
Рефераты по сексологии
Рефераты по информатике программированию
Рефераты по биологии
Рефераты по экономике
Рефераты по москвоведению
Рефераты по экологии
Краткое содержание произведений
Рефераты по физкультуре и спорту
Топики по английскому языку
Рефераты по математике
Рефераты по музыке
Остальные рефераты
Рефераты по авиации и космонавтике
Рефераты по административному праву
Рефераты по безопасности жизнедеятельности
Рефераты по арбитражному процессу
Рефераты по архитектуре
Рефераты по астрономии
Рефераты по банковскому делу
Рефераты по биржевому делу
Рефераты по ботанике и сельскому хозяйству
Рефераты по бухгалтерскому учету и аудиту
Рефераты по валютным отношениям
Рефераты по ветеринарии
Рефераты для военной кафедры
Рефераты по географии
Рефераты по геодезии
Рефераты по геологии
Рефераты по геополитике
Рефераты по государству и праву
Рефераты по гражданскому праву и процессу
Рефераты по делопроизводству
Рефераты по кредитованию
Рефераты по естествознанию
Рефераты по истории техники
Рефераты по журналистике
Рефераты по зоологии
Рефераты по инвестициям
Рефераты по информатике
Исторические личности
Рефераты по кибернетике
Рефераты по коммуникации и связи
Курсовая работа: Розробка схеми електричної принципової МР3 програвача – приставки до ПК
Курсовая работа: Розробка схеми електричної принципової МР3 програвача – приставки до ПК
Міністерство освіти і науки України
ДЕРЖАВНИЙ ВИЩИЙ НАВЧАЛЬНИЙ ЗАКЛАД
«КИЇВСЬКЙ НАЦІОНАЛЬНИЙ ЕКОНОМІЧНИЙ УНІВЕРСИТЕТ ІМЕНІ ВАДИМА ГЕТЬМАНА»
РОМЕНСЬКИЙ КОЛЕДЖ
Спеціальність: 5.091504 «Обслуговування комп’ютерних та інтелектуальних систем та мереж»
Курсовий проект з предмету:Мікропроцесорн системи
Тема: «Розробити схему електричну принципову МР3 програвача – приставка до ПК»
Виконав:
студент гр. К 3-2
Харченко Є.С.
Перевірив
викладач
Шокота Т.А.
2007
Зміст
Вступ
1 Загальний розділ
1.1 Призначення проектуємого пристрою
1.2 Технічні характеристики
1.3 Розробка і обґрунтування схеми електричної структурної
2 Спеціальний розділ
2.1 Вибір і обґрунтування елементно бази
2.2 Принцип роботи окремих ВІС з використанням часових діаграм та алгоритмів роботи
2.3 Принцип роботи пристрою згідно схеми електрично принципової
3 Експлуатаційний розділ
3.1 Ініціалізація програмуємих ВІС
3.2 Тест перевірки окремих вузлів або пристроїв
3.3 Розрахунок надійності пристрою
4 Анотація
5 Література
Вступ
Мікропроцесор це пристрій, який здійснює прийом, обробку і видачу інформації. Конструктивно МП містить одну або декілька інтегральних схем і виконує дії за програмою, записано в пам'ять.
Мікропроцесорна система – обчислювальна, контрольно-вимірювальна або керуюча система, в якій основним пристроєм обробки інформації є МП. Мікропроцесорна система будується з набору мікропроцесорних ВІС.
Мікропроцесори за призначенням поділяють на універсальні і спеціалізовані.
Універсальними мікропроцесорами є МП загального призначення, які розв’язують широкий клас задач обчислення, обробки та керування.
Спеціалізован мікропроцесори призначені для розв’язання задач лише певного класу. До спеціалізованих МП належать: сигнальні, медійні та мультимедійні.
Мікропроцесорний комплект (МПК) – сукупність інтегральних схем, сумісних за електричними, нформаційними параметрами, призначених для побудови електронно-обчислювально апаратури та мікропроцесорних систем керування.
За кількістю ВІС у МПК розрізняють багатокристальні МПК і однокристальн мікроконтролери. До багатокристальних комплектів відносять МПК з однокристальними і секційними МП.
Однокристальний мікропроцесор є конструктивно - завершеним виробом у вигляді однієї ВІС. До групи однокристальних належать процесори фірм Intel Pentium (P5, P6, P7), AMD – K5, Silicon Graphics – MIPS R10000, Motorola – Power PS 603, 604, 620.
У секційних мікропроцесорах в одній ВІС реалізується лише деяка функціональна частина процесора. Секційність ВІС МП зумовлює значну гнучкість МПС.
За способом керування розрізняють МП зі схемним та МП з мікропрограмним керуванням. Мікропроцесори з схемним керуванням мають фіксований набір команд, розроблений фірмою-виробником, який не може змінювати користувач. У мікропроцесорах з мікропрограмним керуванням систему команд розробляють при проектуванні конкретного МПК на базі набору мікрокоманд. В основу побудови МПС систем покладено 3 принципи:
Принцип магістральності, який визначає характер зв’язків між функціональними блоками МПС – усі блоки з’єднуються з єдиною системною шиною.
Принцип модульності, який полягає в тому, що система будується на основі обмежено кількості типів конструктивно і функціонально завершених модулів. Кожний модуль МПС системи має вхід керування третім станом. Цей вхід CS (Chip Select) - вибір кристала або OE (Output Enable) - дозвіл виходу.
Принцип мікропрограмного керування полягає у можливості здійснення елементарних операцій-мікрокоманд.
Поняття архітектури МП визначає його складові частини. Архітектура містить:
1. Структурну схему самого МП;
2. Програмну модель МП регістрів;
3. Інформацію про організацію пам’яті;
4. Опис організації процедур введення-виведення;
Існують два основні типи архітектури – фоннейманівська та гарвардська. Фоннейманівську архітектуру запропонував 1945 року американський математик Джо фон Неймон. Ї особливістю є те, що програма і дані знаходяться у спільній пам’яті, доступ до якої здійснюється по одній шині даних і команд.
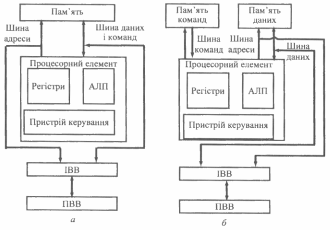
Рисунок 1. Основні типи архітектури:
а фоннейманівська; б – гарвардська.
Гарвардську архітектуру реалізовано 1944 року в релейній обчислювальній машині. Особливістю цієї архітектури є те, що пам'ять даних і пам'ять програми розділені та мають окремі шину даних і шину команд, що дозволяє підвищити швидкодію МП системи.
Структурн схеми обох архітектур містять: програмний елемент, пам'ять, інтерфейси введення-виведення (ІВВ) і (ПВВ). Усі елементи структурної схеми з’єднані за допомогою шин.
Для програмування МПС використовується мова Асемблера asm8080 для МП КР580ВМ80А. При запису команд на мові Ассемблера вказується джерело і приймач даних.
Невід'ємною частиною сучасних автоматичних систем контролю і керування, вимірювальних приладів є перетворювачі аналогових і цифрових сигналів:
ü аналого-цифрові перетворювачі (АЦП);
ü цифро-аналогові перетворювачі (ЦАП);
ü частотно-цифрові перетворювачі (ЧЦП).
Існує три різновиди виконання ЦАП, АЦП і ЧЦП: модульне, гібридне й нтегральне. При цьому частка виробництва інтегральних схем ЦАП, АЦП загалом, в обсязі їхнього випуску безупинно зростає, що в значній мірі сприяє широкому поширенню мікропроцесорної техніки і методів цифрової обробки даних. У майбутньому, очевидно, у модульному і гібридному виконаннях будуть випускатися лише надточні і надшвидкі перетворювачі з досить великою потужністю розсіювання.
Необхідно відзначити наступні основні тенденції розвитку мікросхем ЦАП і АЦП; розширення функціональних можливостей за рахунок збільшення схемної і конструктивно складності; підвищення розрядності з одночасним зниженням споживаної потужності; ріст швидкодії до 100—150 Мгц при перетворенн сигналів зі смугою частот від 25 до 50 Мгц.
Завданням даного курсового проекту є розробка схеми електричної принципової програвача приставки до ПК. Даний пристрій передбачається підключати до паралельного порту комп’ютера, але не виключається можливість його синхронізації з стаціонарним музичним центром, або програвачем в автомобілі.
1 Загальний розділ
1.1 Призначення проектуємого пристрою
Сигнальн мікропроцесори належать до класу спеціалізованих МП (див. підрозд. 2.1). їх розроблено для розв'язання задач цифрової обробки сигналів, а саме:
- фільтрац сигналу;
- згортки двох сигналів;
- обчислення значень кореляційної функції двох сигналів;
- обчислення автокореляційної функції;
- прямого/зворотного перетворення Фур'є тощо.
Задач цифрової обробки розв'язують в апаратурі зв'язку і передачі даних, засобах гідро- і радіолокації, медичному устаткуванні і робототехніці, керуванн двигунами, в автомобільній електроніці, телебаченні, вимірювальній техніц тощо.
Відмітна риса задач цифрової обробки сигналів - потоковий характер обробки великих обсягів даних у реальному режимі часу. Робота в реальному часі потребу підвищення швидкодії МП, а обробка великих масивів даних - апаратних засобів інтенсивного обміну із зовнішніми пристроями.
Високо швидкодії сигнальних МП досягають завдяки:
- застосуванню модифікованої RISC-архітектури;
- проблемно-орієнтованій системі команд, наприклад включенню до системи команд таких операцій, як множення з нагромадженням МАС(С:=АхВ+С) із зазначеною в команд кількістю виконань у циклі і з правилом зміни індексів елементів масивів А В;
- методам скорочення тривалості командного циклу, як-то конвеєризація команд;
- розміщенню операндів більшості команд у регістрах;
- використанню тіньових регістрів для збереження стану обчислень під час перемикання контексту;
- наявност апаратного множення, що дозволяє виконувати множення двох чисел за один командний такт;
- апаратній підтримці програмних циклів.
- Сигнальні процесори різних компаній-виробників утворюють два класи процесорів: простіші та дешевші МП обробки даних у форматі з фіксованою комою і дорожчі мікропроцесори, що апаратно підтримують операції над даними у форматі з плавучою комою.
1.2 Технічні характеристики
Основним елементом в схемі розроблюваній в курсовому проект MP3-декодер VS1001k, структурна схема якого зображена на рисунку 1.2.1.
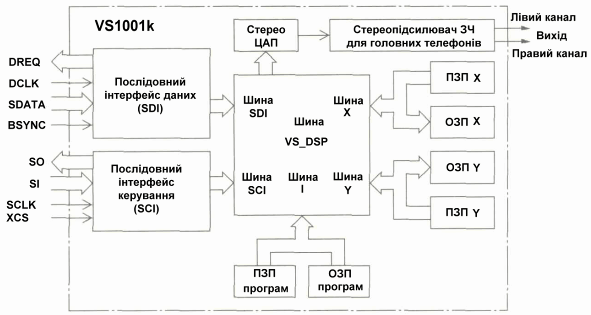
Рисунок 1.2.1 - Структурна схема VS1001k
Для керування мікросхемою і передачею потоку МР3 даних використано дві шини: SCI (Serial Control Interface) та SCI (Serial Data Interface). В таблиці 1.2.1 представлено призначення даних шин.
Таблиця 1.2.1 – Призначення шин SCI та SCI.
| Лінії шини | Дані |
|
|||
| SDI | SCI |
|
|||
| - | XCS | Вхід вибору мікросхеми. Активний рівень – низький. Високий рівень переводить послідовний інтерфейс в режим очікування, закінчуючи поточну операцію, а послідовний вихід (SO) – в режим високого опору (Z-стану). Для SDI сигналу вибору мікросхеми нема, він завжди знаходиться у активному стані. |
|
||
| DCLK | SCLK | Послідовний тактовий вхід. Сигнал SCLK може бути з перервами або без них, в будь якому випадку перший позитивний перепад тактового імпульсу після переходу |
|
||
| Лінії шини | Дані | ||||
| SDI | SCI | ||||
| DCLK | SCLK | сигналу ХСS в низький рівень означає, що записано перший біт. | |||
| SDATA | SI | Послідовний вхід. Дані вибираються з SI при позитивному перепад мпульсу SCLK і низькому рівні XCS. | |||
| - | SO | Послідовний вихід. В режимі читання дані записуються при негативному перепаді імпульсу SCLK. В режимі запису SO знаходиться в Z-стані. | |||
Мікросхема VS1001k – основна частина проектованої схеми (див рисунок 1.2.1) являє собою цифровий сигнальний процесор. Вона вміщує в себе високопродуктивне DSP-ядро з низькими споживчими характеристикам (VC_DSP), робочу пам’ять, ОЗП програм (4 Кбайт) і даних (0,5 Кбайт), послідовні інтерфейси керування і даних, високоякісний ЦАП і підсилювач ЗЧ для головних телефонів.
Дані про регістри мікросхеми та деякі інші її характеристики висвітлено в пункті 2.3.
1.3 Розробка та обґрунтування схеми електричної структурної
Структурна схема МР3- програвача – приставки до ПК зображена на рисунку 1.3.1.
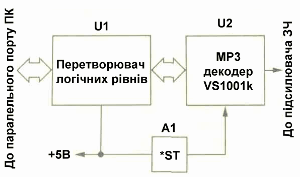
Рисунок 1.3.1 – Структурна схема МР3- програвача – приставки до ПК
З рисунка 1.3.1 видно, що розроблюваний пристрій підключається до ПК через паралельний порт. Це створює деякі проблеми: при передачі музики з якістю передаваного сигналу 128 Кбіт/с можливе ехо-подібне спотворення сигналу через малу пропускну спроможність порту. На схемі також зображено блок перетворювача логічних рівнів та МР3-декодер, що дозволяє декодувати отримуваний сигнал. Пристрій споживає 5 В, підключається до підсилювача ЗЧ
2 Спеціальний розділ
2.1 Вибір і обґрунтування елементної бази
При розробці МР3-програвача –приставки до ПК було використано ноутбук, після проведеного підбору потрібної моделі було встановлено, що можна використовувати ноутбук з процесором що має невисокі характеристики (286, 386, 486). Це дозволяє при виготовленні пристрою значно зекономити на мікроконтролері та LCD-дисплеї.
Пристрій передбачається підключати до паралельного порту ПК, але, оскільки, це дещо зменшить максимальну якість прогріваної музики, можна використати і порт ISA, для чого потрібно буде лише перепрограмувати мікросхеми, але в такому випадку його можна буде підключити лише до стаціонарних ПК (ноутбуки такої шини зазвичай не мають).
Основною частиною схеми проектуємого пристрою є фінська мікросхема VS1001k компанії VLSI Oy, яка являє собою цифровий сигнатурний процесор для апаратного декодування MPEG layer 1, 2, 3.
Для керування мікросхемою і передачею потоку МР3 даних використовуються 2 шини: SCI (Serial Control Interface) та SCI (Serial Data Interface), дані про які зведено до таблиці в пункті 1.2.
VS1001k вміщує 15 SCI – регістрів, дані про які зведено до таблиці в пункті 2.2. Регістр MODЕ надзвичайно зручно використовувати для керування операціями VS1001k. Назви його бітів та їх функцій зведено до таблиці 2.1.2.
В бітах 8-0 регістра AUDАTA зберігається значення швидкост потоку даних в кілобітах за секунду (в випадку коли вона змінна вказується швидкість потоку), в бітах 12-9 індекс частоти дискретизації (таблиця 2.1.1).
Таблиця 2.1.1 Індекси частоти дискретизації регістру AUDATA
| Біти 12-9 | Частота дискритизації |
| 0b0000 | - |
| 0b0001 | 44100 |
| 0b0010 | 48000 |
| 0b0011 | 32000 |
| 0b0l00 | 22050 |
| 0b0101 | 24000 |
| 0b0110 | 16000 |
| 0b0111 | 11025 |
| 0bl000 | 12000 |
| 0b1001 | 8000 |
Таблиця 2.1.2 – Назви бітів регістру та їх характеристика
| Біт | Назва | Функція | Значення |
| 0 | SM._DIFF | Диференціал |
0 – нормальний стан 1 – інвертовано лівий канал |
| 1 | SM.FFWD | Прискорена перемотка вперед |
0 – нормальне виконання 1 – прискорена перемотка вперед |
| 2 | SM_RESET | Програмне скидання |
0 – нормальний стан 1 - скидання |
| 3 | SM UNUSED1 | Встановлення в 0 | 0 – встановлення в 0 |
| 4 | SM_PDOWN | Режим енергозбереженння |
0 – живлення ввімкнено 1 – живлення вимкнено |
| 5 | SM UNUSED2 | Установка в 0 | 0 – встановлення в 0 |
| 6 | SM UNUSED3 | Установка в 0 | 0 - встановлення в 0 |
| 7 | SM_BASS | Частотне расширення |
0 - ввімкнено 1 - вимкнено |
| 8 | SM_DACT | Активний рівень DCLK |
0 - зростаючий 1 - спадаючий |
| 9 | SMBYTEORD | Порядок бітів на вход послідовної шини |
0 – молодший біт перший 1 – старший біт перший |
| 10 | SM IBMODE | Режим SDI |
0 – ведомий 1 – ведучий |
| 11 | SM IBCLK | Частота DCLK в режимі ведучого |
0 – 512 кГц 1 – 1024 кГц |
Дані, наведені вище дозволяють зробити висновок про те, що використання в проектованому пристрої цифрового сигнатурного процесора VS1001k цілком обґрунтоване.
2.2 Принцип роботи окремих ВІС з використанням часових діаграм та алгоритмів роботи
В даному розділі представлено дані про роботу типового сигнального процесора та розглянуто характеристики роботи сигнального процесора VS1001k.
Структуру типового представника сім'ї з фіксованою комою МП TMS320xC5x наведено на рисунку 2.2.1.
Процесор виконано за гарвардською архітектурою, основаною на розподілі шин доступу до вбудованої пам'яті програм і даних. Це дозволяє зробити вибірку команди і даних в одному машинному циклі і забезпечує виконання більшості команд за один цикл.
Сигнальний процесор TMS320xC5x складається з центрального процесорного пристрою (CPU), вбудованої пам'яті програм і даних, багатофункціональних периферійних пристроїв, що здебільшого дозволяють позбутися додатково зовнішньої апаратури.
Процесор містить шини: PDATA - шина даних пам'яті програм; PADDR - шина адреси пам'яті програм; DDATA - шина даних пам'яті даних; DADDR - шина адреси пам'яті даних для незалежного доступу до пам'яті програм і даних.
Центральний процесорний пристрій CPU. До його складу входять:
- 32-розрядний АЛЛ, який виконує більшість команд за один цикл;
- акумулятор АСС, розділений на два сегменти по 16 розрядів (АССН і ACCL);
- акумуляторний буфер АССВ;
- арифметичний пристрій допоміжних регістрів ARA U;
- регістровий файл AR0-AR7 і регістр INDR;
- незалежний логічний блок PLU;
- апаратний помножувач 16x16;
- регістри зсуву: регістр масштабування і зсуву SPL, який виконує зсув ліворуч на 0-16 розрядів і призначений для вирівнювання та перетворення даних, узятих з пам'яті; регістр зсуву SFL на виході помножувача; регістр зсуву SR;
- стек STACK;
- покажчик команд PC;
- мультиплексори MUX.
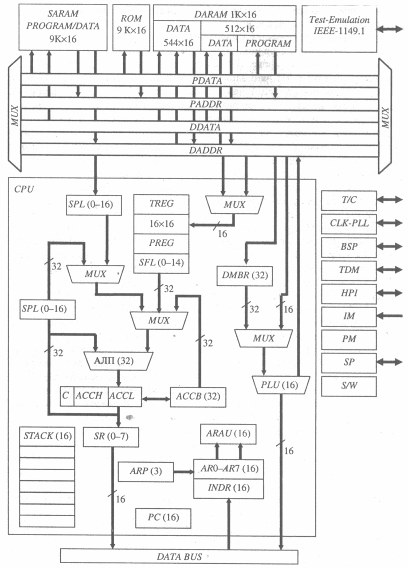
Рисунок 2.2.1 – Архітектура цифрових сигнальних процесорів
Арифметико-логічний пристрій АЛП. На перший вхід АЛП надходять дан одного з таких пристроїв:
· регістра масштабування і зсуву SPL;
· регістра зсуву SFL на виході регістра помножувача PREG;
акумуляторного буфера АССВ.
На другий вхід АЛП дані завжди надходять з акумулятора АСС, а результат виконання операцій надходить також в АСС. Регістр зсуву SR, з'єднаний з виходом АСС, викону зсув ліворуч на 0-7 розрядів, що відбувається в циклі пересилання даних з АЛП на внутрішню шину даних.
Апаратний помножувач 16x16. Виконує операції над числами зі знаком і без знака. Операнди надходять з пам'яті даних. Один з операндів може бути константою, поданою безпосередньо в команді. Для тимчасового збереження одного з операндів використовують 16-розрядний регістр TREG. У 32-розрядний регістр PREG завантажується результат множення.
Регістровий файл, що складається з восьми допоміжних регістрів (AR0-AR1) та індексного регістра (INDR) використовують для формування адреси при непрямій адресації. Якщо треба, AR0-AR7 можна використовувати для тмчасового збереження, даних, Для щфесації до допоміжних регістрів слугує покажчик допоміжних регістрів (ARP). Регістри AR0-AR1 завантажуються з пам'ят даних, акумулятора АСС чи операндом, поданим у команді. Уміст AR0-AR7 можна зберегти в пам'яті чи використати для обчислень в АЛП.
Арифметичний пристрій ARAU. Разом з регістрами AR0-AR7 і INDR його призначено для генерації адреси. Зазвичай AR0-AR7 використовують для зберігання адреси, a INDR містить зсув. Прості арифметичн операції (додавання, віднімання; інкрементування, декрементування), виконуван в ARA(/з умістом AR0-AR1 і INDR, дозволяють реалізувати кілька видів непрямої адресації. Операції в ARAU виконуються одночасно з адресацією до поточної комірки пам'яті. Блок ARA U звільняє АЛП від роботи з обчислення адрес.
Логічний блок PLU виконує операції незалежно від АЛП Результат операцій у PLU не впливає на біти стану АЛП. Перший операнд надходить у PLU з пам'яті даних, другий - з пам'ят чи програм регістра маніпуляції бітами (DBMR). Спеціальн логічні команди, виконувані тільки PLU, дозволяють у 16-розрядному слові встановлювати та очищувати будь-яку кількість біт у довільній комбінації. Результат операцій у PLU зберігається в тій самій комірц пам'яті, звідки було обрано перший операнд. Отже, логічні операції можна виконувати безпосередньо зі змістом будь-якої комірки пам'яті даних, зокрема з змістом перших 16 портів введення-виведення, що можуть адресуватися як пам'ять даних (адреси 50H-5FH).
Пам'ять. МП TMS32QxC5x передбачає роздільну адресацію до пам'яті програм, даних і портів введення-виведення. Ємність кожної област пам'яті 64 кбайт 16-розрядних слів. Вбудована в кристалі пам'ять - ROM, SARAM, DARAM знаходиться в загальному адресному просторі пам'яті і може використовуватися як пам'ять програм чи даних.
Пам'ять програм ROM - програмовій маскою пам'ять з можливістю захисту від зовнішнього доступу. У МП TMS320xC5x передбачено два режими роботи: мікропроцесорний і мікрокомп'ютерний. У мікрокомп'ютерному режимі ROM доступна, у мікропроцесорному - закрита для доступу. Вибір режиму визначається рівнем напруга на вході МР/МС під час скидання. Після старту режим можна змінити програмно. Для зміни режиму роботи в регістрі стану процесорного режиму (PMST) передбачено біт керування (МР/МС).
Пам 'ять даних чи програм/даних SARAM (Single Access RAM) передбачає виконання однієї операції читання/запис у повному машинному циклі. SARAM складається з незалежних блоків по 2 кбайт чи по 1 кбайт слів. Кожен блок допускає одну операцію читання/запис у машинному циклі. Тому в одному машинному циклі CPU може двічі звернутися до SARAM, але тільки тоді, коли звернення відбувається до різних блоків. Цю особливість SARAM треба враховувати під час розподілу пам'яті і написання програм. Ще одна особливість SARAM полягає в тому, що процесор чи інший зовнішній пристрій може звертатися безпосередньо до SARAM у режимі ПДП. Для ініціалізац доступу до SARAM процесор спочатку запитує доступ до зовнішньої пам'яті (установлює сигнал HOLD). Після одержання сигналу підтвердження (HOLDA) процесор може запросити доступ до SARAM (установлює сигнал BR). У цьому разі CPU зупиняє всі поточні операц підтверджує можливість доступу до SARAM (установлює сигнал IAQ). Пам'ять SARAM можна використовувати для збереження тільки даних, програм чи для спільного розміщення програм і даних.
Конфігурація SARAM змінюється програмно за допомогою двох біт конфігурації — OVLY і RAM, що знаходяться в регістрі PMST. Можливість реконфігурації SARAM у процесі виконання програми дозволя оперативно змінювати розподіл пам'яті МП TMS320xC5x.
Пам'ять даних DARAM (Dual Access RAM) передбачає виконання однієї операції читання й одн операції запису в повному машинному циклі без конфліктів на внутрішній шин даних. DARAM складається з блоків В, В\, В1. Блоки 51 (32 слова) й 52 (512 слів) використовують тільки як пам'ять даних. Блок В (512 слів) можна використовувати як пам'ять даних чи як пам'ять програм. Конфігурація блока В змінюється програмно за допомогою біта конфігурац (CNF) у регістрі стану (ST1). Призначення блока В можна змінювати в процесі виконання програми. Передбачено можливість завантаження блока В програмним кодом із зовнішньої пам'яті з наступним виконанням.
Периферійні пристрої. Сигнальний процесор має такі периферійні пристрої.
Модуль переривання ЇМ (Interrupt Module) призначено для обслуговування зовнішніх, внутрішніх і програмних переривань.
До зовнішніх переривань належать два немасковані переривання RS, NM\ і п'ять маскованих INT1-INT4. Внутрішні переривання (RINT, XINT, TRNT, TXNT) генеруються послідовними портами або таймером (TINT). Програмні переривання викликаються командами TRAP, 1NTR, NMI.
Переривання встановлюють прапорець переривань у регістрі прапорців переривань (IFR) і можуть маскуватися в регістр переривань (ІMR).
Вектори переривань займають два 16-розрядні слова, потрібні для розміщення команд розгалуження. Після скидання МП вектори переривань розміщуються з нульової адреси пам'яті програм. Під час звернення CPU до векторів переривань старші п'ять розрядів адреси формуються покажчиком векторів переривань (IRTR) у регістрі PMST.
Вбудований механізм захисту багатоциклічних команд забезпечує ввімкнення механізму обслуговування переривань після завершення їх виконання. Дія механізму захисту поширюється також на команди, що стають багатоциклічними внаслідок їх повторення з префіксом RPT, і на команди, що очікують завершення обміну із зовнішньою пам'яттю чи портами введення-виведення.
Блок керування енергоспоживанням РМ (Power Management). У МП TMS320xC5x передбачено три енергоощадні режими роботи (зокрема, «сплячий» режим), у яких струм споживання знижують відключенням CPU чи периферійних пристроїв. Перехід в енергоощадні режими ініціює активний сигнал HOLD (режим захоплення зовнішньої шини) чи команди IDLE, IDLE2. Вихід з енергоощадних режимів відбувається за сигналами зовнішніх переривань, які треба встановити принаймн протягом п'яти машинних тактів чи за внутрішніми перериваннями. В енергоощадних режимах зберігається стан усіх внутрішніх регістрів, що дозволяє без затримок продовжити роботу після виходу з цих режимів.
У режимі захоплення зовнішньої шини (HOLD = 0) продовжують працювати тільки внутрішні ресурси МП TMS320xC5x. Зниження струму споживання відбувається за рахунок переключення зовнішніх шин у високоімпедансний стан.
Інструкція IDLE2 викликає зупин CPU і периферійних пристроїв («сплячий» режим), що значно знижує струм споживання.
Вбудований генератор CLK-PLL виробляє тактові синхросигнали для роботи CPU і периферійних пристроїв. Передбачено можливість підключення зовнішнього кварцового резонатора чи резонатора зовнішнього тактового генератора. Допустимий режим роботи з множенням чи з діленням частоти джерела тактового сигналу.
Таймер/лічильник Т/С являє собою 16-розрядний лічильник, що працює на вирахування. Коли досягнено нульове значення, генерується переривання TINT і формується імпульс на виході TOUT. Тривалість імпульсу дорівню періодові сигналу CLKOUTI. Таймером керують програмно, його можна зупинити, перезапустити, скинути чи заборонити.
Інтерфейс ТЕ (Test-Emulation) забезпечує можливість тестування мікросхем підключення емулятора типу XDS510. Зв'язок з емулятором відбувається по стандартному послідовному інтерфейсу ІЕЕЕХ 149.1 (JTAG). Генератор тактів очікування S/W (Waitstate Generator) призначений для генерації і додавання в цикли обміну тактів очікування для збільшення часу циклів обміну з повільною зовнішньою пам'яттю чи портами введення-виведення. Використання генератора дозволяє обійтися без додаткової зовнішньої апаратури, що формує сигнал готовності READY. Генератор керується програмно. Кількість тактів очікування програмується окремо для пам'яті програм, даних, портів введення-виведення та областей адресного простору. Для керування генератором передбачено два регістри керування. Кількість тактів очікування може бути 0, 1,2, 3, 7.
Послідовний порт SP (Serial Port). Це стандартний послідовний порт, який дозволяє по шести лініях організувати повнодуплексний зв'язок між двома МП TMS320xC5x. Для передачі даних в одному напрям використовують три лінії, по яких передаються: тактова частота, синхроімпульс, дані синхронно з тактовою частотою. Тактову частоту і синхроімпульс формує МП TMS320xC5x, але, якщо треба, тактову частоту синхроімпульс можуть формувати і зовнішні пристрої. Можливі два режими передач даних: пакетний, у якому синхроімпульс формується на початку кожного переданого слова; безупинний, у якому синхроімпульс формується тільки на початку передачі. Вхідні і вихідні регістри зсувів буферизовано. Обмін по стандартному послідовному порту відбувається під керуванням CPU. Допускається 8- чи 16-розрядний формат передачі. Максимальна швидкість передачі даних залежить від тактово частоти МП TMS320xC5x. Для циклу 50 не максимальна швидкість передачі даних становить 5 Мбіт/с.
Послідовний порт із часовим поділом каналів TDM використовують для обміну даними між МП TMS320xC5x у мультипроцесорних системах. TDM-порт працює у двох режимах, що переключаються програмно. Перший - режим стандартного послідовного порту, розглянутий вище. Другий - режим часового поділу каналів, у якому для синхронізації передачі даних між процесорами МП TMS320xC5x кожні 128 тактів (TCLK) передається синхроімпульс (TFRM). По лінії даних (TDAT) передаються 16-розрядні дані, по лінії адреси (TADD) передається адреса. Керування роботою і контроль за станом TDM-порту відбувається за допомогою шести регістрів. Буферизований послідовний порт BSP (Buffer Serial Port). До його складу входить інтерфейс послідовного порту (SPI), що являє собою удосконалену версію стандартного послідовного порту і блока автобуферизації (ABU). Блок ABU дає можливість виконувати обмін даними безпосередньо з вбудованою пам'яттю МП TMS320xC5x через спеціально виділену шину незалежно від CPU. Для буфера обміну даними використовують виділені 2 кбайт вбудованої пам'яті МП TMS320xC5x. Для адресації до пам'яті ABU має власний адресний регістр. Ємність початкова адреса буфера програмуються. Допускається 8-, 10-, 12- чи 16-розрядний формат передачі в пакетному чи безупинному режимі.
8-розрядний паралельний порт - host-інтерфейс HPI (Host Processor Interface). Призначений для обміну даними в мультипроцесорному режимі між /киґ-процесором і МП TMS320xC5x. host-інтерфейс HPI забезпечує можливість просто нтеграції процесора в мультипроцесорну систему. Обмін даними відбувається через вбудовану буферну пам'ять ємністю 2 кбайт слів по спеціальній внутрішній шині, що дозволяє обмінюватися з пам'яттю без конфліктів з CPU. Буферна пам'ять - SARAM пам'ять. Для керування НРІ передбачено регістр керування і контролю (НРІС), доступний host-процесору і CPU. Для адресації до буферної пам'яті з боку host-процесора слугує адресний регістр (НРІА). НРІ допускає два режими роботи. Перший - режим (SAM), у якому host-nроцесору і CPU дозволено доступ до пам'яті, причому host-процесор має пріоритет перед CPU. Другий - режим (НОМ), у якому тільки host-процесор має доступ до пам'яті. Для передачі через НРІ одного байта даних потрібно п'ять машинних тактів. При тактовій частоті 40 МГц максимальна швидкість передач становить 64 Мбіт/с.
Блок початкового завантаження BL (Boot Loader) виконує пересилання програмного коду з зовнішніх джерел у вбудовану пам'ять програм. Ініціалізація програми початкового завантаження відбувається після ввімкнення живлення тільки в мікрокомп'ютерному режимі. Передбачено сім видів завантаження, що різняться способом і форматом передачі даних: через послідовний порт у 8- чи 16-розрядному форматі; через порти введення-виведення у 8- чи 16-розрядному форматі; із зовнішньої пам'яті у 8- чи-16-розрядному форматі; «гаряче завантаження». Вид завантаження визначається вмістом молодших 8 розрядів комірки загальної пам'яті з адресою FFFFH, до якої МП TMS320xC5x звертається після ввімкнення живлення. Перед пересиланням програмного коду передається заголовок, що містить адресу початку розміщення програмного коду і довжину блоку, що пересилається. Після завершення пересилання в пам'ять програм МП TMS320xC5x стартує з адреси, зазначеної в заголовку.
У МП TMS320xC5x доступ до зовнішньої пам'яті і портів введення-виведення можливий по шині адреси АТ-А15 і по шині даних D0-D15 за допомогою керувальних сигналів PS, DS, IS (для вибору відповідно пам'ят програм, даних і портів введення-виведення), строба STRB, сигналу напрямок передачі в поточному циклі R/W, сигналу читання RD і сигналу запис WE. Максимальна продуктивність забезпечується у процесі обміну з високошвидкісною зовнішньою пам'яттю, що дозволяє працювати без тактів очікування. Можливе підключення повільно дешевшої пам'яті. У цьому разі в цикли читання/запис МП TMS320xC5x треба додавати такти очікування, як генеруються вбудованим генератором тактів очікування, чи формувати зовнішній сигнал READY - готовності зовнішньої пам'яті чи портів введення-виведення. Організовуючи обмін із зовнішньою пам'яттю, слід також враховувати, що цикли читання мають тривалість одного машинного такту, водночас тривалість циклів запис становить два машинні такти або, якщо запис відбувається безпосередньо за читанням, то навіть три такти. У верхніх адресах пам'яті даних може розміщуватися зовнішня глобальна пам'ять даних розміром від 256 до 32 К слів. Адреси від 00Я до 5FH пам'яті даних відведено під внутрішн регістри. Перші 16 портів введення-виведення розміщені в пам'яті даних. Тому звертання до цих портів можливе не тільки за допомогою команд IN і OUT, але й за допомогою звичайних команд звернення до пам'яті (завдовжки 1 слово), що дозволяють зменшити розмір програмного коду і збільшити швидкість обчислень. Щоб уявити роботу сигнального процесора VS1001k розглянемо дані про функції його регістрів.
Таблиця 2.2.1 – Регістри в МП VS1001k
| Назва регістру | Тип | Адреса | Функція |
| MODE | RW | 0 | Керування режимами |
| STATUS | RW | 1 | Статус VS1001k |
| INT FCTLH | - | 2 | Користувач не доступний |
| CLOCKF | RW | 3 | Частота тактового генератора + подвоєння частоти |
| DECODE TIME | R | 4 | Час декодування в секундах |
| AUDATA | R | 5 | Поточн аудиодані |
| WRAM | W | 6 | Запис в ОЗП |
| WRAMADDR | W | 7 | Адреса для запису в ОЗП |
| HDATO | R | 8 | Читання заголовку даних |
| HDAT1 | R | 9 | Читання заголовку даних |
| AIADDR | RW | 10 | Стартова адреса доповнення |
| VOL | RW | 11 | Регулювання гучності |
| RESERVED | - | 12 | Зарезервований VS1002 |
| AICTRL[x] x = [0.1] | RW | 13+x | Два керуючих регістрів для додатків |
Регістр MODE використовується для керування операціями VS1001k.
Регістр STATUS зберігає інформацію про поточний стан мікросхеми.
Регістр CLOCKF використовується в випадку коли тактова частота відмінна від 24,576 МГц.
Регістр DECODE_TIME при обробці потоку зберігає поточний час декодування в секундах.
В бітах 8-0 регістра AUDATA зберігається швидкість потоку даних в кілобітах за секунду.
З допомогою регістрів WRAM, WRAMADDR, AIADDR можливо завантажувати та запускати в мікросхемі додатки, написані користувачем, наприклад змішування каналів, стереоефекти та ін.
Регістри HDAT0 і HDAT1 зберігають у собі інформацію про назву даних що надходять з поточного потоку.
Регістр VOL призначений для регулювання гучності.
2.3 Принцип роботи пристрою згідно схеми електричної принципової
Схему електричну принципову створюваного пристрою зображено на рисунку 2.3.1.
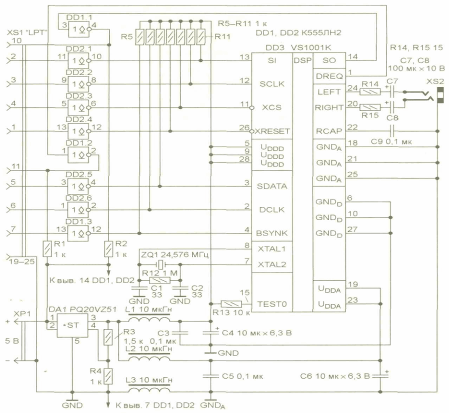
Рисунок 2.3.1 – Схема електрична принципова MP3-програвача – приставки до ПК
Розглянемо схему електричну принципову. Основним вузлом, зображеним на ній є цифровий сигнальний процесор для апаратного декодування MPEG layer 1, 2, 3, VS1001k. В якості стабілізатора напруги використано мікросхему PQ20VZ51 фірми SHARP.
Для розділення кіл живлення аналогової і цифрової частин використано фільтруючі дроселі L1-L3 і конденсатори C3 – C6. Мікросхема має вбудовану функцію ввімкнення/вимкнення живлення, яка може бути використана в портативному варіанті приладу.
3 Експлуатаційний розділ
3.1 Ініціалізація програмуємих ВІС
Програма ніціалізації мікросхем виконує налагодження портів вводу-виводу мікросхем та встановлює параметри дільника та входів мікросхеми по яким буде виконуватися переривання. Також налагоджуються переривання по таймеру. Всі інші переривання забороняються.
3.2 Тест перевірки окремих вузлів або пристроїв
Так як проектуємий пристрій підключається до ноутбука (або стаціонарного комп’ютера) та керується ним, пристрій перевірки не потребує.
3.3 Розрахунок надійності пристрою
Надійність – властивість пристрою виконувати задан функції в заданих режимах і умовах застосування, обслуговування, ремонту, збереження, транспортування на протязі необхідного інтервалу часу.
Показники надійності:
1. Безвідмовність.
2. Довговічність.
3. Ремонтопридатність.
4. Збереження.
Безвідмовність – властивість безупинно зберігати працездатність до граничного стану, після настання, якого подальша експлуатація виробу економічно недоцільна.
Ремонтопридатність – пристосованість пристрою до попередження відмовлень, до можливості виявлення та усунення несправностей шляхом проведення ремонту і технічного обслуговування.
До термінів ремонтопридатності відносяться: відмовлення, збереження.
Відмовлення подія, що полягає в повній або частковій утраті працездатності пристрою.
Відмовлення бувають:
Раптов (катастрофічні) – стрибкоподібна зміна параметрів робочого виробу.
Поступов (параметричні) – постійна зміна одного або декількох параметрів з часом, що виходять за припустимі межі.
Збереження термін, протягом якого при дотриманні режимів збереження виріб зберіга працездатний стан.
Розрахунок надійності поділяється на три розділи:
1. Визначення значення інтенсивност відмовлення всіх елементів за принциповою схемою вузла пристрою.
2. Визначення значення імовірност безвідмовної роботи всієї схеми.
3. Визначення середнього наробітку до першого відмовлення.
4. Виконання розрахунків проходить наступним чином:
5. 1. Інтенсивність відмовлення всіх елементів визначається за формулою:
6. ![]() (3.3.1)
(3.3.1)
7. де:
8. ni – кількість елементів у схемі;
9. li – інтенсивність відмовлень і-го елемента;
10. m – кількість типів елементів.
11. При розрахунку також потрібно враховувати інтенсивність відмовлень через пайки радіоелементів на друкованій платі.
12. Інтенсивність відмовлень елементів розраховуємо за формулою:
13.
![]() (3.3.2)
(3.3.2)
14. де:
15. lо – інтенсивність відмовлень елементів у режимі номінального навантаження;
16. Кe – експлуатаційний коефіцієнт;
17. Кр – коефіцієнт навантаження.
18. Усі ц параметри беруться з довідника з розрахунку надійності.
19. 2. Ймовірністю безвідмовної роботи називається ймовірність того, що за певних умов експлуатації в заданому інтервалі часу не відбудеться жодного відмовлення.
20. Ймовірність безвідмовної роботи визначається за формулою:
21.
![]() (3.3.3)
(3.3.3)
22. де:
23.
![]() - інтенсивність відмов всіх елементів;
- інтенсивність відмов всіх елементів;
24. t – час, (год).
25. За результатами розрахунків складається таблиця і графік.
26. 3. Середній наробіток до першого відмовлення – це час роботи пристрою до першої відмови.
27. Середній наробіток на відмовлення визначається за формулою:
28.
![]() (3.3.4)
(3.3.4)
29. Розрахунок надійності пристрою приведено далі.
Анотація
В курсовому проекті була розроблено схему електричну принципову МР-3 програвача приставки до ПК. Спроектована схема електрична принципова пристрою, структурна та загальна схема, виконано опис всіх ВІС, що використовувалися у пристрої.
Написання курсового проекту змусило повторити весь матеріал вивчений на заняттях з курсу «МПС», звернутися до додаткових джерел, та навчитися проектувати електричн принципові, структурні схеми та схеми роботи пристроїв, а також працювати з технічними довідниками.
Література
1. ЕСКД ГОСТ 2.105-79 "Общие требования к текстовым документам".
2. ЕСКД ГОСТ 2.702-75 "Правила выполнения электрических схем".
3. Якименко Ю.І., Терещенко Т.О. , Сокол Є.І. Мікропроцесорна техніка. 2004.
4. Методичн вказівки щодо виконання курсової роботи.
5. А.С. Басманов «МП и ОЭВМ», Москва, «Мир», 1988.
6. В.В. Сташин, А.В. Урусов «Программирование цифровых устройств на однокристальных микроконтроллерах», Москва, «Энергоатомиздат», 1990.
7. Самофалов К.Г., Викторов О.В., Кузняк А.К. «Микропроцессоры» // К.: Техника, 1986.
8. Бороволоков Э.П. Фролов В. В. «Радиолюбительские схемы» // К.: Кондор – 1995 – 6 с.
9. Каган Б.М., Сташин В. В. Микропроцессоры в цифровых системах.- М.: Энергия, 1979.
10. Аналоговые и цифровые интегральные микросхемы / Под ред. С.В. Якубовского. - М. Радио и связь, 1984.
© 2010 Интернет База Рефератов