибіркової зйомки, через
що можна реєструвати лише ті ділянки, що знаходяться в межах вузьких смуг
огляду з відповідних витків орбіти.
. В таких умовах
відмова від глобальної зйомки дозволяє зменшити швидкість обробки інформації,
але не призводить до збільшення оперативності заданої вибіркової зйомки, через
що можна реєструвати лише ті ділянки, що знаходяться в межах вузьких смуг
огляду з відповідних витків орбіти.
Отже, системи моніторингу мають
базуватися на можливості зйомки з нахилом, коли реєстрація заданих ділянок, що
розташовані на різній відстані від траси, досягається нахилом осі датчика на
різні кути ![]() поперек траси. Дякуючи
цьому, один супутник може знімати будь-які ділянки через добу, а два супутники
цілодобово.
поперек траси. Дякуючи
цьому, один супутник може знімати будь-які ділянки через добу, а два супутники
цілодобово.
В подальшому під системами моніторингу будемо розуміти космічні системи, що призначені для частої, аж до щодобової зйомки численних заданих ділянок земної поверхні розмірами 60...200 км, до того ж, супутники обладнані камерами з розрізненням порядку 10...20 м, які допускають як вертикальну сканерну зйомку так і космічну сканерну зйомку з нахилом.
2.2.2 Система “Спот” та проект ,,Терс”
ШСЗ “Спот-1" був запущений в
лютому 1986 р. на майже кругову сонячно-синхронну ізомаршрутну орбіту з нахилом
![]() та середньою висотою 832 км, що відповідає числу обертів супутника N=145/26 навколо Землі на
добу. Кожний супутник обладнано двома апаратами високого розрізнення
HRV, що сканують ідентично. Інформація реєструється в цифровій формі із
швидкістю 30 Мбіт/с від кожної камери. Частина її запам'ятовується для скидання
під час польоту в зоні радіо видимості центрів приймання, створених в Росії,
Україні, Франції, Швеції, Австралії та Канаді. Решта інформації скидається в
реальному часі реєстрації і може прийматись на індивідуальних або колективних
пунктах приймання.
та середньою висотою 832 км, що відповідає числу обертів супутника N=145/26 навколо Землі на
добу. Кожний супутник обладнано двома апаратами високого розрізнення
HRV, що сканують ідентично. Інформація реєструється в цифровій формі із
швидкістю 30 Мбіт/с від кожної камери. Частина її запам'ятовується для скидання
під час польоту в зоні радіо видимості центрів приймання, створених в Росії,
Україні, Франції, Швеції, Австралії та Канаді. Решта інформації скидається в
реальному часі реєстрації і може прийматись на індивідуальних або колективних
пунктах приймання.
Камера апарату HRV є оптичною системою, телеоб'єктив якої має фокусну відстань f=100 см, діючий отвір 32 см та кут зору 2β=4,13о. Сканування місцевості електронне, засноване на використанні приладів із зарядовим зв'язком (ПЗЗ). Воно дозволяє відмовитись від скануючого дзеркала, неминучого в оптико-механічному скануючому апараті та від затвору, необхідного в фотокамері, тобто від механічного переміщення частин датчика, а також і відповідного двигуна.
Переваги електронного сканування
Відсутні вібрації датчика (як погіршують якість зображення та перешкоджають реєстрації строк з високою частотою).
Елементи строки реєструються не послідовно, а одночасно, що знімає енергетичне обмеження та дозволяє зменшити миттєве поле зору за умови збереження високого відношення сигналу до шуму.
У фокальній площині камери HRV встановлена лінійка (рядок) ПЗЗ довжиною 78 мм, яка складається з М=6 000 комірок (елементів) розміром 13 мкм кожна.
Передбачено 2 режими роботи HRV:
Панхроматичне знімання в зоні λ=0,51...0,73мкм при елементі розрізнення d=10 см з 64 градаціями яркості (6 біт на точку).
Багатозональна зйомка в зонах λ=0,50...0,59 мкм, 0,61...0,68 мкм та 0,79...0,89 мкм при d=20 м та 256 градацій (8 біт на точку).
В обох випадках швидкість переробки нформації для одного скануючого апарата 25 Мбіт/с, а з урахуванням службових даних та необхідної надмірності – 30 Мбіт/с.
Під час точної орієнтації супутника
реальні оптичні осі камер розташовані горизонтально, поперек маршруту зйомки, а
перед кожними із них встановлено дзеркало, що повертається, і змінює напрямок
центрального променя візування на вертикальне дзеркало, або яке відхилене
поперек траси руху супутника. Відхилення змінюється дискретно, через 0,6° та
забезпечує зйомку з нахилом ![]() оптично
осі від ±27° до вертикалі над супутникової точки. При цьому, через сферичність
Землі кут вимірюється від нахилу оптичної осі до вертикалі ділянки місцевості,
що реєструється в центрі, і він досягає 30,9°.
оптично
осі від ±27° до вертикалі над супутникової точки. При цьому, через сферичність
Землі кут вимірюється від нахилу оптичної осі до вертикалі ділянки місцевості,
що реєструється в центрі, і він досягає 30,9°.
При максимальному нахиленн оптичної осі розмір ділянки зйомки поперек траси зростає з 60 до 80 мкм, а елемент розрізнення від d=10 або 20 м відповідно до d=13 або 27 м. Камери можуть працювати як спільно, так і при незалежних одне від одного нахилень їхніх дзеркал.
При вертикальній (надірній) зйомці обома скануючими апаратами супутник “Спот” забезпечує глобальний огляд Землі 369 маршрутами за 26 діб. Система “Спот” призначена, насамперед для глобальної зйомки високого розрізнення та для стереофотографічного вимірювання рельєфу по стереопарі, відзнятою з двох різних витків. Однак цю систему можна розглядати і як перший варіант моніторингу.
Перехід від звичайних природоресурсних систем до системи моніторингу здійснюється за рахунок суттєвого ускладнення підсистеми зв'язку з користувачами.
Прототипом системи моніторингу,
заснованої на інших принципах, ніж Spot (“Спот”), слід вважати проект Ters
(“Терс”) (Tropisch Erdressourse Satellite), який був запропонований спільно
Нідерландами та Індонезією. Проект призначений для зйомки заданих ділянок
ландшафтів, які розташовані в широтному поясі ![]() ,
декілька разів протягом доби. Для супутника “Терс” обрано екваторіальну (
,
декілька разів протягом доби. Для супутника “Терс” обрано екваторіальну (![]() ) кругову орбіту з Н=1680
км, що відповідає N=12,0.
) кругову орбіту з Н=1680
км, що відповідає N=12,0.
При цьому супутник рухається вздовж
екватора на схід відносно Землі, що обертається, здійснюється за добу рівно на
один оберт менше, тобто відносно місцевості N´=11,0. Відповідно
супутник пролітає над ідентичними точками екватору через кожні ![]()
Оптична вісь скануючого приладу
супутника ,,Терс” відхиляється дзеркалом, що повертається поперек траси на
заданий кут ![]() -33,5º≤α≤+33,5°,
що відповідає куту
-33,5º≤α≤+33,5°,
що відповідає куту ![]() ≤44,3º
та віртуальній смузі огляду 2470 км. Це і забезпечує можливість зйомки
місцевості до широти φ=±11,2 º з кожного витка
орбіти. Система “Терс” добре використовує можливість багатократного збільшення
оперативності за рахунок відмови не лише від глобальної зйомки, але і від
глобального покриття Землі віртуальними смугами огляду. На жаль, використання
цієї ідеї для інших широтних поясів дає гірші результати.
≤44,3º
та віртуальній смузі огляду 2470 км. Це і забезпечує можливість зйомки
місцевості до широти φ=±11,2 º з кожного витка
орбіти. Система “Терс” добре використовує можливість багатократного збільшення
оперативності за рахунок відмови не лише від глобальної зйомки, але і від
глобального покриття Землі віртуальними смугами огляду. На жаль, використання
цієї ідеї для інших широтних поясів дає гірші результати.
2.2.3 Формування системи моніторингу на базі сонячно-сінхронних орбіт
Аналіз показує, що коли зйомка необхідна не частіше одного разу на добу, то систему моніторингу, як і природо ресурсну систему, доцільно формувати на базі сонячно-синхронних орбіт.
Віртуальну смугу огляду можна
збільшити, задаючи максимальний кут нахилу осі камери ![]() та більшу висоту кругово
орбіти. Однак скануючи апарати оптичного діапазону мають певні обмеження. Із
збільшенням кута
та більшу висоту кругово
орбіти. Однак скануючи апарати оптичного діапазону мають певні обмеження. Із
збільшенням кута ![]() зроста
відповідний йому кут нахилу променя візування до місцевої вертикалі ділянки
зйомки
зроста
відповідний йому кут нахилу променя візування до місцевої вертикалі ділянки
зйомки ![]() , що призводить
до погіршення якості зображення, його передаточних характеристик та
радіометричної точності внаслідок посилення впливу повітряної димки. Розрахунки
показують, що системи для щодобової зйомки з
, що призводить
до погіршення якості зображення, його передаточних характеристик та
радіометричної точності внаслідок посилення впливу повітряної димки. Розрахунки
показують, що системи для щодобової зйомки з ![]() ≤45°
можна зформувати з двох сонячно-синхронних супутників лише при Η≥800...850
км. При цьому траса другого супутника проходить точно по середині інтервалу
поміж трасами послідовних витків орбіти першого.
≤45°
можна зформувати з двох сонячно-синхронних супутників лише при Η≥800...850
км. При цьому траса другого супутника проходить точно по середині інтервалу
поміж трасами послідовних витків орбіти першого.
Доцільно формувати систему з двох дентичних супутників, що знаходяться на колокругових сонячно-синхронних орбітах з Η=830...850км, траси яких розташовані у відповідності до об’єкту моніторингу, а камери працювати з відхиленням оптичних осей поперек траси на кути до 40º. Така система забезпечує зйомку довільно розташованих ділянок (за умови відсутності хмарності над цими ділянками).
Для прийняття рішення реєстрацію тієї або іншої з заданих ділянок в реальному часі зйомки доцільно мати на борту спеціальний прилад для реєстрації хмарності. Їм може бути скануючий апарат середнього розрізнення, з оптичною віссю, яка відхилена на кут 45-50º попереду подовж траси, що реєструє розподілення хмарності в межах усієї віртуальної смуги огляду апарата високого розрізнення. Такий скануючий апарат надасть інформацію про можливість реєстрації ділянки приблизно за 1,5 хв. До моменту зйомки цієї ділянки, що достатня для автоматичного корегування програми зйомки за допомогою бортового комп'ютера.
Формування системи високого розрізнення для зйомки з інтервалом у декілька годин
Для високо оперативної зйомки з
числом супутників k≥4, оптимальну орбіту можна обрати незалежно від
сонячного освітлення. Спосіб обрання таких орбіт призводить до єдиної орбіти з
параметрами: ί =86, N=14,0, H=880 км. Ця орбіта дійсно забезпечує зйомку з
нахилом довільної ділянки місцевості датчиком високого розрізнення через кожн
24/k протягом усього світлового часу доби. Розрахунки показують, що при H=800
км віртуальна смуга огляду в 1430 км перекривається вузько кутовим датчиком при
![]() ≤44°, що допустимо.
≤44°, що допустимо.
Переваги системи, що базується на прямій геосинхронній орбіті, в порівнянні з системою моніторингу, що ґрунтується на сонячно-синхронних орбітах:
Система, що сформована з k супутників тривалого функціонування, забезпечує зйомку довільно розташованих заданих ділянок через кожні 24/k години протягом усього світлового часу доби. В той час як із сонячно-синхронних орбіт 4 супутники забезпечують зйомку не частіше, ніж 2 рази на добу.
Зйомка з прямої геосинхронно орбіти забезпечує одержання зображень місцевості при самих різних напрямках освітлення, а це дозволяє покращати інтерпретацію знімків за рахунок використання струкурозонального аналізу знімків та більшост нших статистичних і автоматизованих методів дешифрування.
За умови однакової середньо швидкості переробки інформації, для зйомки з прямої геосінхронної орбіти відповідають менші пікові навантаження.
Можливість зйомки полюсів Землі та примикаючи до них ділянок, що не забезпечуються з сонячно-синхронних орбіт.
Можливість здійснення 14 - кратно зйомки в різні інтервали часу доби.
Недоліки:
Неможливість здійснення суцільно надірної зйомки місцевості.
Деякі збільшення часток ділянок, що
завжди реєструються при нахиленнях оптичної осі, наближених до ![]()
Повільніше збільшення відсотка перекриття віртуальних смуг огляду з віддаленням від екватору.
Неможливість формування системи менш ніж з 4 супутників.
2.3 Вплив хмарності. Єдина багатоцільова система
2.3.1 Специфіка космічної зйомки високого розрізнення
Космічна зйомка високого розрізнення необхідна не лише з метою моніторингу, але й із метою рішення більшості задач дистанційного зондування Землі.
Особливості тако зйомки
Вузька смуга огляду, що на порядок та більше відрізняється від смуг огляду датчиків малого та середнього розрізнення.
Придатність результатів включення в серійні, масові пошуки екологічної, геологічної, сільськогосподарської та іншо направленості.
Необхідність здійснення зйомки лише в ясну погоду, при задовільній прозорості атмосфери.
Необхідність в більшості випадків, здійснення зйомки в суворо визначений сезон.
Жорсткі вимоги до надійності та своєчасності зйомки.
Отже космічні знімки високого розрізнення необхідні, якщо забезпечено їхнє надійне одержання і вони здійснен в необхідний сезон та ясну погоду.
2.3.2 Ймовірна оцінка впливу хмарності
Нехай буде називатись номінальним періодом зйомки n найменший інтервал часу в (добах) поміж двома реєстраціями ділянки, що досягається для конкретної знімальної системи без урахування впливу погодних умов. Для систем, що розраховані лише на надірну зйомку, n співпадає з періодом глобального огляду. Наприклад, для супутника Landsat-4 n= 16 діб.
Реальний період зйомки може істотно відрізнятись від номінального. Реальний період зйомки фіксованої ділянки залежить від n та від погодних умов на ділянці в заданий сезон його зйомки. Для наближеної оцінки ймовірності зйомки необхідна апріорна оцінка погодних умов.
Нехай спочатку необхідно визначити ймовірність P зйомки ділянки в фіксовану добу, у випадку, коли природоресурсний супутник типу Landsat пролітає в цей день над відповідною ділянкою. Час надірної зйомки ділянки сонячно-синхронної орбіти наперед невідомий, а зйомка можлива, якщо в цей час погода на всій ділянці ясна, але необхідно, щоб прозорість атмосфери була придатною, а хмар не було б і поблизу границь ділянки, бо інакше якість зображення зменшується, а коефіцієнти спектральної яскравост об'єктів виявляються перекрученими.
Крім того, апріорна оцінка P можлива лише за результатами багаторічних даних метеопостів, або ж метеореологічних супутників.
Для переходу до зйомки протягом
сезону тривалістю m діб будемо вважати значення апріорної ймовірност
зйомки для кожної доби сезону незалежними та позначимо через ![]() її середнє значення.
її середнє значення.
Оцінка впливу хмарності при космічній зйомці з метою дослідження природних ресурсів Землі або моніторинг складаються з рішення декількох основних задач.
Задачі, що відносяться до одноразово зйомки малої ділянки, що реєструється в межах однієї смуги огляду:
а) визначити ймовірність![]() здійснення зйомки протягом
сезону тривалістю m діб системою з nom періодом n діб;
здійснення зйомки протягом
сезону тривалістю m діб системою з nom періодом n діб;
б) здійснити попередній
розрахунок значення n, необхідне для зйомки в заданий інтервал m з
заданою ймовірністю ![]() .
.
Тіж самі задачі для ділянки, що реєструються лише в межах j смуг огляду (j≥2).
Тіж самі задачі для ділянки, що реєструються ί разів (ί≥2), до того ж кожного разу протягом інтервалу в m діб (припускається, що інтервали не пересікаються).
Задача 1а.
Задача зводиться до схеми випробувань Бернуллі, в якій число випробувань
може приймати одне двох значень з ймовірністю, що залежить від цілої та дробно
частини відношення ![]() . Рішення задач
одержують за рахунок використання формули повної ймовірності (Формула
Байеса):
. Рішення задач
одержують за рахунок використання формули повної ймовірності (Формула
Байеса):
![]()
В оберненій задачі 1б
формула, що одержана для визначення ![]() ,
використовується як рівняння, з якого і визначають відношення
,
використовується як рівняння, з якого і визначають відношення ![]() .
.
Таблиця 2.1
Ймовірність ![]() здійснення зйомок ділянки
в залежності від діяльності сезону m,
nom періоду системи n
та апріорних метеоумов (p)
здійснення зйомок ділянки
в залежності від діяльності сезону m,
nom періоду системи n
та апріорних метеоумов (p)
|
Одноразова зйомка (і=1) |
||||||||||||
|
р |
5/6 | 1/2 | 1/6 | |||||||||
|
|
7 | 15 | 30 | 90 | 7 | 15 | 30 | 90 | 7 | 15 | 30 | 90 |
|
j=1 |
||||||||||||
| 1 | 1,0 | 1,0 | 1,0 | 1,0 | 0,9 | 1,0 | 1,0 | 1,0 | 0,72 | 0,94 | 1,0 | 1,0 |
| 2 | 1,0 | 1,0 | 1,0 | 1,0 | 0,91 | 0,99 | 1,0 | 1,0 | 0,74 | 0,74 | 0,94 | 1,0 |
| 5 | 0,89 | 1,0 | 1,0 | 1,0 | 0,6 | 0,88 | 0,98 | 1,0 | 0,22 | 0,42 | 0,66 | 0,96 |
| 16 | 0,36 | 0,78 | 0,96 | 1,0 | 0,22 | 0,47 | 0,72 | 0,98 | 0,07 | 0,16 | 0,29 | 0,64 |
|
j=2 |
||||||||||||
| 1 | 1,0 | 1,0 | 1,0 | 1,0 | 0,94 | 1,0 | 1,0 | 1,0 | 0,33 | 0,74 | 0,97 | 1,0 |
| 2 | 0,96 | 1,0 | 1,0 | 1,0 | 0,59 | 0,95 | 1,0 | 1,0 | 0,1 | 0,36 | 0,74 | 1,0 |
| 5 | 0,28 | 0,93 | 1,0 | 1,0 | 0,1 | 0,5 | 0,89 | 1,0 | 0,01 | 0,07 | 0,26 | 0,83 |
| 16 | 0 | 0 | 1,0 | 1,0 | 0 | 0,22 | 0,86 | 0 | 0 | 0,02 | 0,24 | |
|
j=4 |
||||||||||||
| 1 | 0,98 | 1,0 | 1,0 | 1,0 | 0,5 | 0,98 | 1,0 | 1,0 | 0,02 | 0,23 | 0,76 | 1,0 |
| 2 | 0,24 | 0,99 | 1,0 | 1,0 | 0,03 | 0,57 | 0,98 | 1,0 | 0 | 0,02 | 0,23 | 0,96 |
| 5 | 0 | 0 | 0,94 | 1,0 | 0 | 0 | 0,34 | 1,0 | 0 | 0 | 0,01 | 0,35 |
| 16 | 0 | 0 | 0 | 0,89 | 0 | 0 | 0 | 0,29 | 0 | 0 | 0 | 0,01 |
|
Багаторазова зйомка(ί=2; 5; j=1) |
||||||||||||
|
ί=2 |
||||||||||||
| 1 | 1,0 | 1,0 | 1,0 | 1,0 | 0,98 | 1,0 | 1,0 | 1,0 | 0,52 | 0,88 | 1,0 | 1,0 |
| 2 | 1,0 | 1,0 | 1,0 | 1,0 | 0,83 | 0,98 | 1,0 | 1,0 | 0,53 | 0,55 | 0,88 | 1,0 |
| 5 | 0,79 | 1,0 | 1,0 | 1,0 | 0,36 | 0,72 | 0,96 | 1,0 | 0,05 | 0,18 | 0,44 | 0,92 |
| 16 | 0,13 | 0,61 | 0,92 | 1,0 | 0,05 | 0,22 | 0,52 | 0,96 | 0 | 0,03 | 0,08 | 0,41 |
| ί=5 | ||||||||||||
| 1 | 1,0 | 1,0 | 1,0 | 1,0 | 0,95 | 1,0 | 1,0 | 1,0 | 0,19 | 0,73 | 1,0 | 1,0 |
| 2 | 1,0 | 1,0 | 1,0 | 1,0 | 0,62 | 0,95 | 1,0 | 1,0 | 0,03 | 0,22 | 0,72 | 1,0 |
| 5 | 0,56 | 1,0 | 1,0 | 1,0 | 0,08 | 0,52 | 0,9 | 1,0 | 0 | 0,01 | 0,13 | 0,82 |
| 16 | 0,01 | 0,29 | 0,81 | 1,0 | 0 | 0,02 | 0,19 | 0,9 | 0 | 0 | 0 | 0,11 |
Аналогічно, хоч і дещо складніше, розв'язують і другу задачу. Після цього третя задача не викликає ускладнень, бо ймовірність здійснення ί-кратної зйомки дорівнює, за інших рівних умов, кореню ί-го ступеню із ймовірності одноразової зйомки.
2.3.3 Результати розрахунків ймовірност зйомки
В табл. 2.1 наведені результати
ймовірності здійснення зйомок P в залежності від
тривалості сезону, можливостей та необхідного числа повторних реєстрацій, а в
табл. 2.2 - відношення ![]() при
різних
при
різних ![]() ,
,![]() , j та ί, що
дозволяють визначити nom період системи n – необхідний для реєстрації певно
ділянки в заданий сезон.
, j та ί, що
дозволяють визначити nom період системи n – необхідний для реєстрації певно
ділянки в заданий сезон.
Таблиця 2.2
Значення m/n
в залежності від ί,j,p
та заданої ймовірності ![]() здійснення
зйомок
здійснення
зйомок
|
j |
ί |
|
P=5/6 |
P=2/3 |
P=1/2 |
P=1/3 |
P=1/6 |
| 1 | 1 | 0,9 | 1,5 | 2,2 | 3,4 | 5,7 | 13 |
| 0,95 | 1,8 | 2,8 | 4,5 | 7,4 | 16 | ||
| 0,99 | 2,8 | 4,3 | 6,7 | 11 | 25 | ||
| 2 | 0,9 | 1,8 | 2,8 | 4,4 | 7,6 | 16 | |
| 0,95 | 2,1 | 3,5 | 5,4 | 9,1 | 20 | ||
| 0,99 | 3,0 | 4,9 | 7,7 | 13 | 26 | ||
| 5 | 0,9 | 2,3 | 3,7 | 5,7 | 10 | 21 | |
| 0,95 | 2,8 | 4,3 | 6,7 | 11 | 25 | ||
| 0,99 | 3,7 | 5,8 | 8,0 | 15 | 26 | ||
| 2 | 1 | 0,9 | 5,7 | 7,9 | 11 | 18 | 38 |
| 0,95 | 6,3 | 8,8 | 13 | 21 | 44 | ||
| 2 | 0,9 | 6,2 | 8,8 | 13 | 21 | 44 | |
| 0,95 | 6,8 | 9,8 | 14 | 29 | 49 |
Із таблиць слідує, що існуюч природо-ресурсні системи не забезпечують не лише потреби моніторингу, але багатьох звичайних задач вивчення природних ресурсів, які зовсім, на перший погляд, не потребують частого виконання зйомки.
Ще гірше діється при необхідност відзняти скажімо, трапецію масштабом 1:200 000 з розрізненням на місцевост порядку 10 м.
Висновки: Природоресурсн системи типу “Landsat” та сучасні варіанти КА для великомасштабної космічно фотозйомки не забезпечують надійного рішення більшості задач дослідження природних ресурсів Землі, тим більше моніторингу.
Ця ненадійність особливо виявляється сильною для країн з великою територією, значна частина яко розташована у високих широтах (Росія).
Ненадійність систем типу “Landsat зростає і, можливо, буде зростати і далі, бо з розвитком дистанційних методів вимоги до обрання сезону зйомки стають жорсткішими. Зйомка має здійснюватись протягом того ж місяця або, навіть, тижня, коли дешифровані прикмети об'єктів, що вивчаються, проявляються найкраще, а з табл. 2.1 видно, що при цьому ймовірність реєстрації ділянки може різко зменшитись. Так, наприклад, при ί=1, j=2, p=1/6 ймовірність.
2.4 Досвід використання українсько-російського КА “Океан-О” для вирішення задач землекористування, природоохорони та раціонального використання природних ресурсів
2.4.1 Космічний апарат “Океан-О”
Космічний апарат (КА) “Океан-О (табл.2.3, рис.2.1) призначений для оперативного одержання інформації про Землю в оптичному, інфрачервоному та мікрохвильовому діапазонах спектра, а також для збору і передачі інформації з наземних платформ.
Робота вимірювальної апаратури здійснювалась на замовлення користувачів та за програмою наукових експериментів, розроблених провідними науково-дослідними організаціями академій наук і космічних агентств України та Російської Федерації.
Таблиця 2.3
Основні технічн характеристики КА “Океан-О”
| Маса КА, кг | 6150 |
| Маса корисного навантаження, кг | 1520 |
| Похибка орієнтації, кут. хв. | 10 |
| Кутова швидкість стабілізації, град/с | 0,0015 |
|
Потужність системи електропостачання: в сеансі, Вт середньодобова, Вт |
3500 1700 |
| Висота сонячно-синхронної орбіти, км | 668 |
| Нахил орбіти, град | 98 |
| Циклічність повторення під супутникової траси, доба | 4-16 |
| Термін активного снування, рік | до 3 |
| Замовники: |
Національне космічне агентство України Російське космічне агентство |
| Розробник: | ДКБ “Південне” імен М.К. Янгеля |
| Виробник: | ВО “Південний машинобудівний завод” |
| Ракета-носій: | “Зеніт-2” |
| Місце запуску: | Байконур |
| Дата запуску: | 17 липня 1999 року |
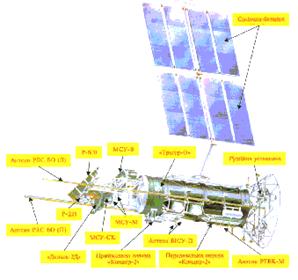
Рис. 2.1. Українсько-російський КА “Океан-О”
2.4.2 Призначення КА “Океан-О”
оперативне отримання і передача користувачам даних дистанційного зондування для дослідження природних ресурсів Землі та Світового океану;
вирішення господарських завдань природокористування;
екологічний моніторинг;
попередження та контроль надзвичайних ситуацій.
2.4.3 Вимірювальна апаратура КА “Океан-О”
Таблиця 2.4
|
Вимірювальна апаратура |
Довжина хвилі, спектральний діапазон |
Просторове розрізнення |
Смуга огляду |
| РЛС БО: радіолокаційна станція бокового огляду (2 комплекти – РЛС БО (П) з правостороннім оглядом і РЛС БО (Л) з лівостороннім оглядом | 3,0 см |
2,5х1,3 км* |
455 км |
| МСУ-М: багатоканальний скануючий пристрій малого розрізнення (2 комплекти – основний резервний) |
0,5-0,6 мкм 0,6-0,7 мкм 0,7-0,8 мкм 0,8-1,1 мкм |
2,5х1,3 км8 |
1975 км |
| МСУ-СК: багатоканальний скануючий пристрій середнього розрізнення (2 комплекти МСУ-СК1 з переднім оглядом і МСУ-СК2 з заднім оглядом) |
0,53-0,59 мкм 0,59-0,72 мкм 0,72-0,81 мкм 0,81-1,00 мкм 10,05-12,6 мкм |
245х157 м* 245х157 м* 245х157 м* 245х157 м* 820х157 м* |
620 км |
| МСУ-В: багатоканальний скануючий пристрій високого розрізнення |
0,48-0,52 мкм 0,54-0,61 мкм 0,63-0,73 мкм 0,78-0,92 мкм 0,92-0,99 мкм 1,47-1,62 мкм 2,06-2,38 мкм 10,6-12,0 мкм |
50 м 50 м 50 м 50 м 50 м 100 м 300 м 250 м |
195 км |
| “Дельта-2Д”: багатоканальний скануючий мікрохвильовий радіометр |
0,8 см** 1,35 см** 2,25 см** 4,3 см** |
17х22 км* 28х37 км* 49х65 км* 91х120 км* |
1130 км |
| Р-225: трасовий НВЧ-радіометр | 2,25 см | 130 км | |
| Р-600: трасовий НВЧ-радіометр | 6,0 см | 135 км | |
| “Трасер-О”: поляризаційний спектрорадіометр |
411-809 нм (31 підканал**) |
135 км |
2.4.4 Характерні особливості роботи КА “Океан-О”
Вимірювальна апаратура КА дає змогу здійснювати комплексні синхронні дослідження у видимому, інфрачервоному мікрохвильовому діапазонах, а також синхронно вимірювати параметри довкілля з використанням апаратури збору даних з наземних платформ (рис. 2.2).

Рис. 2.2. Геометрія смуг огляду вимірювальної апаратури при передачі інформації через радіолінію КА Океан-О”
Дві РЛС БО з правостороннім лівостороннім оглядом дають змогу здійснювати повне охоплення земної поверхн радіолокаційною зйомкою.
Інформація РЛС БО і МСУ-М через радіолінію 137 ГГц може оперативно передаватися користувачам (понад 1000 приймальних станцій у світі) (рис.2.3).
2.4.5 Інформаційні системи КА “Океан-О”
|
Радіотелевізійний комплекс (РТВК-М) |
|
| Тип | Аналоговий |
| Частота несучої, ГГц | 137,4 |
| Смуга частот, кГц | 2,4 |
| Місткість пристрою що запам’ятовує, хв.: | 5 |
|
Бортова інформаційна система уніфікована (БІСУ-П) |
|
| Тип | Цифровий |
| Частота несучої, ГГц | 8,2 |
| Швидкість безпосередньої передачі інформації, Мбіт/с | 61,44 або 15,36 |
| Швидкість запису нформації, Мбіт/с | 15,36 або 0,96 |
|
Місткість пристрою що запам’ятовує, хв.: для потоку 15,36 Мбіт/с для потоку 0,96 Мбіт/с |
6 100 |
Рис. 2.3. Схема передачі інформації з РЛС БО та МСУ-М КА “Океан-О” через радіолінію 137 ГГц
2.4.6 Схема організації наземного сегменту
Схема організації наземного сегменту обміну, обробки та розповсюдження інформації з КА “Океан-О” наведена на рис. 2.4.
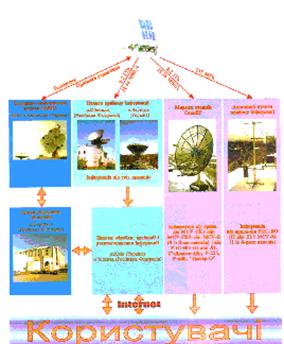
Рис. 2.4. Схема організації наземного сегменту
2.5. Землекористування, природоохоронні та природоресурсні задачі
2.5.1 Роль космічної інформації у вирішенні задач землекористування та природоохорони
Для України характерні значна густота населення і досить висока концентрація промислового та сільськогосподарського виробництва. Тому потрібно здійснювати оперативний контроль екологічного стану екосистем, навантаження на які в деяких регіонах перевищу екологічно допустимі межі. Це ускладнюється і негативним впливом на природу наслідків аварії на Чорнобильській АЕС, а також загрозою проникнення токсикантів із системи вода – порода в підземні води, які забезпечують водопостачання 2/3 населених пунктів країни.
Для вирішення актуальних завдань раціонального природокористування необхідно створити сучасні засоби для отримання оперативної інформації про стан геосистем України.
Найбільш ефективними методами оперативного контролю геоекологічного стану є аерокосмічні методи зондування Землі в різних спектральних діапазонах. Сучасний рівень розвитку засобів дистанційного зондування Землі (ДЗЗ) дозволяє отримати дані про параметри суші та води з необхідними просторовими елементами розрізнення і періодичністю поновлення інформації. Досвід експлуатації природоресурсних ШСЗ показав перспективність та ефективність застосування методів ДЗЗ. Тому, згідно з Державною космічною програмою України здійснено запуск українського супутника Січ-1” (1995 р.) та українсько-російського апарата “Океан-О” (1999 р.).
Як свідчить практика, найкращ результати досягаються за умови комплексного, синхронного проведення космічних наземних досліджень, коли результати наземних вимірювань екстраполюються на картосхеми, одержані на основі космічних знімків.
2.5.2 Дослідження урбанізованих та техногенно змінених територій з небезпечними геологічними процесами
Геоекологічне дешифрування матеріалів сучасних багатозональних космічних зйомок та їх інтерпретація з геолого-картографічними даними на урбанізовані території з небезпечними геологічними процесами дозволяють оцінити і прогнозувати розвиток цих процесів.
На вміщеному геозображенні (рис. 2.5)(знімок в ближньому ІЧ-діапазоні, 4 канал МСУ-В, КА “Океан-О” від 10.11.99 р.) представлені результати дешифрування сучасних геологічних процесів: зсувів та підтоплення територій.
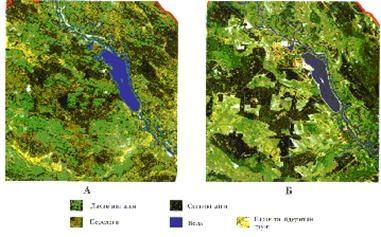
Рис. 2.5. Схематична класифікація ландшафтів Київської області (знімок А - з КА “Океан-О” та Б – з КА “Landsat”)
Зсуви чітко дешифруються. Вони поширені на правобережжі Києва. Виділяються дві зони зсувів – Придніпровська та Центральна (долина р. Либідь та її яружно-балкова мережа). На даний період нараховується близько сотні зсувів, більшість з яких стабілізована повністю або частково. Є ряд потенційно небезпечних ділянок з частково діючими зсувами або такими, що можуть активізуватися при обводненні верхніх горизонтів. Основн форми зсувів – ниркоподібні, зсуви-потоки, осипи пісків.
Картування глибин рівнів ґрунтових вод (Н) та визначення зон підтоплення здійснювалось за ландшафтно-індикаційною методикою, що базується на встановленні зв’язку між видимими на багатозональних знімках компонентами ландшафту (рельєф, ґрунти, поверхневі води, рослинність). Крім того, у межах території з проектним покриттям (СV) 30-35 % Н визначалась з використанням щільності фототону знімка ближнього ІЧ-діапазону (Р) згідно з отриманою емпіричною залежністю:
![]()
де ![]() і
і![]() - коефіцієнти, що залежать
від типу ґрунту та СV, визначаються на тест-ділянках за даними
наземних визначень Н.
- коефіцієнти, що залежать
від типу ґрунту та СV, визначаються на тест-ділянках за даними
наземних визначень Н.
Як показали дослідження, на території міської агломерації поширене явище підтоплення ґрунтів. Підтоплення житлових і промислових будівель, транспортної мережі становить значну небезпеку для ряду ділянок Києва. Підтоплена майже вся заплава Дніпра, Либіді, Нивок та нших річок, особливо внаслідок впливу підпору Канівського водосховища техногенних факторів. У деяких районах лівобережжя міста підтоплення набуло загрозливого характеру.
Постійно діючий моніторинг на баз космічних зйомок для дослідження небезпечних геологічних процесів на територіях міських агломерацій сприятиме вирішенню нагальних проблем геоекологічного стану урбанізованих територій, що динамічно розвиваються.
2.5.3 Вивчення геодинамічних зон
Важливе значення в геоекологічних дослідженнях за матеріалами космічних зйомок належить виявленню геодинамічних зон, які ототожнюються з розривними формами прояву сучасного тектогенезу в осадочному чохлі. Вони дешифруються за космічними знімками у вигляді лінійно організованих елементів ландшафтів, виражених на поверхні Землі, - зон лінеаментів (рис. 2.6).

Рис.2.6. Ділянки з потенційно небезпечними геологічними процесами в межах території м. Києва та його околиць 10.11.1999 р.
На картосхемі представлен геодинамічні зони, становище яких уточнено за результатами дешифрування матеріалів багатозональних космічних зйомок із КА “Океан-О”. Це зони відносно нестабільності та підвищеної міграції речовин. Окремі з них успадкували розломи фундаменту. До геологічних зон належить активізація розвитку певних геологічних процесів – зсувів, площинної та лінійної ерозії, суфозії, значних змін рівня рунтових вод. Особливо активного розвитку такі процеси набувають на площинах геодинамічних вузлів (рис. 2.7).

Рис. 2.7. Геодинамічн зони в межах території м. Київ та його околиць
2.5.4 Визначення техногенних змін сучасних ландшафтів
Нікопольський промисловий район зазнає значних техногенних змін від гірничодобувного, промислового та селітебного комплексів, транспортних та комунікаційних мереж, меліоративних робіт. Геологічне середовище зазнає незворотних змін, які потребують постійного нагляду, контролю та передбачення. Структура зображення та рисунок ландшафтів, отриман у кожному конкретному діапазоні, сприяють картографуванні території за ландшафтними особливостями та окремими природними та техногенними компонентами.
Розрізнювальна здатність зображення з КА “Океан-О” у діапазоні 0,63-0,69 мкм дозволяє збільшувати його до масштабу картографування 1:100000. Цей діапазон найдоцільніше використовувати для вивчення ділянок техногенного порушення поверхні, літологічних відмінностей поверхневого покриву та ґрунтів. В ньому чітко дешифруються кар’єри з видобутку марганцевих руд. До того ж, у даному каналі фіксуються не тільки діючі, а й засипані кар’єри і рекультивовані землі. Цей діапазон дозволяє також виявляти території з підвищеним рівнем ґрунтових вод, що проявляються на зображенн відмінностями спектральних характеристик (рис. 2.8).
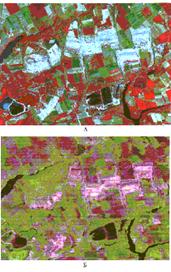
Рис. 2.8. Нікопольський промисловий марганцево добувний район
Порівняння різночасових і різних за джерелами отримання (носіями та апаратами) знімків можливе після їх приведення до єдиного масштабу, корекції і трансформації та використання в близьких за характеристиками діапазонах спектру. На прикладі Орджонікідзенської марганцево-добувно ділянки виконано порівняльний аналіз двох різночасових знімків з інтервалом у 4 роки та зафіксовано зміни, що відбулися в розвитку порушеності геологічного середовища марганцевими кар’єрами в часі і просторі. На зображенні чітко фіксуються рекультивовані ділянки відпрацьованих кар’єрів та перезволожен ділянки з підвищеним рівнем ґрунтових вод. Наведено карту техногенезу (техногенних утворень) цієї ділянки, яку складено при порівнянні знімків з КА Landsat-TM” від 10.06.96 р. У діапазоні 0,63-0,69 мкм (рис. А) та з КА Океан-О”, МСУ-В від 21.08.2000 р. У діапазоні 0,63-0,73 мкм (рис. Б). Карта відображає техногенно порушені ландшафтні комплекси, тобто техногенн ландшафти, які зазнали значних змін за короткий проміжок часу. Загальна площа кар’єрів, зайнята відкритими розробками та відвалами, майже не змінилась, але х просторове розташування зазнало суттєвих змін. Лише 60 % площі кар’єрів співпало з показниками 1996 року, тоді як на 40 % кар’єрів проведено засипку часткову рекультивацію ландшафтних комплексів. За цей час збільшились і площ підтоплення внаслідок природного і техногенного впливу (рис. 2.9).
2.5.5 Визначення фітосанітарного стану та пожежонебезпечності лісів на прикладі Зони відчуження ЧАЕС
Як відомо, рослинність, що зазна негативного впливу шкідників або несприятливих природних умов, за своїми оптичними властивостями відрізняється від здорової рослинності. За даними наземних досліджень, у зоні відчуження соснові ліси пошкоджені гусінню соснового шовкопряда та кореневої губки. Осику вражає осиковий трутовик, березу березова губка.
Ліси, пошкоджені сосновим шовкопрядом, займають великі площі у центральній частині Зони відчуження. Інтенсивність пошкодження змінюється з часом: як правило, шовкопряд розвивається в одних і тих же районах протягом багатьох років. Єдиний метод боротьби з гусінню соснового шовкопряда – авіаційна обробка лісів. Площі лісів, пошкоджені шовкопрядом, легко визначаються за їх візуальним обстеженням.
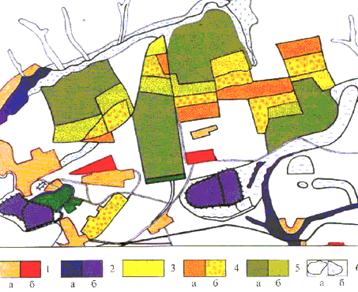
Рис. 2.9. Карта техногенних змін Нікопольського промислового марганцеводобувного району: 1- ландшафтно-територіальні комплекси: а – селітебні; б – промислові; 2 – шквальн комплекси: а – природно-техногенного походження б - техногенного походження (шламонакопичувачі, відстійники); 3 – техногенно-порушені ландшафтн літологічні комплекси зайняті кар’єрами, станом на 1996 р.; 4 – техногенно порушені ландшафтні і літологічні комплекси зайняті кар’єрами станом на 2000 р.; 5 – рекультивовані ландшафтно-техногенні комплекси: а – станом на 1996 р.; б – що рекультивувалися за період 1996-2000 рр.; 6 – ландшафтні комплекси з підвищеним рівнем ґрунтових вод: а – станом на 1996 р.; б – за період 1996-2000 рр.
Як свідчать наземні обстеження, значні площі соснових лісів пошкоджені кореневою губкою, що візуально фіксується лише на кінцевій стадії захворювання, коли дерева гинуть і в ліс з’являються поляни. Це значно ускладнює визначення площі уражених лісів, особливо на початковій стадії. На відміну від пошкодження сосни сосновим шовкопрядом, інтенсивність пошкодження кореневою губкою не змінюється в часі. Дані про вплив на дерева та розповсюдження осикового трутовика і березової губки дуже обмежені, що вплинуло на їх виділення за спектральними яскравостями.
Несприятливий вплив на стан соснових і листяних лісів спричинений зміною гідрологічного режиму в Зоні: після аварії припинено роботу дренажної системи, внаслідок чого підвищився рівень ґрунтових вод, заболочуються окремі території. Візуально фіксувати цей процес дуже складно, необхідні моніторингові дослідження, які зараз не проводяться.
Для визначення фітосанітарного стану лісів території що досліджується (рис. 2.10) з використанням матеріалів дистанційних зйомок було підібрано 48 характерних тестових ділянок для кал бровки матеріалів дистанційних зйомок, інформація про які стала базою наземно апріорної інформації.
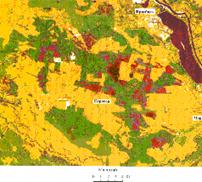
Рис. 2.10. Схема
фітосанітарного стану лісових масивів правобережжя р. Прип’ять в межах зони
відчуження ЧАЕС (багатозональний знімок з КА “Spot-4”, 14.07.98 р.): ![]() - соснов
ліси найбільш пошкоджені;
- соснов
ліси найбільш пошкоджені; ![]() - середнього ступеню
пошкодженості;
- середнього ступеню
пошкодженості; ![]() - послаблені дією негативних
факторів
- послаблені дією негативних
факторів
Аналіз оптичних властивостей соснових лісів, одержаних за багатозональним космічним знімком з КА “Spot-4”, дозволив виявити вплив вищезгаданих негативних факторів на зміни інтенсивності спектральних яскравостей рослинності. Найбільш чітко виявився вплив соснового шовкопряда, що знайшло відображення у підвищенні спектральних яскравостей в зеленій, червоній середній ІЧ зонах спектру та зменшенні у ближній ІЧ зоні. За ступенем відмінності спектральних яскравостей здорові та пошкоджені сосновим шовкопрядом ліси були розподілені на дві групи – слабо пошкоджені та пошкоджені.
Вплив кореневої губки на оптичн властивості соснових лісів підібраний до впливу соснового шовкопряду, але менш чітко виражений. Виявилось, що оптичні властивості сосни, ушкодженої кореневою губкою, і сосни, слабо пошкодженої сосновим шовкопрядом, дуже близькі.
Вплив підтоплення на оптичн властивості сосни менш інтенсивний, ніж вплив пошкодження сосни сосновим шовкопрядом або кореневою губкою. Крім того, він визначається за характером змін спектральних яскравостей у різних каналах видимого спектру.
Отже, проведені дослідженн свідчать про те, що хвороби та несприятливі умови існування соснових лісів позначаються на їх оптичних властивостях, які можна зафіксувати за даними багатозональної космічної зйомки.
Аналіз спектральних яскравостей рослин дозволив визначити ліси, пошкоджені гусінню соснового шовкопряду та кореневою губкою.
Уражені кореневою губкою соснов ліси невеликі за площею. Простежується тісний просторовий зв’язок найбільших за площею ділянок, пошкоджених кореневою губкою, з ділянками початкового ушкодження сосновим шовкопрядом. Враховуючи характер розвитку цих захворювань, можна припустити, що сосновий шовкопряд пошкоджує передусім ліси, послаблен кореневою губкою.
Соснові ліси, пошкоджені гусінню соснового шовкопряда, займають декілька порівняно великих відокремлених ділянок, переважно в центрі Зони.
Схема фітосанітарного стану лісів, складена з використанням значень спектральних яскравостей і вегетаційних ндексів, підтверджує, що соснові ліси широко розповсюджені на цій території. Виділяються площі, які майже повністю пошкоджені сосновим шовкопрядом. За спектральними характеристиками визначено площі лісів, більш-менш інтенсивно ушкоджених гусінню соснового шовкопряду. Проведена у польових умовах перевірка підтвердила надійність одержаних результатів досліджень, та передані для використання у виробничих умовах.
2.5.6. Картування ділянок підвищеної природної пожежобезпечності
Лісові пожежі, зокрема у зон відчуження ЧАЕС, ускладнюють екологічну й радіологічну обстановку, спричиняючи повторне забруднення території повітряним перенесенням продуктів згоряння. Тому найактуальніше завдання – своєчасне їх попередження, проведення застережних протипожежних і спеціальних еколого-лісівничих довготривалих заходів для підвищення природної стійкості деревостанів, впорядкування лісокультурних площ.
Для оцінки пожежобезпечност рослинного покриву території зони відчуження ЧАЕС використано запропонований в Центральному агентстві з космічного дистанційного зондування (ЦАКЗД) НАН України методичний прийом, який враховує вегетаційні індекси та значення спектральних яскравостей у середньому ІЧ каналі знімка з КА “Spot-4”, що відповідають ступеню зволоженості поверхні Землі. На рисунку позначено три ступені природно небезпеки виникнення пожеж (рис. 2.11). Найбільш небезпечними є соснові ліси, які інтенсивно пошкоджені сосновим шовкопрядом і перетворилися в суцільний сухостій. Значно меншу небезпеку становлять листяні ліси, оскільки вони розповсюджені на більш зволожених та заболочених ділянках. Інші території віднесено до проміжного ступеню природної пожежобезпечності.
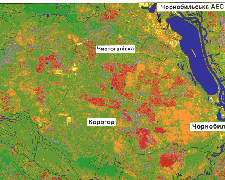
Рис.2.11. Схема
природної пожежобезпечності центральної частини зони відчуження ЧАЕС (багатозональний
знімок з КА “Spot-4”, 14.07.98 р.). Ступені пожежобезпечності у відповідност
до стану рослинності на момент зйомки: соснові ліси - ![]() - висока;
- висока; ![]() - середня;
- середня; ![]() - порівняно
низька; листяні ліси -
- порівняно
низька; листяні ліси - ![]() - низька; перелоги, луки,
згарники -
- низька; перелоги, луки,
згарники - ![]() -
висока;
-
висока; ![]() -
середня;
-
середня; ![]() -
вода;
-
вода; ![]() -
пісок та відкриті піщані ґрунти
-
пісок та відкриті піщані ґрунти
Схема природної пожежобезпечност використовувалась у практичній роботі ДСВКЛП “Чорнобильліс”, а також для проведення застережних протипожежних заходів, упорядкування лісокультурних площ у 1999 році.
2.5.7 Вивчення рослинності
Це завдання вирішувалось на матеріалах досліджень Зони відчуження ЧАЕС, рослинність якої всебічно вивчена наземними та дистанційними методами. Інші райони України не охоплені таким повним набором дистанційних і наземних даних.
На територію Зони відчуження зроблено лише один знімок високої розрізнювальної здатності сканером МСУ-В з КА Океан-О” (рис. 2.12). Але його виконано не в оптимальні для вивчення рослинності терміни: восени, 03.10.99 р., коли значна частина листя опала, а у хвойних деревах послаблені процеси обміну в голках. Порівняно з літнім періодом, восени на оптичні властивості рослинності має значний вплив відбиття (поглинання) випромінювання стовбурами та гілками дерев.
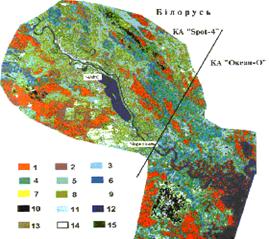
Рис. 2.12. Схема класифікації рослинності східної частини зони відчуження ЧАЕС за типами рослинних угруповань (багатозональні знімки з КА “Spot-4”, 03.10.99 р.): 1 – ліси з перевагою сосни; 2 – соснові ліси, пошкоджені сосновим шовкопрядом; 3 – розріджені змішані листяні ліси та площі, що заростають вербою; 4 - змішані листяні ліси з перевагою берези; 5 - залісення територій переважно молодою березою; 6 – змішані листяні ліси з перевагою вільхи; 7 акація; 8 – луги та заплавні луки; 9 – перелоги; 10 – зварники; 11 – відкрит піщані ґрунти з рідкою трав’янисто-чагарниковою рослинністю; 12 – вода; 13 техногенні об’єкти; 14 – хмари; 15 – тіні від хмар
З метою оцінки можливостей знімків з КА “Океан-О” для вивчення рослинності було проведено класифікацію з вивченням зображень знімка (рис.2.12) від 03.10.99 р. Її проведено за методом максимально вірогідності – як найбільш інформативного, з використанням програмного продукту ERDAS Imagine. Об’єкти дослідження включали всі основні різновиди рослинного покриву, які були вибрані на підставі матеріалів лісовпорядкувальних робіт та відносно рівномірно розповсюджені на досліджуваній території. Крім різновидів рослинності враховані елементи ландшафту, які займають досить значну площу, - це водна поверхня, населені пункти, проммайданчик ЧАЕС та піщані дамби.
Встановлено, що в межах досліджуваної території відокремлюються всі основні елементи ландшафту. Це соснові ліси, пошкоджені сосновим шовкопрядом, ліси з перевагою вільхи або берези. Інші види листяних лісів виділити не вдалося. Помітно відокремлюються перелоги, добре видно їх ділянки, що заростають сосною та листяними породами дерев. Відносно добре відокремлюються зварники у лісах. За даними досліджень, у межах зварників відбувається інтенсивний процес заростання. Практично не виділились ті види рослинності, які займають невеликі відокремлені ділянки. Це деревостани з перевагою дуба та осики, посадки акації, сади тощо. Серед не пов’язаних з рослинністю елементів ландшафту найчіткіше відокремлюються природні й техногенні об’єкти. Відкрита водна поверхня також добре відрізняється, але місцями відокремлюються невеликі хибні водні поверхні. Не відокремились населені пункти і техоб’єкти.
За даними наземної перевірки, достовірність наведеної класифікації задовільна.
Співставлення результатів класифікації ландшафтів за даними знімків з КА “Океан-О” з результатами аналогічної класифікації ландшафтів за багатозональним знімком високо розрізнювальної здатності з КА “Spot”, зробленого 14.07.98 р. У чотирьох зонах спектру, показало, що на обох знімках чітко відокремлюються основні види рослинності, природні та техногенні елементи ландшафту, просторове розрізнення яких ідентичне.
Однак значно менша розрізнювальна здатність знімка з КА “Океан-О”, неоптимальний час проведення зйомки та менша кількість спектральних каналів обумовили те, що за даним знімком відокремилось менше класів ландшафту, ніж за знімком з КА “Spot”.
На рис. 2.12 наведено класифікацію рослинності зони відчуження, складену за результатами обробки двох знімків, але межі між ними встановити важко, що свідчить про близькість отриманих результатів.
ІІІ. ЕКОЛОГІЯ КОСМОСУ
Проникнення людини в космос природний і логічний крок (рис. 3.1). Необхідність в цьому обумовлена двома основними причинами: отримання нових підходів і можливостей наукового дослідження і пізнання світу; пошук нових джерел для задоволення енергетичних потреб всього людства на планеті Земля, а отже, і вирішення однієї із глобальних екологічних проблем ресурсозберігання та природокористування.

Рис. 3.1. Робота людини в навколоземному космічному просторі
Перш за все, космічна техніка відкриває можливості по-новому поставити вивчення нашої планети, і в тому числ вирішити екологічні проблеми. Вже перші ШСЗ дозволяли з великою точністю визначити форму Землі, що при використанні наземних засобів потребувало би багаторічної праці. Вимірювання, які були проведені за допомогою супутників, космічних зондів, спрямованих до Місяцю, Венери, Марсу і інших планет Сонячно системи, ніби розсунули межі контактів Землі з світовим простором.
Космічні дослідження нерозривно пов'язані з енергетикою Землі. Сучасна енергетики орієнтована на використання, головним чином, не поновлюваних органічних палив (нафта, газ, вугілля), спалювання яких дає більше 80 % усієї використовуваної енергії.
Вирішення проблем енергетики Земл пов'язують зі створенням так званої “тривимірної” енергетики, сенс якої поляга у виносі до космосу перетворювачів сонячної енергії з наступною передачею енергії на Землю.
Конкретні приклади створення тривимірної” енергетичної інфраструктури визначають роботу у декількох напрямках: створення космічних електростанцій для енергозабезпечення Земл забезпечення транспортних операцій в навколоземному космічному просторі (рис. 3.2); освітлення районів Землі за допомогою орбітальних станцій, таких як “Мир”, яка за допомогою пристроїв відбиття освітила частину поверхні Землі на півдн Росії (подібний експеримент проводився і в Україні (див. рис. 3.3); створення космічних ліній передачі енергії на велику відстань; управління тепловим світловими режимами районів Землі.

Рис. 3.2. Створення космічної електростанції для енергозабезпечення Землі
Сучасний світ неможливо уявити без космонавтики; достатньо зауважити, що супутники забезпечують точність роботи систем всього світу, а космічні системи забезпечують функціонування супутникового телебачення, прогнозують погоду, здійснюють космічний моніторинг Землі.

Рис. 3.3. Експеримент з освітлення районів Землі за допомогою орбітальної станції “Мир” (Росія)
Супутники раннього виявлення ядерних вибухів та інших техногенних катастроф забезпечують інформацією наземн служби спостереження практично в реальному масштабі часу. Але одночасно інтенсивне освоєння космічного простору в мирних (позитивних) цілях використовується також військово-промисловому комплексі (ВПК).
3.1 Ракетно-космічні комплекси
Ракетно-космічний комплекс (РКК) – це сукупність функціонально пов'язаних космічних апаратів (КА) і наземних технічних засобів, призначених для самостійного вирішення поставлених задач у космосі (рис. 3.4).

Рис. 3.4. Технологічн експерименти на орбіті Землі
Ракетно-космічний комплекс включа ракету-носій, космічний апарат, технічний комплекс, стартовий комплекс, засоби вимірювального комплексу космодрому і наземний комплекс керування космічним апаратом.
Космодром це комплекс соціально підготовлених земельних територій зі спорудами обладнанням, які забезпечують зборку, підготовку до пуску і пуск ракетно-космічної системи, вимірювання траєкторії її польоту, видачу команд, а також приймання і обробку телеметричної інформації, яка надходить з ракетно-космічної системи. До складу космодрому також входять земельні та водяні ділянки для падіння відпрацьованих ступенів ракет-носіїв і для посадки космічних об'єктів, які повертаються.
В теперішній час більш як 10 країн світу мають свої програми освоєння космосу. З них такі країни спроможн виводити до космосу за допомогою своїх носіїв: Росія, США, Франція, КНР, Великобританія, Індія.
За своєю структурою ракетно-космічні системи частіше за все представляють собою багатоступеневий комплекс, який включає до свого складу декілька ракетних блоків і корисне навантаження, яким може бути космічний корабель, космічна станція, штучний супутник планети, різного роду космічні апарати, включаючи і апарати військового призначення.
Таблиця 3.1
Класифікація ракет-носіїв
|
Клас РН |
Стартова маса, т |
Корисне навантаження, т |
| Легкі | до 100 | до 5 |
| Середні | до 300 | 5...20 |
| Важкі | до 1000 | 20...100 |
| Надважкі | Понад 1000 | Понад 100 |
Таблиця 3.2
Загальна характеристика ракет-носіїв
| Тип | Стартова маса, т/маса палива, т | Корисне навантаження, т | Кількість ступенів |
| Протон | 600/500 | 20 | 3(4) |
| Енергія | 2400/1806 | 100 | 2 |
| Титан-СЛВ-5 | 630/548 | 20 | 2+2 приск. |
| Спейс-Шатл | 2000/1806 | 100 | 2 |
Основною функцією ракети-носія (РН) є надання першої космічної швидкості (7,9 км/с) корисному навантаженню.
Визначають чотири класи РН. У табл. 3.1 - 3.2 наведені прийнята класифікація РН та загальні дані зі стартової маси корисного навантаження РН, які під час старту здійснюють найбільш потужний вплив на всі шари атмосфери.
3.2 Фактори техногенного впливу космічного польоту на довкілля
В залежності від цілі, поставлено перед космічним апаратом, його можливо скеровувати в різні райони космічного простору. Аналіз цих районів довів, що експлуатація РКТ пов'язана з впливом на природне середовище в масштабах як екосфери Землі (літосфера, атмосфера, гідросфера), так і Сонячної системи.
Експлуатація ракетно-космічних комплексів ставить ряд екологічних проблем, найважливіші з яких є:
шкідливий вплив продуктів згорання ракетних палив на атмосферу Землі;
проблеми знищення озонового шару Землі і електронного компонента атмосфери;
забруднення космічного простору фрагментами ракетно-космічної техніки;
необхідність відчуження значних земельних територій під райони падіння окремих складових ракет-носіїв по трасам х пусків.
Техногенні фактори, які впливають на навколишнє середовище при експлуатації РКТ, суттєво відрізняються за параметрами факторів від більш розповсюджених видів антропогенних факторів впливу на навколишнє середовище. До таких факторів відносяться:
принциповий характер можливого фізичного механізму впливу на оточуюче середовище;
масштаби можливого впливу (локальн або глобальні);
середовище, на яке здійснює вплив РКТ (суша, вода, атмосфера);
характер впливу (за терміном часу).
Можливість глобального впливу РКТ на природне середовище обумовлюється, по-перше, тим, що траєкторія руху РН при виведенні КА проходить крізь всі шари атмосфери над територіями регіонів, значно віддалених від місця старту, по-друге, тим, що КА і останні ступені ракет, які виведені на орбіту при гальмуванні у верхніх шарах атмосфери, при неповному х згорянні в атмосфері представляють загрозу для великих територій на поверхн Землі, а ті з них, які можуть тривалий час існувати в навколоземному просторі, забруднюють його після припинення їх активного існування і являють собою загрозу для тих КА, які будуть виводитись в космічний простір.
До глобальних факторів екологічного впливу можна віднести:
викиди продуктів згоряння в атмосферу (в тому числі токсичні) при роботі РН на активній ділянці;
згоряння в атмосфері відпрацьованих ступенів РН та КА;
забруднення навколоземного простору фрагментами відпрацьованих пристроїв (КА, останні ступені РН, окремі елементи конструкції);
падіння в непередбачених ділянках території з відпрацьованих елементів конструкцій як РН, так і КА в аварійних ситуаціях.
До локальних факторів впливу можна віднести:
проливання токсичних компонентів палива при його транспортуванні до місця заправки і при самій заправці;
штатне падіння відпрацьованих ступенів РН;
розповсюдження звукового тиску ударні хвилі при русі РН;
викиди продуктів згоряння при стендовому відпрацюванні двигунів.
3.3 Вплив ракетно-космічної техніки на озоновий шар Землі
Озон руйнується в результаті впливу водяної пари, який міститься в значній кількості в продуктах згоряння, а також оксидів азоту і кисню повітря під дією високих температур в факелах ракетних двигунів, і при польоті практично будь-якого РН в озоновому шарі утворюється озонове вікно. Модель руйнування озонового шару при одиночному пуску РН "Енергія можна уявити у такий спосіб. У сліді ракети діаметром декілька сот метрів озон руйнується повністю на усіх висотах практично миттєво. Під впливом макротурбулентної дифузії речовини, що викидаються, перемішуються в радіусі багатьох кілометрів за декілька годин. Вміст озону в цьому стовпі на висотах 16...24 км зменшується на 15...20 % через 2 години, а потім озон поступово відтворюється. Хмара викидів в атмосфері після одного тижня досягає розмірів декілька сот кілометрів. Максимальне руйнування озону в хмарі відбувається на висотах 24...30 км приблизно через 24 доби після проходження РН. Одночасно в тропосфер оносфері відбувається відтворення озону. З урахуванням комплексного позитивного ефекту загальний вміст озону у районі пуску РН “Енергія” (в межах вертикального стовпа діаметром 550 км) знижується через 24 доби на 1,7 %, або у масовому відношенні на 27 тис. т. В табл. 3.3-3.4 наведені дані руйнування озонового шару.
Таблиця 3.3
Діаметр зони руйнування озону при реакції з СО на різних висотах
| Ракета-носій | Висота, км | |||
| 20 | 30 | 40 | 50 | |
| Аріон-4 | 0,9 | 1,0 | 2,6 | 9,2 |
| Протон | 1,2 | 1,4 | 3,5/2,7 | 9,7 |
| Атлас | 1,5 | 1,7 | 4,3 | 15,3 |
| Титан | 4,6 | 5,4 | 13,5/1,7 | 6,0 |
| Спейс-Шаттл | 3,6 | 4,3 | 10,7 | 0 |
| Енергія | 3,2 | 3,8 | 9,5 | 0 |
| Дельта | 2,9/1,8 | 1,3 | 3,2/0,8 | 2,8 |
| Скаут | 1,2/0,9 | 1,0 | 2,5/1,2 | 4,3 |
Таблиця3.4
Розмір (Г) зони
локального руйнування озону в результаті фотодисоціації ![]() для різних РН і час (t)
досягнення
для різних РН і час (t)
досягнення
| Ракета-носій | Висота, км | ||||||
| 40 | 50 |
|
|||||
| Г, км | t, год | Г, км | t, год | ||||
| Енергія | 5,6 | 2,5 | 34,0 | 9,0 | |||
| Аріон-4 | 1,3 | 0,8 | 10,0 | 3,7 | |||
| Атлас | 0,77 | 0,5 | 5,0 | 2,4 | |||
| Протон | 0,24 | 0,22 | 1,8 | 1,0 | |||
| Дельта | 0,19 | 0,17 | 1,5 | 0,83 | |||
3.4 Вплив пусків ракетоносіїв на іоносферу
При польоті в іоносфері основний продукт згоряння важких РН, що працюють на киснево-водневому паливі, - вода. Враховуючи відсутність води на великих висотах, сам факт її появи в іоносфері є
фактором забруднення природного середовища, що становить потенційну небезпеку порушення природної рівноваги.
На висотах 70...90 км, де найбільш низька температура, молекули води швидко перетворюються у кришталики льоду. На ще більших висотах в іоносфері спостерігається взаємодія водяного пару з оносферною плазмою. В результаті утворюються зони з пониженою щільністю електронів, які змінюють характер розповсюдження радіохвиль різних частот, що призводить до порушення зв'язку тощо. Спостерігається також аномальне світіння.
Часто ефекти, пов'язані з впливом пусків РН на іоносферу, називають іоносферними "дірками״. Вперше утворення іоносферних дірок було зафіксовано у 1973 році при виведенні на навколоземну орбіту американської станції Scylab, за допомогою РН ”Сатурн-5”, двигуни якої працювали включно до висот 300 – 500 км. На цих висотах іонізація іоносфери максимальна.
В місті проходження РН концентрація електронів зменшилась більш ніж у 2 рази, а площа дірки досягла 1 млн. км кв.
Питання, пов'язані зі зниженням антропогенного впливу на іоносферу, знаходяться на стадії дослідження утворення оносферних “дірок״. Жодних методів зниження техногенного впливу поки що не розроблено.
3.5 Космічне сміття
Кожний запуск КА в космічний простір супроводжується утворенням на орбітах декількох десятків елементів конструкції, що відділяються від супутників і ракет-носіїв. За роки космічно ери на навколоземних орбітах було зареєстровано більш ніж 20 тис космічних об'єктів штучного походження розміром близько 10 см. Служба нагляду за космосом США на початок 1992 року вела стеження за 7200 об'єктами штучного походження (ОШП). З них тільки 5 % є функціонуючими ШСЗ, 23 % відпрацьовані ШСЗ, 10 % відпрацьовані ступені РН. Решта 63 % фрагментарн залишки РКС. В числі 7200 об'єктів 58 супутників (діючих і непрацездатних) мають на борту в енергетичних установках радіоактивні речовини масою більш ніж одна тонна.
Екстраполяція за допомогою математичних моделей показує, що число фрагментів розміром 40 мм становить понад 18 тис.
Крім того, накопичилося 50...70 тис. часток розміром 1...2 см. Кількість ще дрібніших частинок оцінюється десятками мільйонів.
Основна небезпека космічного сміття пов'язана з космічними швидкостями зіткнення орбітальних фрагментів з КА. Наприклад, частинка діаметром 0,5 мм може пробити космічний скафандр. Найбільша х концентрація в діапазоні висот 300...1600 км.
В найближчий час видалення фрагментів космічного сміття уявляється проблематичним і потребує економічних витрат і подальшої роботи в цьому напрямку.
3.6 Дистанційний агро моніторинг
3.6.1 Мета сучасної системи агромоніторингу
Сучасна система моніторингу сільськогосподарських об'єктів має остаточну мету - визначення стану посівів сільськогосподарських культур (для прийняття рішень щодо управління продукційними процесами), прогнозу їх урожайності та визначення угідь і ґрунтів.
3.6.2 Недоліки існуючої системи збору інформації
Методи оцінки продуктивності й моделі прогнозування врожайності, розроблені в УкрДНДПТІ "Агроресурси", базуються на наземній агрометеорологічній та агробіологічній інформаціях, які збирають у певні фази вегетації рослин. Надходження такої інформації забезпечує мережа агро-метеостанцій Держкомгідромету, системи пунктів сигналізації та прогнозу поширення шкідників, хвороб і бур'янів, системи карантину, сортовипробувань, станцій захисту рослин. Моніторинг ґрунтів складається з періодичних обстежень ґрунтового покриву та угідь і оновлення на їх основі карт ґрунтів та землекористування. Ці роботи виконують в Інституті Укрземпроект та його обласних філіях.
Таким чином, існуюча система збору нформації є досить громіздкою. Вона не завжди забезпечує оперативність отримання інформації (наприклад, характеристик стану ґрунтів). У виробничому режимі можливе одержання результатів спостережень лише в окремих точках на невеликій кількості ділянок метеостанцій, станцій захисту рослин та ін. Тобто, наявна мережа наземних спостережень не може забезпечити адекватною інформацією для завдань прогнозування на великих площах різних територіально-адміністративних рівнів. Це вносить значну похибку при прогнозуванні за рахунок вирівнювання просторових неоднорідностей у розподіленні параметрів.
При використанні дистанційних методів інформаційна база для оцінки продуктивності та прогнозу врожайност може бути значно розширена. Про це свідчить сучасний досвід США (експеримент LАКІЕ, програма LАМР та ін.), Франції (АСТІОN IV), Великій Британії.
3.6.3 Принципові можливості дистанційних методів агромоніторингу
Для вирішення згаданих завдань найважливіші такі принципові можливості дистанційних методів:
проведення регулярного оперативного контролю за станом об'єктів;
одержання просторово визначених характеристик посівів і ґрунтів з різною просторово-часовою роздільною здатністю;
одночасність прямого виміру важливих агрофізичних параметрів;
одержання послідовного ряду зйомок для виявлення сезонних та довгострокових змін;
визначення змін, необхідних для програм регулювання при оновленні інформації про стан місцевості;
порівняно невисокі витрати на моніторинг;
включення зйомок у систему сучасного моніторингу;
одержання значень таких параметрів посівів, наземні виміри яких у виробничих умовах, як правило, не проводять через велику трудомісткість контактних методів (наприклад, фітомаси).
Сучасний стан розвитку дистанційних досліджень дає змогу встановлювати певний перелік показників, необхідних для моделювання прогнозу врожайності в різні фази вегетації.
Раціональне поєднання даних, одержаних дистанційними засобами спостереження, враховуючи їх можливості, даних наземних метеорологічних та агробіологічних спостережень дасть змогу підвищити рівень інформаційного забезпечення прогнозування стану та врожайност сільськогосподарських культур.
Вирішення зазначеної проблеми забезпечується проведенням науково-дослідних та дослідно-конструкторських робіт УкрДНДПТІ "Агроресурси" щодо створення та поетапного введення в експлуатацію галузевої інформаційної системи комплексної обробки аерокосмічно та наземної інформації (ГІСКОАНІ).
3.6.4 Функціональне призначення галузевої системи комплексної обробки аерокосмічно та наземної інформації (ГІСКОАНІ)
Передбачається, що функціональним призначенням такої системи має стати систематичне дистанційне спостереження за станом сільськогосподарських культур, рослинності, угідь та ґрунтів у процес господарської діяльності з метою поступової оцінки (контролю), прогнозу та видачі рекомендацій щодо управління і забезпечення користувачів на всіх рархічних рівнях управління оперативною, середньостроковою та довгостроковою нформацією.
Об'єктом досліджень такої системи має бути система агроландшафтів та їх складових і характеристик (табл.2.1).
Таблиця 2.1
Об’єкти досліджень ГІСКОАНІ
| Об’єкти досліджень, х складові та характеристики | Регіональний рівень | Локальний та детальний рівень |
| 1 | 2 | 3 |
| Посіви сільськогосподарських культур: | ||
| види культурно рослинності; | + | + |
| ступінь розвитку рослин; | - | + |
| загальний стан посівів. | ||
| Стан посівів диференційовано: | ||
| а) фітомаса - біометричні показники; | + | + |
| Б) зрідженість; | - | + |
| в) засміченість; | - | + |
| г) патологічні зміни; | + | + |
| д) ураження шкідниками. вплив на посіви погодних умов, стихійних лих, аварій (оперативна оцінка); | + | + |
| Стан природно рослинності. | + | + |
| Ґрунтовий покрив: | ||
| ґрунтові відміни; | + | + |
| фізико-хімічн характеристики; | + | + |
| лінійна ерозія; | + | + |
| вітрова ерозія; | + | + |
| поверхневий змив; | + | + |
| зони підтоплення, перезволоження та вторинного засолення і т.д. | + | + |
| Земельно-кадастров дані: | ||
| а) структура сільськогосподарських угідь | + | + |
| б) характеристика використання земель | + | + |
| в) площинн характеристики об'єктів | + | + |
3.6.5 Основні завдання системи дистанційного агромоніторингу
Основні завдання системи дистанційного агромоніторингу можна поділити на дві групи.
Перша:
контроль та оцінка стану сільськогосподарських культур по фазах вегетації рослин;
визначення осередків заселення посівів шкідниками, ураженість хворобами, забур'яненість;
прогнозування врожайності, визначення строків достигання сільськогосподарських культур;
контроль за ходом сільськогосподарських робіт.
Друга :
картографування та інвентаризація сільськогосподарських угідь і ґрунтів;
моніторинг земель, що перебувають у кризовому стані (визначення земель, що є у кризовому стані);
вітрова і водна ерозії;
визначення стану використання меліорованих земель;
фіксація забруднень та негативних явищ, що виникають при застосуванні нераціональних гідротехнічних і хімічних меліорацій та ін.
3.6.6 Призначення отриманої інформації
Поступове розширення можливостей дистанційного зондування визначення різноманітних характеристик об'єктів агроландшафту (табл. 2.1) сприятиме одержанню необхідної інформації, яку можна буде використовувати за такими призначеннями:
розробка планів і заходів щодо оперативного та довгострокового догляду за посівами сільськогосподарських культур;
прогнозування продуктивност посівів та встановлення валових зборів сільськогосподарських культур;
встановлення рівня потреб у хімічних засобах захисту рослин, добривах по регіонах держави;
планування стратегії ринку сільськогосподарської продукції та її ціноутворення;
встановлення економічних збитків від стихійних метеорологічних явищ і техногенних факторів;
корекція планів землекористування;
бонітування земель;
моніторинг земель;
коригування карт ґрунтів;
розробка державних планів та заходів щодо охорони земель;
планування заходів з хімічної, лісової та водної меліорації;
встановлення ступеня негативного впливу техногенних процесів на навколишнє середовище в зонах великих міст та промислових підприємств.
3.6.7 Вимоги до функціонування системи моніторингу
Завдання системи дистанційного агромоніторингу щодо одержання інформації, специфіка продукційних процесів у сільськогосподарській галузі визначають вимоги до функціонування системи моніторингу.
До цих вимог відносять:
оперативне одержання об'єктивно нформації про стан сільськогосподарських об'єктів для прийняття рішень на державному та регіональному рівнях;
оперативне одержання як комплексно дистанційної інформації про сільськогосподарські об'єкти, так і окремих їх характеристик;
необхідна періодичність, повнота та якість одержуваної інформації;
гнучкість застосування різноманітних космічних та авіаційних носіїв і різноманітних дистанційних методів.
3.6.8 Спільні риси розроблених систем дистанційного агромоніторингу
Аналіз експериментів з обстеження сільськогосподарських об'єктів, проведених у США в 70—80 рр. (LАКІЕ, СІТАRS), Франції (АСТІON IV) показав, що спільним для всіх розроблених систем дистанційного моніторингу є:
застосування вибіркового методу збору даних по мережі полігонів, еталонних ділянок, сегментів для здійснення дентифікації і моніторингу стану посівів основних сільськогосподарських культур;
урахування впливу фізико-географічних (ґрунти, агрокліматичні умови) та господарських умов (агротехніка, сівозміна, розмір полів, структура посівних площ, богарні та зрошувані землі) при визначенні мережі полігонів і зон їх обслуговування, що дає змогу з високою достовірністю екстраполювати сигнатури на всю зону обслуговування;
застосування мультитемпоральних даних дистанційного зондування для ідентифікації сільськогосподарських культур та їх стану;
забезпечення процесу автоматизованого дешифрування опорною наземною тематичною інформацією (тренувальні дані);
автоматизована обробка дистанційних даних.
3.6.9 Структура системи дистанційного агромоніторингу
За функціональним призначенням у системі виділяють дві підсистеми — підсистему збору даних і підсистему тематичної обробки.
Підсистема збору даних. Підсистема збору даних забезпечує проведення дистанційних зйомок та наземних спостережень на полігонах і отримання апріорно нформації (дані про фізичні властивості досліджуваних об'єктів, їх стану на момент зйомок та ін.).
Підсистема тематично обробки. В підсистемі тематичної обробки дані зйомок та апріорна інформація обробляються засобами автоматизованого дешифрування і через підсистему виводу передаються користувачу.
Умови функціонування системи аерокосмічного інформаційного забезпечення. Таким чином, система аерокосмічного інформаційного забезпечення, передусім, має бути максимально централізованою стосовно системи збору даних. Це стосується, насамперед, технічних засобів дистанційного зондування та схеми розміщення полігонів. Датчики повинні забезпечувати проведення багатоспектральних зйомок у широкому діапазоні випромінювання з високою геометричною й енергетичною роздільною здатністю, а полігони (АКП) і тестов ділянки (ТД) мають бути репрезентативними для вивчення комплексу об'єктів чи явищ. Це відкриває можливості для інформаційного забезпечення ширшого кола користувачів без значного підвищення витрат.
3.6.10 Схема розташування і функціонування АКП і ТД
У зв'язку з неоднорідністю в просторі природних умов і ресурсів і пов'язаним із ними характером господарсько діяльності, необхідною умовою функціонування системи є розробка раціонально схеми АКП і ТД, яка забезпечить оперативність, повноту і репрезентативність отримуваної інформації та незначні витрати на проведення дистанційних зйомок.
Раціональна мережа АКП ТД. Розробку раціональної мережі забезпечує спеціалізоване районування території, в основу якого покладено існуючу схему природно-сільськогосподарського районування.
Визначення зон репрезентативності. При визначенні зон репрезентативності враховуються ландшафтні, агрогрунтові, агрокліматичні, геоморфологічні умови, аналізується структура фотофону космічних зображень території. Агрокліматична зональність є провідною при районуванні в координатах часу.
Визначення місця розташування АКП і ТД. При визначенні місця розташування АКП і ТД керуються наступними основними вимогами:
представництво в межах територ обслуговування;
вивченість регіону;
наявність науково-дослідної та нформативної бази окремих служб (агрометеостанцій, ДДСС, держсортодільниць, станцій захисту рослин), транспортної інфраструктури ;
доступності району.
Форма площі АКП та його розміри. Форма площі полігона та його розміри визнаються відповідно до статистичних вимог, враховуючи структуру посівних площ, геометричні розміри і нарізку полів та фактор часу для оперативного проведення аерозйомки й аеровізуальних спостережень.
3.6.11 АКП і ТД на території України
Таким чином, на території України визначено 20 зон обслуговування, в межах яких сільськогосподарські об'єкти мають певною мірою сталі характеристики, та 28 полігонів і тестових ділянок (рис. 3.13).
Диференціація на полігони і тестов ділянки пов'язана з тими функціями які вони виконують. Функція полігонів подвійна, як територій збору тематичних та дистанційних даних для інформаційного забезпечення відповідних установ і територій проведення науково-дослідних та дослідно-методичних робіт щодо розробки методів дистанційного зондування стосовно певних природних умов. Тестові ділянки - це територія для збору нформації про стан агроресурсів.
На основі районування певних сільськогосподарських культур на території України розроблено призначення аерокосмічних полігонів для збору оперативної інформації про стан агроресурсів визначено межі обслуговування АКП за адміністративними ознаками.
При виконанні синхронних дистанційних досліджень на полігонах і тестових ділянках потрібна інформація для планування та організації робіт. У зв'язку з цим на кожен АКП складають паспорт.

Рис. 3.13. Мережа аерокосмічних полігонів для аерокосмічного моніторингу
3.6.12 Паспорт АКП та його структура
Паспорт полігона включає геодезичн та географічні координати, аеро- й космовивченість території, фізико-географічний та агрокліматичний опис, характеристику ґрунтового покриву, мережу наземних спостережень, підбірку тематичних і топографічних карт, матеріали дистанційних зйомок, спектральні характеристики об'єктів, строки проведення дистанційних досліджень для вирішення різноманітних завдань з урахуванням природних умов. Така інформація щодо полігона дає змогу розробляти методи і технології діагностики сільськогосподарських об'єктів.
3.7 Вплив атмосфери на електромагнітне випромінювання
Електромагнітне випромінювання (ЕМВ) під час проходження крізь атмосферу зазнає поглинання та розсіювання. Крім того, теплове випромінювання й розсіювання з інших напрямків роблять свій внесок у випромінювання, що реєструється. Отже, вплив атмосфери на ЕМВ, що несе нформацію про об’єкт навколишнього середовища, має бути обмеженим.
Поширення ![]() -випромінювання. На
нтенсивність
-випромінювання. На
нтенсивність ![]() -випромінювання,
що надходить через атмосферу на систему реєстрації, впливає вологість ґрунту.
Збільшення вологості зумовлює послаблення цього випромінювання. Збільшення
вологості зумовлює послаблення цього випромінювання.
-випромінювання,
що надходить через атмосферу на систему реєстрації, впливає вологість ґрунту.
Збільшення вологості зумовлює послаблення цього випромінювання. Збільшення
вологості зумовлює послаблення цього випромінювання.
Поширення випромінювання видимої та близької інфрачервоної (ІЧ) областей спектру. У видимому діапазоні основним фактором послаблення оптичного випромінювання молекули та аерозолі атмосфери.
Основними молекулами атмосфери, здатними поглинати оптичне випромінювання, є водяна пара, СО2, О, О2, СО, СН4 та оксиди азоту. Особливо багаті на лінії поглинання асиметричн молекули, такі як Н2О, О. Молекули лінійні за своєю структурою (СО2, NО2, NО, СО, О2, N2) мають меншу кількість ліній на спектральний інтервал, хоча спектри цих молекул можуть бути складними (як, наприклад, у молекули метану). Поглинання відбувається за переходів між коливальними та обертальними рівнями. Крім того, молекули основних компонентів атмосфери - О2, N2 – внаслідок своєї симетрично структури позбавлені електричного дипольного моменту й не беруть участі у процесі поглинання.
За відсутності опадів атмосфера містить дисперговані тверді та рідкі частинки (льоду, пилу, ароматичних та органічних речовин, біологічних матеріалів), що мають розміри від кількох молекул до 40 мкм. Такі колоїдні системи, в яких газ (у даному випадку повітря) містить дисперговані частинки, називають аерозолями.
Під час взаємодії оптичного
випромінювання з середовищем, внутрішня структура якого неоднорідна, має місце
розсіювання випромінювання. Цей процес супроводжується поширенням частини
випромінювання у напрямку, що відрізняється від напрямку поширення
випромінювання, що відрізняється від напрямку поширення випромінювання, яке
падає. Характер розсіювання оптичного випромінювання залежить від співвідношення
поміж розмірами частинок середовища, які розсіюються, та довжиною світлово
хвилі ![]() . Звичайно в атмосфер
середньої прозорості розсіювання на аерозолях домінує, якщо довжина оптичного
випромінювання перевищує 0,5 мкм.
. Звичайно в атмосфер
середньої прозорості розсіювання на аерозолях домінує, якщо довжина оптичного
випромінювання перевищує 0,5 мкм.
Розсіювання Релея виника
за зміщення зв’язаних електронів під впливом електричного поля, що падає на
молекулу. Це поле сприяє утворенню диполя, який коливається і посилає ЄМВ тако
ж частоти. Розсіювання Релея характеризується тим, що інтенсивність розсіяного
випромінювання змінюється залежно від четвертого ступеню довжини світлово
хвилі. Саме такою залежністю можна пояснити природний блакитний колір неба,
який отримується за відбивання сонячного світла від частинок пилу від частинок
пилу й водяної пари, присутніх в атмосфері. У видимій області спектру є істотна
залежність інтенсивності розсіяного випромінювання від довжини хвилі;
розсіювання Релея відбувається при ![]() В
області
В
області ![]() мкм цим типом розсіювання
можна знехтувати.
мкм цим типом розсіювання
можна знехтувати.
Розсіювання Мі відбувається
на частинках великих розмірів ![]() супроводжується виникненням інтерференції світла, що призводить до появи
нтерференційної картини та істотної зміни діаграми кутового розподілу
розсіяного світла.
супроводжується виникненням інтерференції світла, що призводить до появи
нтерференційної картини та істотної зміни діаграми кутового розподілу
розсіяного світла.
Розсіювання Дебая відповіда
проміжному випадку між двома попередніми типами розсіювання – Релея і ![]()
![]()
В інфрачервоній області спектру
проходження ЕМВ обмежене вікнами прозорості атмосфери (![]() мкм; 1,2 мкм
мкм; 1,2 мкм![]() мкм; 1,5 мкм
мкм; 1,5 мкм![]() мкм; 2,0 мкм
мкм; 2,0 мкм![]() мкм). Таким чином,
проходження оптичного випромінювання повз атмосферу характеризується процесами
його поглинання та розсіювання атмосферними молекулами й аерозолями. Під час
проходження через атмосферу оптичне випромінювання зазнає ослаблення, що
визначається за законом Бера:
мкм). Таким чином,
проходження оптичного випромінювання повз атмосферу характеризується процесами
його поглинання та розсіювання атмосферними молекулами й аерозолями. Під час
проходження через атмосферу оптичне випромінювання зазнає ослаблення, що
визначається за законом Бера:
![]() (3.1)
(3.1)
де ![]() -
коефіцієнт пропускання;
-
коефіцієнт пропускання;
![]() -
коефіцієнт послаблення;
-
коефіцієнт послаблення;
![]() -
довжина оптичного шляху.
-
довжина оптичного шляху.
Величина коефіцієнта послаблення ![]() залежить від
процесів поглинання молекул
залежить від
процесів поглинання молекул ![]() ,
розсіювання молекул
,
розсіювання молекул ![]() , поглинання
аерозолів
, поглинання
аерозолів ![]() , та розсіювання аерозолів
, та розсіювання аерозолів ![]() , присутніх в атмосфері:
, присутніх в атмосфері:
![]() (3.2)
(3.2)
де індекси “М” і “А” відповідають молекулам та аерозолям відповідно.
Поширення теплового випромінювання ІЧ області спектру. Пропускання атмосфери в ІЧ області спектру (3...20 мкм) наведено на рис. 3.14.
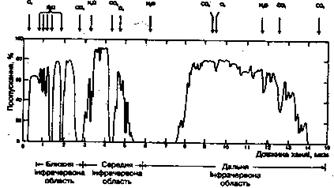
Рис. 3.14. Пропускання атмосфери в ІЧ області спектру
Поширення надвисокочастотного (НВЧ) випромінювання. Використання НВЧ області дає можливість спостерігати за земною поверхнею через хмари та опади. Спектр пропускання НВЧ випромінювання в області 3...300 ГГц наведено на рис. 3.15. Спостереження у вікнах прозорості (до 40 ГГц та в інтервалі 80...100 ГГц) дають змогу оцінювати опади за допомогою штучних супутників Землі.
3.8 Системи дистанційного зондування Землі
Збирання, опис та аналіз інформац щодо об’єктів навколишнього середовища на відстані називається дистанційним зондуванням. Методи й техніка дистанційного зондування ґрунтуються на реєстрац поглиненої, відбитої або випроміненої енергії, що надає специфічних характерних ознак основним компонентам біосфери. Розглянемо основні типи систем дистанційного зондування.
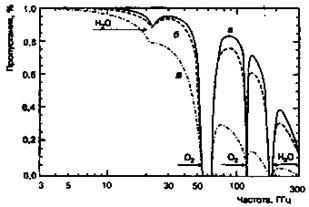
Рис. 3.15. Спектр пропускання НВЧ випромінювання в області 3...300 ГГц: а чиста стандартна атмосфера; б – хмари товщиною 0,5 км; в – шаруваті хмари товщиною 2 км
3.8.1
Реєстрація ![]() -випромінювання
-випромінювання
Метод ґрунтується на вимірюванн
короткохвильового ![]() м
м![]()
![]() - випромінювання присутніх
у земній корі або сніговому покриві радіоактивних елементів – природних радіоізотопів
- випромінювання присутніх
у земній корі або сніговому покриві радіоактивних елементів – природних радіоізотопів
![]() У звичайному ґрунті майже
90 %
У звичайному ґрунті майже
90 % ![]() - випромінювання утворюється
в 20 – сантиметровому поверхневому шарі.
- випромінювання утворюється
в 20 – сантиметровому поверхневому шарі.
3.8.2 Фотографічні системи
В основі техніки повітряно фотографії покладено створення на фотоплівці зображень земної поверхні з авіа носіїв та супутників. Зазвичай використовують чорно-білі панхроматичні, чорно-біл ІЧ, кольорові та кольорові ІЧ плівки. Фотографічні системи здатні створювати зображення об’єктів навколишнього середовища з високим рівнем розділення; застосування технологій багато спектральної фотографії дає змогу отримати додаткову специфічну інформацію, на яку меншою мірою впливають температура й вологість довкілля. Фотографічні системи, що встановлюються на літаках, здатн забезпечити знімки з висоти понад 20 км; розміри площі, яка фотографується, можуть сягати 30Х50 км2.
3.8.3 Відеографічні системи
Застосування відеокамер дає змогу створювати та записувати зображення у видимій, близькій та середній ІЧ областях спектру. Перевага відеосистем - невисока вартість, створення та накопичення послідовних зображень будь-якого процесу. Недолік відносно невисоке просторове розрізнення.
3.8.4 Багатоспектральні сканери
Принцип дії таких систем полягає у
реєстрації спектрального відбиття об’єктами навколишнього середовища на певних
спектральних ділянках видимого та ІЧ спектру ![]() мкм
мкм![]() Ці ділянки можуть бути або
широкими (близько 0,2 мкм), або вузькими (менше 0,01 мкм). Прилади багато
спектрального сканування, що встановлюються на супутниках, дають змогу одержати
нформацію з роздільною здатністю близько 10 м, скануючи при цьому території розміром 60...185 км. Принцип дистанційного зондування за допомогою багато
спектрального сканера пояснюється на рис. 3.16. Перевага багатоспектральних
сканерів у здатності використовувати вузькі спектральні ділянки й отримувати
нформацію у цифровій формі.
Ці ділянки можуть бути або
широкими (близько 0,2 мкм), або вузькими (менше 0,01 мкм). Прилади багато
спектрального сканування, що встановлюються на супутниках, дають змогу одержати
нформацію з роздільною здатністю близько 10 м, скануючи при цьому території розміром 60...185 км. Принцип дистанційного зондування за допомогою багато
спектрального сканера пояснюється на рис. 3.16. Перевага багатоспектральних
сканерів у здатності використовувати вузькі спектральні ділянки й отримувати
нформацію у цифровій формі.
3.8.5 Теплові сенсори
Як відомо з курсу фізики, вс матеріали здатні посилати ІЧ випромінювання, що зумовлене молекулярним коливанням. Це теплове ІЧ випромінювання реєструється за допомогою техніки, схожої на багато спектральне сканування, але у діапазоні 8...14 мкм.
Характер зображення при цьому залежить від температури об’єкта та його здатності до випромінювання. Теплов сенсори, які встановлені на авіаносіях, що зондують об’єкти на невеликих висотах, забезпечують високу розрізняючу здатність (до 1 м), тоді як на супутниках теплові сенсори розділяють простори розмірами 700...900 м. Сучасн прилади теплового зондування здатні реєструвати різницю температур близько 0,4 К. Неоліки: 1) вплив метеорологічних умов на результати вимірювань; 2) зондуванню ґрунту піддається лише шар товщиною 2...4 см.
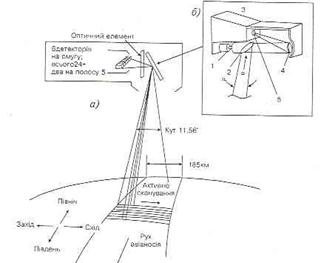
Рис. 3.16. Принцип дистанційного зондування за допомогою багатоспектрального сканера
3.8.6 Надвисокочастотні локатори
Цей вид техніки дистанційного зондування передбачає використання електромагнітних хвиль в області 0,1...2 м (що відповідає частотам від 100 МГц до 50 000 МГц). Надвисокочастотні (НВЧ) локаторні системи можуть бути активними (коли об’єкт дослідження опромінюється з подальшою реєстрацією відбитого випромінювання) і пасивні (коли реєструється природне випромінювання об’єкта). Принцип дії дистанційного зондування Землі (ДЗЗ) за допомогою локаторів полягає у випромінюванн діелектричних властивостей, що значною мірою залежать від вмісту вологи й температури ґрунту, нерівностей земної поверхні, рівня снігового покриву, типу рослинних покривів, і впливають на відбивальні та випромінювальні параметри, що вимірюються. НВЧ-локація надає змогу вивчати положення, рух та природу віддалених об’єктів. Основні типи локаторів, що застосовуються при ДЗЗ:
локатори зображення (вимірюють розсіяне випромінювання, висотоміри, НВЧ-радіометри);
локатор із синтетичною апертурою – ЛСА.
Завдяки високій проникност НВЧ-випромінювання повз хмари та листя, подібні локатори здатні створювати зображення земної поверхні у дрібних деталях (рис. 3.17).
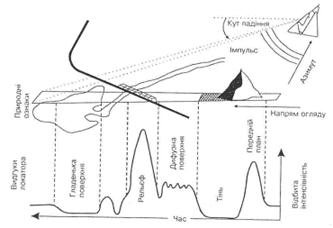
Рис. 3.17. Формування зображення за допомогою локатора
Об’єкти земної поверхн опромінюються локаторними імпульсами, що відбиваються, реєструються перетворюються у зображення. Амплітуда відбитого імпульсу залежить від конкретного об’єкта спостереження. Альтернативним локатору зображення є ЛСА. Принцип дії такого локатора наведено на рис. 3.18, де представлене взаємне положення літака з локатором та об’єкта спостереження. У точці 1 об’єкт знаходиться поза діаграмою опромінювання локатора; у точках 2 й 3 об’єкт потрапляє до цієї області; у точці 4 він знову зникає із зони спостереження локатора. Тобто об’єкт з’являється у системі реєстрації локатора лише протягом певного проміжку часу; під час цього проміжку відбитий сигнал заноситься у пам’ять бортового комп’ютера. Всі таким чином записані сигнали дають змогу реконструювати повну картину усіх об’єктів, що опромінюються локатором з досить вузькою апертурою (звідси й термін – “синтетична апертура”). Слід зауважити, що сигнали локатора, які надсилаються у процесі руху літака, набувають зсуву до високих частот, тоді як сигнали, що посилаються назад, набувають зсуву до низьких частот завдяки ефекту Допплера. Реєстрація та аналіз подібних зсувів надає можливості точно визначити просторове положення наземних об’єктів. Техніка локаторів із синтетичною апертурою досить складна й дорога, але її можливості зумовлюють най поширене застосування. Перевага – висока розрізнювальна здатність. Недолік істотні впливи рослинного покриву та нерівності ґрунту на сигнал, що реєструється.
3.9 Лазерні системи
ДЗЗ на основі лазерів полягає в опромінюванні об’єктів навколишнього середовища та реєстрації відбитого від об’єкту або розсіяного від нього лазерного випромінювання. Прилад для дистанційного зондування компонентів біосфери називають ЛІДАРом (від англійської фрази Light Detection And Ranging). Коротко познайомимося з основними типами лідарів.
3.9.1 Лідар на основі реєстрації зворотного розсіювання
Рівняння лідара. Зворотне розсіювання описується наступним рівнянням:
 (3.3)
(3.3)
де ![]() -
миттєва потужність, яка реєструється приймачем у момент часу
-
миттєва потужність, яка реєструється приймачем у момент часу ![]() ;
;
![]() -
потужність, що пропускається об’єктом у момент часу
-
потужність, що пропускається об’єктом у момент часу ![]()
![]() -
швидкість світла;
-
швидкість світла;
![]() -
тривалість імпульсу;
-
тривалість імпульсу;
![]() -
коефіцієнт об’ємного розсіювання атмосфери;
-
коефіцієнт об’ємного розсіювання атмосфери;
![]() -
дальність;
-
дальність;
![]() -
ефективна площа приймача;
-
ефективна площа приймача;
![]() -
коефіцієнт об’ємної інстинкції атмосфери.
-
коефіцієнт об’ємної інстинкції атмосфери.
Реєстрація рівня послаблення оптичного випромінювання лідара за його взаємодії з молекулами атмосфери або аерозолями дає змогу оцінити їх концентрацію.
Джерелом випромінювання у лідар
лазер, що генерує світлові імпульси. Якщо лазерний імпульс поширюється в
атмосфері до будь-якого об’єкта, то час ![]() проходження
мпульсом відстані
проходження
мпульсом відстані ![]() до об’єкта
назад до приймача дорівнює:
до об’єкта
назад до приймача дорівнює:
![]() (3.4)
(3.4)
де ![]() -
швидкість світла.
-
швидкість світла.
Реєстрація моменту сприйняття мпульсу приймачем дає змогу оцінити відстань до об’єкта.
Крім того, лазерний імпульс ма
певну тривалість ![]() . Якщо
припустити, що передній фронт імпульсу досягає об’єкта на відстані
. Якщо
припустити, що передній фронт імпульсу досягає об’єкта на відстані ![]() то задній фронт імпульсу в
цей час буде на відстані
то задній фронт імпульсу в
цей час буде на відстані ![]() Співвідношення
між
Співвідношення
між ![]()
![]() часом
часом ![]() та часом
та часом ![]() реєстрації імпульсу мають
вигляд:
реєстрації імпульсу мають
вигляд:
 (3.5)
(3.5)
Звідси розмір ![]() об’єкта визначається за
виразом:
об’єкта визначається за
виразом:
![]() (3.6)
(3.6)
Коефіцієнт об’ємно
нстинкції ![]() атмосфери
частка падаючої енергії, на яку вона зменшується при проходженні одиниц
довжини атмосфери. Одиниця вимірювання
атмосфери
частка падаючої енергії, на яку вона зменшується при проходженні одиниц
довжини атмосфери. Одиниця вимірювання ![]() -
-
![]() Поглинання
лазерного променя молекулярним газом (забрудненням) можна оцінити так:
Поглинання
лазерного променя молекулярним газом (забрудненням) можна оцінити так:
![]() 3.7)
3.7)
де ![]() -
коефіцієнт поглинання, що випромінюється в (млн.-1*см)-1;
-
коефіцієнт поглинання, що випромінюється в (млн.-1*см)-1;
![]() -
число Лошмідта (2,69*1019 см-3) – густина молекул газу в
атмосфері за нормальних умов;
-
число Лошмідта (2,69*1019 см-3) – густина молекул газу в
атмосфері за нормальних умов;
![]() -
переріз поглинання (см2).
-
переріз поглинання (см2).
У реальних ситуаціях (на рівні моря при 0 0С) коефіцієнт об’ємної інстенкції дорівнює:
![]() см-3
см-3![]() (млн.*см)-1. (3.8)
(млн.*см)-1. (3.8)
Коефіцієнт об’ємного
розсіювання ![]() атмосфери
визначається як частка падаючої енергії, що розсіюється в одиничному тілесному
куті в обертальному напрямку на одиниці атмосферної довжини. Одиниця
вимірювання
атмосфери
визначається як частка падаючої енергії, що розсіюється в одиничному тілесному
куті в обертальному напрямку на одиниці атмосферної довжини. Одиниця
вимірювання ![]() - м-1*ср-1.
- м-1*ср-1.
Пружне розсіювання оптичного випромінювання можна представити двома основними типами – розсіюванням Релея розсіюванням Мі:
![]() (3.9)
(3.9)
де ![]() -
коефіцієнт розсіювання Релея;
-
коефіцієнт розсіювання Релея;
![]() -
коефіцієнт розсіювання Мі.
-
коефіцієнт розсіювання Мі.
Коефіцієнт розсіювання Релея визначають за виразом:
![]() (3.10)
(3.10)
де ![]() -
довжина хвилі, нм.
-
довжина хвилі, нм.
Приклад 3.1
Розрахувати коефіцієнт розсіювання Релея під час проходження в атмосфері випромінювання рубінового лазера, довжина хвилі якого дорівнює 694,3 нм.
Розв’язок
Підставимо числові дані у рівняння (3.10):
![]()
Контрольне завдання № 3.1
Визначити потужність лазерного
випромінювання, яка реєструється фотоприймачем лідара на основі рубінового
лазера з такими параметрами: ![]() нм,
нм, ![]() Вт,
Вт, ![]() мкс,
мкс, ![]() м2,
м2, ![]() км,
км, ![]() км-1.
км-1.
Коефіцієнт розсіювання Мі можна знайти за допомогою рівняння:
![]() (3.11)
(3.11)
де ![]() для
видимості
для
видимості ![]() км та
км та ![]() для середньої видимості,
якщо
для середньої видимості,
якщо ![]() вимирюється в м-1,
вимирюється в м-1,
![]() - в м,
- в м, ![]() - в нм.
- в нм.
Приклад 3.2
Визначити коефіцієнт розсіювання Мі випромінювання рубінового лазера з довжиною хвилі 694,3 нм, якщо видимість становить 10 000 м.
Розв’язок.
Знаходимо показник ступеня ![]() :
:
![]()
Підставимо числові дані у рівняння (3.11):
 м-1.
м-1.
Контрольне завдання № 3.2
Визначити коефіцієнт розсіювання Мі випромінювання лазера з довжиною хвилі 300б1 нм, якщо видимість становить 5 км.
Відповідь: 1,43 км-1.
Коефіцієнт об’ємного зворотного розсіювання характеризує частку випромінювання, яке після розсіювання прямує по траєкторії лазерного променя. Зворотне розсіювання також має дві компоненти – Релея та Мі.
Коефіцієнт об’ємного зворотного розсіювання Релея визначається за виразом:
![]() (м-1ср-1).
(3.12)
(м-1ср-1).
(3.12)
Коефіцієнт об’ємного зворотного розсіювання Мі визначається за виразом:
![]() (м-1ср-1).
(3.13)
(м-1ср-1).
(3.13)
Повний коефіцієнт об’ємного зворотного розсіювання визначається як сума обох коефіцієнтів:
![]() (3.14)
(3.14)
Приклад 3.4
Знайти повний коефіцієнт зворотного розсіювання випромінювання рубінового лазера (694,3 нм) на відстані 2 км.
Розв’язок
Коефіцієнт розсіювання Релея визначимо на підставі рівняння (3.10):

Коефіцієнт розсіювання Мі визначимо за допомогою рівняння (3.11):
![]()
 м-1.
м-1.
Визначимо коефіцієнти зворотного розсіювання Релея й Мі:
![]() м-1ср-1;
м-1ср-1;
![]() м-1ср-1.
м-1ср-1.
Звідси повний коефіцієнт зворотного розсіювання дорівнює:

Приклад 3.5
Визначити потужність лазерного
випромінювання, яка реєструється фотоприймачем лідара на основі рубінового
лазера з такими параметрами: ![]() нм,
нм, ![]() Вт,
Вт, ![]() мкс,
мкс, ![]() м2,
м2, ![]() км,
км, ![]() км-1.
км-1.
Розв’язок. Вважаючи середовище, що аналізується, однорідним, можна припустити, що:
Підставляємо числові значення в останній вираз:
![]() Розраховуємо
тілесний кут:
Розраховуємо
тілесний кут:
![]() ср.
ср.
Знаходимо параметр ![]()
![]()
Визначаємо коефіцієнт об’ємного розсіювання:

Обчислюємо коефіцієнт об’ємного зворотного розсіювання:
![]() км-1ср-1.
км-1ср-1.
Звідки

Контрольне завдання № 3.3
Визначити потужність випромінювання
лазера на фарбниках, що застосовуються для дистанційного зондування туману (![]() =0,5 км-1), якщо
=0,5 км-1), якщо
![]() ним,
ним, ![]() Вт,
Вт, ![]() мкс,
мкс, ![]() см2,
см2, ![]() км.
км.
Відповідь: 3*10-11 Вт.
3.9.2 Лідар на основі реєстрації диференційного поглинання
Метод ґрунтується на реалізац
стотної залежності коефіцієнта об’ємної екстинкції від довжини світлост
хвилі. В основу роботи диференційного лідара покладено принцип опромінювання
об’єкта, що контролюється, світлом із різними довжинами хвиль. Випромінювання з
однією довжиною хвилі![]() , що збігається з
лінією поглинання об’єкта (газу чи забруднення), поглинається об’єктом, тоді як
випромінювання з іншою довжиною хвилі
, що збігається з
лінією поглинання об’єкта (газу чи забруднення), поглинається об’єктом, тоді як
випромінювання з іншою довжиною хвилі ![]() ,
далекою від лінії поглинання, набуває пружного розсіювання (рис. 3.18).
Критерієм оцінки забруднення атмосфери є відношення сигналів, що реєструються
на обох довжинах хвиль. Лідар такого типу отримав в англомовній літератур
назву DIAL (Differential Absorption Lidar) або DAS
(Differential Absorption and Scattering).
,
далекою від лінії поглинання, набуває пружного розсіювання (рис. 3.18).
Критерієм оцінки забруднення атмосфери є відношення сигналів, що реєструються
на обох довжинах хвиль. Лідар такого типу отримав в англомовній літератур
назву DIAL (Differential Absorption Lidar) або DAS
(Differential Absorption and Scattering).
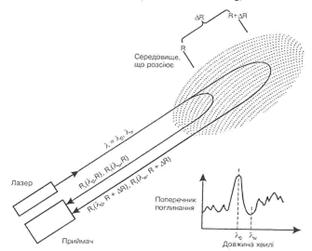
Рис. 3.18. Принцип д лідара на основі реєстрації диференційного поглинання
Мінімальна концентрація газу чи забруднювача, що вимірюється методом реєстрації диференційного поглинання, визначається за виразом:
![]() (3.15)
(3.15)
де ![]() -
переріз диференційного поглинання, а величина
-
переріз диференційного поглинання, а величина ![]() описується
рівнянням:
описується
рівнянням:
![]() (3.16)
(3.16)
Для практичних обчислень залежно
від того, в яких одиницях вимірюється концентрація ![]() використовуються
наступні вирази:
використовуються
наступні вирази:
![]() (3.17)
(3.17)
![]() (3.18)
(3.18)
![]() (3.19)
(3.19)
В останньому виразі ![]() називають коефіцієнтом
диференційного поглинання
називають коефіцієнтом
диференційного поглинання ![]() який
можна пов’язати з
який
можна пов’язати з ![]() (см2)
виразом:
(см2)
виразом:
![]() (3.20)
(3.20)
де ![]() см-3*атм-1
густина молекул в атмосфері на рівні моря при температурі 0 0С,
або:
см-3*атм-1
густина молекул в атмосфері на рівні моря при температурі 0 0С,
або:
![]() (3.21)
(3.21)
Приклад 3.6
Визначити мінімальну концентрацію
молекул ![]() , якщо
, якщо ![]() а
а ![]() м. Коефіцієнт
диференційного поглинання
м. Коефіцієнт
диференційного поглинання ![]() становить
становить
![]() см-1*атм-1.
см-1*атм-1.
Розв’язок
Підставимо числові дані у вираз (3.19):

Контрольне завдання № 3.4
Визначити коефіцієнт диференційного
поглинання ![]() (см-1*атм-1)
озоном випромінювання з довжиною хвилі 0,29 мкм, якщо
(см-1*атм-1)
озоном випромінювання з довжиною хвилі 0,29 мкм, якщо ![]()
![]() км і
км і ![]() млн.-1*атм-1.
млн.-1*атм-1.
Відповідь: 12,5 см-1*атм-1.
3.9.3 Допплерівський лідар
Суть ефекту Допплера поляга
в тому, що при опромінюванні об’єкта, який рухається із швидкістю ![]() , світлом певної довжини
хвилі
, світлом певної довжини
хвилі ![]() відбувається розсіювання
світла, причому частота (довжина хвилі) розсіяного світла залежить від
швидкості руху об’єкта. Допплерівський зсув
відбувається розсіювання
світла, причому частота (довжина хвилі) розсіяного світла залежить від
швидкості руху об’єкта. Допплерівський зсув ![]() частоти
світла залежить від кута розсіювання
частоти
світла залежить від кута розсіювання ![]() світла
об’єктом, швидкості руху
світла
об’єктом, швидкості руху ![]() об’єкта
та від кута
об’єкта
та від кута ![]() між напрямком швидкості й
напрямком поширення світла.
між напрямком швидкості й
напрямком поширення світла.
Допплерівський зсув ![]() частоти світла визначають
за виразом:
частоти світла визначають
за виразом:
![]() (3.22)
(3.22)
Приклад 3.7
Визначити швидкість руху частинок
аерозолю під впливом вітру таких параметрів допплерівського розсіювання: ![]() Гц,
Гц, ![]() Гц,
Гц, ![]() ,
, ![]()
Розв’язок
Використовуючи формулу (3.22), отримуємо:
Контрольне завдання 3.5
Визначити величину допплерівського
зсуву, що реєструється при опромінюванні краплин дощу, для таких параметрів: ![]() нм,
нм, ![]() ,
, ![]() ,
, ![]() м*с-1.
м*с-1.
Відповідь: 9,4*106 Гц.
3.9.4 Лідар на основі реєстрації флуоресценції
Багато компонентів атмосфери демонструють здатність флуоресціювати. Методи флуоресцентного лазерного зондування надто чутливі через малі тиски атмосфери, при яких відсутн зіткнення молекул, що гасять флуоресценцію.
3.9.5 Лідар на основі реєстрації комбінаційного розсіювання
Якщо розсіювання світла речовиною супроводжується помітною зміною частоти світла, що розсіюється, то його називають комбінаційним (або романівським). Цей тип розсіювання оптичного випромінювання містить втрату або одержання кванта коливально енергії молекулою. Йдеться про непружне світлове розсіювання, коли фотон, що падає, має енергію значно більшу, ніж енергія, яку коливальний квант втрачає за збудження молекули; залишок енергії розсіюється як фотон зі зменшеною частотою. Перевагою методу є те, що спектральні комбінаційні зсуви специфічні для кожно молекули; інтенсивність кожної лінії пропорційна концентрації кожного компонента; вузькі спектральні лінії та комбінаційні зсуви обмежують вплив прямого та розсіяного випромінювання; метод характеризується просторовим часовим розподіленням. Недолік: малий поперечник розсіювання, що потребує використання потужних лазерів та складних колімаційних систем.
3.9.6 Застосування дистанційного зондування
Реєстрація ![]() випромінювання да
можливість за допомогою оцінки рівня його послаблення визначати вологість
рунту, наявність або кількість снігу на поверхні. Недолік: обмежене
просторове розділення та можливість вимірювань лише на невеликих висотах
польоту авіаносія.
випромінювання да
можливість за допомогою оцінки рівня його послаблення визначати вологість
рунту, наявність або кількість снігу на поверхні. Недолік: обмежене
просторове розділення та можливість вимірювань лише на невеликих висотах
польоту авіаносія.
Фотографічні та відеографічні системи застосовують для визначення типів структури ґрунтів, аналізу стану рослинних покривів, спостереження за дренажними системами, оцінки характеру морських поверхонь. Завдяки використанню фотографічних систем можна отримати інформацію щодо просторового розподілу седиментів, характеру ерозійних процесів, викиду забруднень та стічних вод з труб.
Багатоспектральн сканери використовують для аналізу земно поверхні, рослинних покривів, картографії, визначення вологості ґрунту, оцінок рослинної біомаси, снігових покривів, непрохідних просторів, кольору океану.
Теплові сенсори знаходять застосування при визначенні рівня теплового забруднення водойм, оцінок розмірів, температури рослинних покривів та впливу на них зовнішніх факторів, вологості ґрунту, теплових аномалій, температури та стану поверхні водойм, морських течій, льодових та снігових масивів, вулканічної діяльності, дренажних структур, термічних індустріальних викидів. Широкого застосування набула техніка дистанційного зондування теплового ІЧ випромінювання для аналізу ландшафтних екологічних процесів – вимірювання випаровування, еватранспірац та вологості ґрунту, вивчення характеристик теплового балансу та теплових потоків, оцінки теплообміну між лісовими масивами.
Надвисокочастотні (НВЧ) локатори дають можливість вимірювати характеристики ґрунтів (нерівність, структуру, вологість), рослинних покривів та опадів, оцінювати водні ресурси, стан морської поверхні, прогнозувати наближення цунамі, визначати типи та розміри льодових масивів, аналізувати характер упаковки снігу. Прикладами застосування РЛС техніки є дистанційне спостереження за блискавкою (рис. 3.19) та дистанційний контроль за повенями (рис. 3.20).
Лазерні системи використовують для дистанційного зондування атмосфери, зокрема визначення висоти хмар, дослідження структури й властивостей хмар, вимірювання параметрів вітру, вимірювання вологості й температури повітря, оцінки опадів. Лазерні системи, встановлені на борту авіаносія чи супутника, здатні проводити топографічн вимірювання на земній поверхні, оцінювати рослинні покриви, водяні потоки, ерозійні процеси.
Лазерний диференційний лідар застосовують для дослідження розподілу забруднень над промисловими підприємствами, визначення озону.
Допплерівський лідар використовують для вимірювання параметрів вітру та опадів.
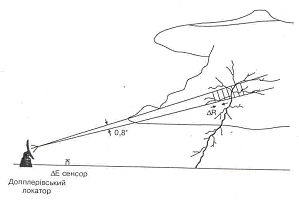
Рис. 3.19. Дистанційне спостереження за блискавкою за допомогою радіолокатора
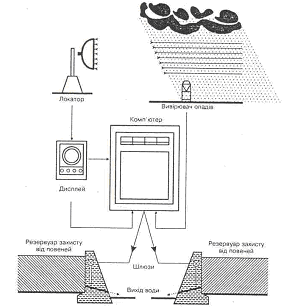
Рис. 3.20. Дистанційне спостереження за повенями за допомогою радіолокатора
Лідар на основ комбінаційного розсіювання може бути застосований для визначення наявності та кількісної оцінки атмосферних молекул (Н2О, SO2, CO2, CO, NO, C2H4 та н.). Слід також відзначити можливість дослідження об’єктів, що знаходяться у рідкому стані або містять у собі воду; за допомогою методів спектроскоп комбінаційного розсіювання вимірювати температури поверхні водойм.
IV. ПИТАННЯ ДЛЯ КОНТРОЛЮ ЗНАНЬ
4.1 Питання з розділу І
Що вивчає науковий напрямок космоекологія”?
Дайте визначення поняттю моніторинг” та наведіть його ієрархічні рівні.
Чому провідна роль в реалізац аерокосмічного моніторингу має належати знімкам, що виконуються в оптичному діапазоні спектру?
Якими можуть бути науково-дослідн КА за призначенням?
Які науково-дослідні КА відносять до пілотованих?
Які науково-дослідні КА відносять до автоматичних?
Як класифікують супутники зв’язку за принципом роботи?
Наведіть види пасивних штучних супутників зв’язку.
Визначте основні напрямки створення орбітальних супутникових систем зв’язку.
Для чого призначені метеосупутники?
Для чого здійснюють нефаналіз хмарності?
Які системи з використанням супутників використовують для глобального прогнозування та регіонального аналізу?
Зобразіть та прокоментуйте роботу блок-схеми централізованої системи метеоспостережень з використанням ШСЗ.
Зобразіть, прокоментуйте та порівняйте з централізованою роботу блок-схеми автономної системи метеоспостережень з використанням ШСЗ.
Як відшукати в першому наближенн швидкість прецесії висхідного вузла орбіти?
Яким може бути кут нахилу сонясно-синхронної орбіти?
Які орбіти найбільш придатні для фіксування швидкоплинних атмосферних явищ (вихорових шквалів, грозових областей тощо)?
Як можна оцінити зону єфективного зв’язку зіз ШСЗ?
Наведіть формулу для визначення частоти проходження ШСЗ повз зону ефективного зв’язку.
Які способи визначення місцеположення об’єкта ви знаєте?
Зобразіть та прокоментуйте схему побудови навігаційної системи з використанням ШСЗ.
Для чого призначені геодезичні ШСЗ?
Поясніть призначення високоточних фототеодолітних установок.
У яких системах використовуються радіолокаційн вимірювання дальності?
Які орбіти є найоптимальнішими для геодезичних ШСЗ?
Назвіть області використання КА для розвідки земних ресурсів.
Які орбіти є найоптимальнішими для природоресурсних супутників?
Проаналізуйте схему еволюції КА для дослідження природних ресурсів Землі.
У чому полягають особливості будови КА для міжпланетних польотів?
Порівняйте умови життя на Земл Місяці.
4.2 Питання з розділу ІІ
Назвіть основні типи космічно зйомки поверхні Землі.
Для чого використовують великомасштабн космічні знімки?
Перелічіть недоліки космічно фотозйомки.
Як здійснюється космічна сканерна зйомка?
Назвіть складові системи для космічної сканерної зйомки.
У чому полягає мета використання високооператвної сканерної зйомки високого розрізнення?
Як визначити при надірній зйомц смугу огляду оптичних датчиків високого розрізнення?
Порівняйте системи “Спот” і “Терс”.
У чому полягають переваги електронного сканування?
Назвіть режими роботи площинних камер HRV.
Наведіть переваги та недоліки системи, що базується на прямій геосинхронній орбіті, у порівнянні з системою моніторингу, що ґрунтується на сонячно-синхронних орбітах.
У чому полягає специфіка космічно зйомки високого розрізнення?
Наведіть особливості космічно зйомки високого розрізнення.
Що називають номінальним періодом зйомки?
Як здійснюється ймовірна оцінка впливу хмарності на якість космічної фотозйомки?
Які задачі притаманні для одноразової космічної зйомки малої ділянки місцевості?
У чому полягає призначення КА Океан-О”?
У чому полягає роль космічно нформації для вирішення завдань землекористування та природо охорони?
Що дає екологам геоекологічне дешифрування матеріалів сучасних багатозональних космічних зйомок та їх нтерпретація з геолого-картографічними даними на урбанізовані території?
Як за допомогою космічних фотознімків визначається картування глибин рівнів ґрунтових вод та зон підтоплення?
Яке значення для екології ма вивчення геодинамічних зон?
Що таке лінеаменти?
Як за допомогою космічних знімків визначають техногенні зміни сучасних ландшафтів?
Прокоментуйте визначення фітосанітарного стану та пожежонебезпечності лісів на прикладі Зони відчуження ЧАЕС.
Що дає фахівцям-екологам картування ділянок підвищеної природної пожежобезпечності?
Яке значення ма дистанційно-космічний моніторинг земної поверхні для вивчення рослинності?
4.3 Питання з розділу ІІІ
Назвіть основні напрямки розвитку енергетичної інфраструктури у космосі?
Сформулюйте основні завдання космічної екології.
Що означає поняття ракетно-космічний комплекс”?
Наведіть основну класифікацію та характеристики ракет-носіїв.
Перелічіть фактори техногенного впливу космічних польотів на довкілля.
Проаналізуйте вплив ракетно-космічної техніки на озоновий шар Землі.
Як впливають пуски ракет-носіїв на оносферу Землі?
Що означає поняття “космічне сміття”?
Зформулюйте існуючі недоліки збору нформації з агромоніторингу.
У чому полягає функціональне призначення галузевої системи комплексної обробки аерокосмічної та наземно нформації (ГІСКОАНІ)?
Перелічіть об’єкти досліджень ГІСКОАНІ.
Зформулюйте вимоги до функціонування системи моніторингу.
Що є необхідною умовою функціонування АКП і ТД?
Що містить паспорт АКП?
СКОРОЧЕННЯ
АКП – аерокосмічний полігон.
АМС – автоматична міжпланетна станція.
БІСУ – бортова інформаційна система уніфікована.
ВПК – військово-промисловий комплекс.
ДЗЗ – дистанційне зондування Землі.
ІЧ – інфрачервоний.
КА – космічні апарати.
КК – космічний корабель.
КСЗ – космічна сканерна зйомка.
НАНУ – Національна Академія Наук України.
НТ – навігаційна точка.
ОБС – орбітальна база-станція.
ОК –орбітальний корабель.
ОЛ – орбітальна лабораторія.
ОПС – орбітальна пілотована станція.
ОС – орбітальна станція.
ОШП – об’єкти штучного походження.
ПЗЗ –прилад із зарядовим зв’язком.
РКК- ракетно-космічний комплекс.
РЛС – радіолокаційна станція.
РН – ракета-носій.
РТВК- радіотелевізійний комплекс.
ТД – тестова ділянка.
УФ – ультрафіолетовий.
ЦАКЗД – центральне агентство з дистанційного зондування.
ШСЗ – штучний супутник Землі.
ШСС – штучний супутник Сонця.
ЛІТЕРАТУРА
1. Багмет А.П., Войцицький А.П. Військова екологія: Навчальний посібник. Житомир: ДАУ, 2004. – 155 с.
2. Обробка результатів вимірювань параметрів навколишнього середовища: методичний посібник / А.П. Войцицький, А.П. Багмет, М.В. Зосимович, В.О.Зінченко. Житомир: ДАУ, 2004. – 87 с.
3. Варваров Н.А. Популярная космонавтика.– М.: Машиностроение, 1981. – 128 с.
4. Войцицький А.П. Методи вимірювання параметрів навколишнього середовища: Методичний посібник. – Житомир: ДАУ, 2003. – 58 с.
5. Грихилес В.А., Орлов П.П., Попов Л.Б. Солнечная энергия и космические полеты. – М.: Наука, 1984. – 216 с.
6. Гришин Ю.И. Искусственные космические экосистемы. – М.: Знание, 1989. – 64 с., ил. (Новое в жизни, науке, технике. Сер. «Космонавтика, астрономия», № 7.
7. Евич А.Ф. Индустрия в космосе. – М.: Московский рабочий, 1978. – 224 с.
8. Зосимович М.В. Аналіз використання Російський штучних супутників Землі для розв’язання задачі моніторингу навколишнього природного середовища// Матеріали V міської міжуніверситетської наукової конференц викладачів, студентів і молодих вчених, 14-15 Травня 2002 р. Житомр: ЖІТІ, с.75-76.
9. Зосимович М.В. Концепція виведення радіоактивних відходів АЕС в далекий космос.// Науковий збірник Житомирської філії МАУП. Додаток 1 до журналу «Персонал».– Житомир: Вид-во «Волинь», 1999, с. 114-115.
10. Зосимович М.В. Обґрунтування параметрів космічно системи моніторингу Землі./ Матеріали IV Міжнародної науково-практичної конференції “Сучасн технології в аерокосмічному комплексі”, 7-9 вересня 1999 р., Житомирський нженерно-технологічний інститут. – Житомир: ЖІТІ, с.170-173.
11. Зосимович М.В., Борисюк Б.В., Левчук С.В., Загородній Ю.В. Розробка проекту утилізац радіоактивних відходів в далекий космос (Частина 1). Державна реєстрація № 0100U004196. – Житомир, ДААУ, 2000.- 40 с.
12. Зосимович М.В., Войцицький А.П. Аналіз характеристик авіаційно техніки як засобу екологічного моніторингу навколишнього природного середовища в Україні// Всеукраїнська конференція молодих вчених (студентів, аспірантів, викладачів) “Біорізноманіття як ключовий елемент збалансованого розвитку: регіональний аспект”, присвячена 90-річчю МДУ, 30-31 жовтня 2003 р., Миколаїв, Інститут екології (Південна філія).
13. Зосимович М.В., Костянюк О.В., Шелудченко І.A., Войцицький А.П. Розробка проекту утилізації радіоактивних відходів в далекий космос. (Частина 2): Еколого-технологічний аналіз використання схеми ядерної газотурбінної енергетичної установки. Державна реєстрація № 0100U004196. – Житомир, ДААУ, 2001.- 51 с.
14. Зосимович М.В., Троянський О.І. Методичні рекомендації щодо підготовки та оформлення курсового проекту з курсу ,,Моделювання та прогнозування стану довкілля”. Житомир: Лабораторія моделювання та аеросистемних досліджень ДАУ, 2004. – 24 с.
15. Зосимович М.В., Шелудченко Б.А., Войцицький А.П. Еколого-економічне обґрунтування проекту утилізації радіоактивних відходів в далекий космос при міжнародній співпраці.// Вісник Сумського державного аграрного університету. Суми: вид-во “Козацький вал”, Т. 1, 2001. с. 75-80.
16. Зосимович М.В., Якименко В.С. Розрахункове дослідження СТРкРУ як засобу утилізац апарата з РАВ на високі орбіти.// Матеріали ІІІ Міжнародної науково-практично конференції “Динаміка наукових досліджень, 2004”. Том 64. Технічні науки. Дніпропетровськ: Наука і освіта, 2004.- с.12-14.
17. Зосимович М.В., Якименко В.С., Прохоров К.С., Філоненко І.Л. Розробка проекту утилізації радіоактивних відходів в далекий космос. (Частина 3): Розрахункове дослідження СТРкРУ як засобу утилізації апарату з РАВ з низької опорної орбіти на більш високі. Державна реєстрація № 0100U004196. – Житомир, ДААУ, 2004.- 22 с.
18. Зосимович Н. Использование сельскохозяйственной авиации в Украине для решения задач экологического мониторинга и рационального использования природных ресурсов // Авиация общего назначения, № 4, 2004 г., с. 12-16. Харьков: АОН.
19. Зосимович Н.В. Использование Российских ИСЗ для решения задач экологического мониторинга земной поверхности.// IV Международная научная конференция молодых ученых. «Человек и космос»: Сборник тезисов. – Днепропетровск: НЦАОМУ, 2002, с. 323.
20. Зосимович Н.В. Определение характеристик и разработка математической модели параметров транспортных возмущений КА экологического мониторинга Земли.// Матеріали І
21. Міжнародно науково-практичної конференції “Науковий потенціал світу 2004”, 1-15 листопада 2004 р. Том 61. Технічні науки. Дніпропетровськ: Наука і освіта, 2004.- с.68-72.
22. Зосимович Н.В. Оценка эффективности системы аварийной защиты разгонного блока с ядерной энергоустановкой. // Людина і космос. Збірник наукових праць. – К.: ІВЦ Держкомстату України, 2003. – с. 169-175.
23. Зосимович Н.В., Козлов A.A., Бек M.А. Предварительная экономическая оценка решения задачи удаления радиоактивных отходов в космос// Науковий збірник Житомирсько філії МАУП. Додаток № 1 до журналу «Персонал».– Житомир: Вид-во «Волинь», 1999.-C. 107-110.
24. Зосимович Н.В., Шелудченко Н.Б. Микроспутник экологического назначения.// Всеукраинская научно-практическая конференция «Микроспутники перспектива и реальность», 23-25 июня 2004 г., Национальный центр управления и испытания космических аппаратов, Евпатория, Украина.
25. Инженерный справочник по космической технике. Изд. 2-е перераб. и доп. Под ред А.В. Солодова. М.: Воениздат, 1977. 430 с., ил.
26. Кац Я.Г., Рябухин А.Г. Космическая геология. – М.: Просвещение, 1984. – 80 с.
27. Космос-Україні. Атлас тематично дешифрованих знімків території України з українсько-російського космічного апарата “Океан-О” та інших космічних апаратів./ Під редакцією В.ІФ. Лялька і О.Д. Федоровського. – К.: НКАУ, 2001.-106 с.
28. Котляр О.Л. Комплексування даних дистанційного зондування в НВЧ- і оптичному діапазонах при визначенні вологості ґрунтів і рівня ґрунтових вод. / Нов методи в аерокосмічному землезнавстві. – К.: ЦАКДЗ НАНУ, 1999. – с. 96-105.
29. Левантовский В.И. Механика космического полета в элементарном изложении, 3- е изд., перераб . и дополн. – М.: Наука, 1980. – 512 с.
30. Лялько В.И., Сахацкий А.И., Ходоровский А.Я. Интеркалибровка разновременных многозональных космических снимков для экологического мониторинга (на примере исследований зоны влияния аварии на ЧАЭС). // Космічна наука і технологія. – К.: НАНУ, том 3, №3/4, 1997, с. 54-58.
31. Лялько В.И., Сахацкий А.И., Ходоровский А.Я. Экологический мониторинг окружающей среды по многозональным космическим сниткам // Космічна наука і технологія. – К.: НАНУ, 1999, т. 5, №4.-с.1-3.
32. Лялько В.І. Сучасний стан космічного землезнавства перспективи його розвитку. Нові методи в космічному землезнавстві. Методичний посібник по тематичній інтерпретації матеріалів аерокосмічних зйомок. – К.: ЦАКДЗ ІГН НАНУ. – 1999.-с.6-18.
33. Лялько В.І., Сахацький А.І., Ходоровський А.Я., _агато О.Т. Застосування ГІС-технологій для вивчення екології лісних масивів за багатозональними космічними знімками (на прикладі зони відчуження ЧАЕС). Матеріали ГІС-форуму-99. К.: ГІС-Асоціація України. Київ 9-11 листопада 1999. – 263 с.
34. Новиков Л.С. и др. Экологические аспекты космонавтики. / Л.С. Новиков, Н.Н. Петров, Ю.А. Романовский. – М.: Знание, 1986. – 64 с., ил. – (Новое в жизни, науке, технике. Сер. «Космонавтика, астрономия», № 5.
35. Подшивалов С.А., Иванов Э.А., Муратов Л.И. Энергетические установки космических аппаратов. М.: Энергоатомиздат, 1981. – 200 с.
36. Посудін Ю.І. Методи вимірювання параметрів навколишнього середовища. – К.: Світ, 2003. 285 с.
37. Пустовойтенко В.В., Малиновский В.В. Некоторые особенности обработки информации спутниковой радиолокационной станции
38. Системн дослідження та моделювання в землеробстві. // Зб. Наук. Праць. – К.: Нива, 1998. – 409 с.
39. Тимнат И. Ракетные двигатели на химическом топливе: Пер. с англ. – М.Мир, 1990. – 294 с., ил.
40. Федоровский А.Д., Суханов К.Ю., Якимчук В.Г. К вопросу оценки космических снимков для дешифрирования природных ландшафтов. // Космічна наука і технологія. – К.: НАНУ, 1999, т.5, №1. – с.24-31.
41. Шевченко А.О., Луцкін В.І., _агато сп О.В. Технологія та технічне забезпечення аерокосмічних методів діагностики сільськогосподарських об´єктів.// Тез. Доп. Та вист. Наук.-практ. Конф. “Інженерні проблеми сільськогосподарського виробництва Украіни”.-К.:АІН,УААН Украіни, 1994. – с. 231-232.
42. Шульц С.С. мл. Земля из космоса. – Л.: Недра, 1984.- 114 с.
43. Эрике К. Будущее космической индустрии. – М.: Машиностроение, 1979. – 200 с.
44. Lyalko V.I., Sakhatsky A.I., Marek K.H., Oppitz S. Application of the GIS “Trias” for remote ecological monitoring within the disaster zone of Chernobyl. Workshop on Pollution Monitoring and GIS. Brandys and Labem, Gzech Republic, 1995.
45. Zosimovitch N. Space Monitoring of a Terrestrial Surface// Вісник Державної агроекологічної академії України. Спеціальний випуск, жовтень, 2000, Вид-во ДААУ, с. 319-320.
© 2010 Интернет База Рефератов