
Рефераты по сексологии
Рефераты по информатике программированию
Рефераты по биологии
Рефераты по экономике
Рефераты по москвоведению
Рефераты по экологии
Краткое содержание произведений
Рефераты по физкультуре и спорту
Топики по английскому языку
Рефераты по математике
Рефераты по музыке
Остальные рефераты
Рефераты по авиации и космонавтике
Рефераты по административному праву
Рефераты по безопасности жизнедеятельности
Рефераты по арбитражному процессу
Рефераты по архитектуре
Рефераты по астрономии
Рефераты по банковскому делу
Рефераты по биржевому делу
Рефераты по ботанике и сельскому хозяйству
Рефераты по бухгалтерскому учету и аудиту
Рефераты по валютным отношениям
Рефераты по ветеринарии
Рефераты для военной кафедры
Рефераты по географии
Рефераты по геодезии
Рефераты по геологии
Рефераты по геополитике
Рефераты по государству и праву
Рефераты по гражданскому праву и процессу
Рефераты по делопроизводству
Рефераты по кредитованию
Рефераты по естествознанию
Рефераты по истории техники
Рефераты по журналистике
Рефераты по зоологии
Рефераты по инвестициям
Рефераты по информатике
Исторические личности
Рефераты по кибернетике
Рефераты по коммуникации и связи
Реферат: Динамические характеристики объектов регулирования
Реферат: Динамические характеристики объектов регулирования
Динамические характеристики объектов регулирования
Выбор элементного состава системы регулирования, законов регулирования, обеспечение требуемого качества процесса регулирования во многом определяется динамическими свойствами элементов АСР, и прежде всего объекта регулирования. Для определения динамических свойств ОР используют его динамические характеристики, к числу которых относят: разгонные характеристики, импульсные характеристики, частотные характеристики.
Динамические характеристика, как правило, определяются экспериментально. При невозможности получения экспериментальной характеристики пользуются методом математического моделирования АСР, описывая ее поведение дифференциальными уравнениями.
Разгонные характеристики объектов регулирования
Разгонной или переходной характеристикой называют зависимость изменения выходной регулируемой величины от времени yвых(t). Для получения разгонной характеристики ОР ступенчатое воздействие может быть приложено к объекту регулирования или к регулятору.
Разгонные характеристики снимают при испытаниях или наладке в случаях, когда можно нанести значительные по величине и продолжительности во времени воздействия, достаточные для того, чтобы закончился переходный процесс, т.е. стабилизировался регулируемый параметр, по отношению к которому получают разгонную характеристику, либо стабилизировалась скорость его изменения.
Методика получения разгонных характеристик сводится к выполнению следующих основных условий:
- до нанесения воздействия стабилизируется режим работы ОР по регулируемому параметру, относительно которого снимается разгонная характеристика;
- размыкается главная обратная связь между ОР и регулятором, регулирующим параметр, по которому снимается разгонная характеристика;
- величина воздействия устанавливается исходя из производственных возможностей длительного нарушения режима работы ОР.
Необходимо, чтобы воздействие
значительно превосходило по величине случайные возмущения, которые могут иметь
место во время опыта (обычно воздействие составляет не менее 10% от максимально
возможного). Воздействия наносят с возможно большой скоростью, приближаясь к
ступенчатому. Во время опыта необходимо обеспечить, чтобы другие виды
возмущений отсутствовали или, во всяком случае, были малы по сравнению с
наносимым. В виду того, что сложные регулируемые объекты имеют различные динамические
свойства при различных видах воздействий, разгонные характеристики снимают при
управляющем ![]() и возмущающем
и возмущающем ![]() воздействии., либо
воздействии приложенном к исполнительному механизму регулировочного органа
воздействии., либо
воздействии приложенном к исполнительному механизму регулировочного органа ![]() . Опыт следует повторить,
по крайне мере, два раза при воздействиях одного знака (направления) и затем
направление (знак) изменить. Разгонная характеристика будет считаться
полученной при удовлетворительном совпадении результатов. Для нелинейных ОР
опыт проводят при нескольких, обычно трех, различных нагрузках ОР.
. Опыт следует повторить,
по крайне мере, два раза при воздействиях одного знака (направления) и затем
направление (знак) изменить. Разгонная характеристика будет считаться
полученной при удовлетворительном совпадении результатов. Для нелинейных ОР
опыт проводят при нескольких, обычно трех, различных нагрузках ОР.
Разгонная характеристика одноемкостного объекта регулирования с самовыравниванием. Способность объекта регулирования приходить после воздействия на него в новое установившееся состояние называется свойством самовыравнивания ОР.
У ОР с самовыравниванием каждому положению регулировочного органа или значению нагрузки (возмущающему воздействию) соответствует свое установившееся значение регулируемого параметра, согласно величине воздействия.
Разгонные характеристики приведены на рис. 1.
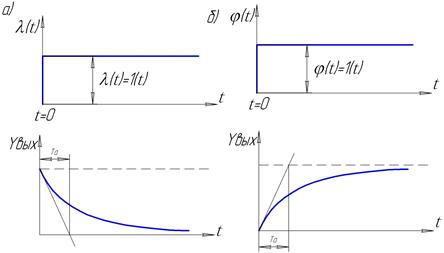
Рис. 1 - Разгонные характеристики: а)
при ![]() -возмущающем воздействии,
б) при
-возмущающем воздействии,
б) при ![]() -управляющем воздействии.
-управляющем воздействии.
Особенность одноемкостных ОР в том, что скорость изменения yвых максимальна с момента нанесения воздействия. Параметры разгонных характеристик, по которым оценивают динамические свойства ОР (Рис. 2):
Та- время разгона для ОР-время, в течении которого регулируемый параметр изменится от своего начального значения в момент времени t0 до заданного значения, отвечающему величине воздействия, с постоянной максимальной скоростью, соответствующей наибольшему небалансу.
Для определения Та проводят
касательную к кривой разгона из точки t=0. Касательная отсекает отрезок на оси времени, при пересечении
касательной и заданного значения регулируемой величины, определяемого величиной
воздействия. Практика получения и обработки разгонных характеристик показывает,
что для одноемкостных ОР с самовыравниванием время разгона Та соответствует
времени, прошедшему от момента возникновения возмущения до момента достижения
регулируемой величины значения, равного 0,633 потенциального значения ![]() .
.
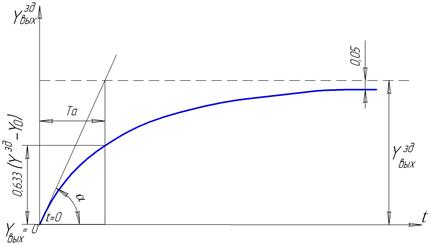
Рис. 2 - Обработка разгонной характеристики
Величина, обратная времени разгона называется скоростью разгона ОР
![]()
Для ОР с самовыравниванием введено
понятие степень или коэффициент самовыравнивания (саморегулирования)![]() , связывающий скорость
нанесения воздействия на ОР со скоростью изменения регулируемого параметра,
, связывающий скорость
нанесения воздействия на ОР со скоростью изменения регулируемого параметра,
![]() ,
,
в конечных приращениях
![]() .
.
Знак (–) указывает, что
самовыравнивание имеет место тогда, когда отклонение параметра вызывает
уменьшение причины отклонения. Величина обратная коэффициенту самовыравнивания
называется коэффициентом передачи или усиления для ОР, ![]() . Коэффициент усиления
. Коэффициент усиления ![]() определяется для
установившегося состояния ОР, когда yвых конечное
должно отличаться от yвых заданного не более, чем на 5%.
определяется для
установившегося состояния ОР, когда yвых конечное
должно отличаться от yвых заданного не более, чем на 5%.
Отношение времени разгона Та к коэффициенту самовыравнивания дает для ОР динамическую постоянную времени ОР «Т».
![]() ;
; ![]() .
.
Т- учитывает динамические и статические свойства ОР в отличие от Та.
Время достижения конечного значения
регулируемой величины называется временем переходного процесса Тпп, для
практических расчетов ![]() . Примеры
одноемкостных ОР: ротор турбоагрегата, работающего на выделенную нагрузку,
емкость с водой, газом при нормативных параметрах окружающей среды. Барабан
котельного агрегата, если его рассматривать как ОР по давлению пара.
. Примеры
одноемкостных ОР: ротор турбоагрегата, работающего на выделенную нагрузку,
емкость с водой, газом при нормативных параметрах окружающей среды. Барабан
котельного агрегата, если его рассматривать как ОР по давлению пара.
Разгонные характеристики одноемкостного объекта регулирования без самовыравнивания (Рис. 3).
а) при возмущающем воздействии ![]()
б) при управляющем воздействии ![]()
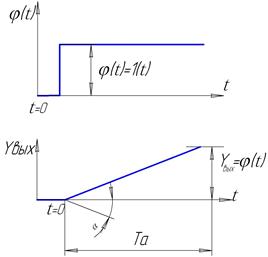
Рис. 3 - Разгонные характеристики одноемкостного ОР без самовыравнивания
ОР без самовыравнивания относят к
числу астатических ОР. Основные параметры, характеризующие динамические
свойства ОР без самовыравнивания. Время разгона ![]() определяется
величиной отрезка на оси времени
определяется
величиной отрезка на оси времени ![]() при
условии достижения регулируемой величины значения входного воздействия
при
условии достижения регулируемой величины значения входного воздействия ![]() или
или ![]() . Скорость разгона
. Скорость разгона ![]() , ее величина зависит от
угла наклона разгонной характеристики к оси времени -
, ее величина зависит от
угла наклона разгонной характеристики к оси времени - ![]() .
. ![]() , при
, при ![]() или
или ![]() , при
, при ![]() . Время разгона равно Та =
динамической постоянной ОР Т, при этом коэффициент передачи или усиления ОР
будет К=1.
. Время разгона равно Та =
динамической постоянной ОР Т, при этом коэффициент передачи или усиления ОР
будет К=1.
Неустойчивые объекты или объекты с отрицательным самовыравниванием. К числу неустойчивых относят ОР, у которых, даже при самом незначительном возмущении, отклонение параметра продолжается безгранично и со все возрастающей скоростью. Примером регулируемого объекта, имеющего в некоторых режимах отрицательное самовыравнивание, может служить шаровая барабанная мельница (ШБМ) как ОР загрузки барабана мельницы топливом. Разгонная характеристика ШБМ изображена на рис. 4 при ступенчатом изменении положения регулировочного органа подачи топлива m. При загрузках ниже нормальной мельница имеет положительное самовыравнивание, т.е. является устойчивым объектом. При номинальной нагрузке самовыравнивание мельницы равно нулю и она представляет собой в этом режиме астатический объект. Наконец, перегруженная мельница становится неустойчивым объектом вследствии того, что производительность мельницы (выдача пыли В2) падает с ростом загрузки ее топливом (G). Если в режиме, когда ШБМ находится на границе устойчивости, нарушить равновесное состояние мельницы за счет увеличения подачи топлива В1, то наступающий при этом рост загрузки обуславливает в свою очередь уменьшение выдачи пыли В2.
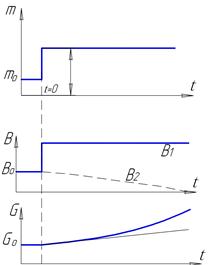
Рис. 4 - Разгонная характеристика ШБМ
Небаланс между подачей топлива В1 и выдачей пыли В2 непрерывно растет и вызывает дальнейшее увеличение загрузки G со все возрастающей скоростью. Если вовремя не уменьшить подачу, то мельница быстро окажется заваленной топливом.
Чтобы выяснить, является ли объект устойчивым или не устойчивым, достаточно знать, как влияет в АСР отклонение параметра на приток и расход вещества или энергии в объекте. Если рост параметра вызывает уменьшение небаланса, то объект имеет положительное самовыравнивание. Для астатического или так называемого нейтрального объекта изменение параметра не оказывает никакого влияния на приток вещества или энергии. Наконец, если с ростом параметра небаланс увеличивается, то объект неустойчив.
Разгонные характеристики многоемкостных объектов регулирования. При автоматизации тепловых процессов на электростанциях приходится встречаться, как правило, с более сложными объектами, содержащими две, три и более емкостей. Такие многоемкостные объекты представляют цепь последовательно соединенных одноемкостных звеньев. Пример двухемкостного объекта - теплообменник со змеевиковым подогревателем, как объект регулирования температуры. Этот объект состоит из двух последовательно соединенных звеньев. Первым звеном являются обогревающие змеевики, а вторым собственно теплообменник. При регулировании температуры динамические свойства первого звена определяются тепловой емкостью змеевиков, а свойства второго звена - тепловой емкостью обогреваемого вещества. Многоемкостные объекты, также как одноемкостные, могут иметь свойства самовыравнивания или быть астатическими. Если в цепи последовательно соединенных звеньев хотя бы одно звено не имеет самовыравнивания, то и весь объект в целом является астатическим.
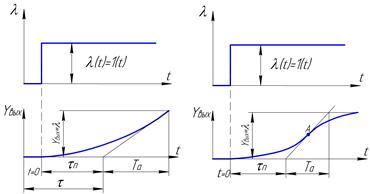
Рис. 5 - Разгонные характеристики многоемкостных ОР: а) астатический объект б) статический объект (с самовыравниванием)
Характерной особенностью динамических
свойств многоемкостных объектов является то, что после нанесения воздействия не
происходит заметного изменения регулируемого параметра (Рис. 5). Если у
одноемкостных объектов начальная скорость изменения параметра является
наибольшей, то у многоемкостных - скорость отклонения регулируемой величины
после воздействия начинает постепенно возрастать от нуля и достигает своей
наибольшей величины лишь спустя некоторое время. Поэтому у многоемкостных
объектов по сравнению с одноемкостными отклонение параметров на выходе ОР при прочих
одинаковых условиях отстает во времени. Это отставание, вызванное наличием
нескольких емкостей, называется переходным или емкостным запаздыванием. Его
величина ![]() определяется отрезком,
который отсекает на оси времени касательная, проведенная к разгонной кривой в
точке, (А) где скорость изменения параметра достигает наибольшего значения. У
объектов с самовыравниванием эта точка является точкой перегиба, статической
характеристики, у астатических объектов касательной служит продолжение
прямолинейной части характеристики.
определяется отрезком,
который отсекает на оси времени касательная, проведенная к разгонной кривой в
точке, (А) где скорость изменения параметра достигает наибольшего значения. У
объектов с самовыравниванием эта точка является точкой перегиба, статической
характеристики, у астатических объектов касательной служит продолжение
прямолинейной части характеристики.
Переходное запаздывание ![]() тем больше, чем больше
число последовательно соединенных емкостей в объекте и чем больше величины
отдельных емкостей. У некоторых сложных объектов изменение параметра может
отставать во времени и не только по причине переходного запаздывания. В этом
случае внешнее воздействие сказывается на состоянии объекта не сразу, а спустя
некоторое время, необходимое для передачи воздействия к объекту.
тем больше, чем больше
число последовательно соединенных емкостей в объекте и чем больше величины
отдельных емкостей. У некоторых сложных объектов изменение параметра может
отставать во времени и не только по причине переходного запаздывания. В этом
случае внешнее воздействие сказывается на состоянии объекта не сразу, а спустя
некоторое время, необходимое для передачи воздействия к объекту.
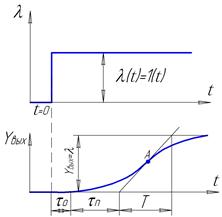
Рис. 6 - Разгонная характеристика ОР с транспортным запаздыванием
Так, например, после повышения числа
оборотов питателей пыли пройдет известное время, пока увеличенное количество
топлива пройдет по пылепроводам до топочной камеры и это скажется на режиме
работы котла. В течении этого времени параметр не изменяется вообще. Отрезок
времени между началом перемещения регулировочного органа и моментом, когда его
действие начнет сказываться на регулируемом объекте, называется передаточным
(транспортным или чистым) запаздыванием. Чистое запаздывание ![]() и переходное запаздывание
и переходное запаздывание ![]() составляет в сумме полное
запаздывание объекта:
составляет в сумме полное
запаздывание объекта:
![]()
Наибольшим переходным (емкостным) запаздыванием, при прочих равных условиях, обладают тепловые объекты регулирования, наименьшим – объекты, в которых регулируется расход жидкости или газа.
Методы графического определения времени разгона Та для многоемкостных ОР приведены на рис. 5 и 6.
Импульсные характеристики объектов регулирования
Длительное и значительное по величине воздействие, которое приходится наносить для получения разгонных характеристик объекта регулирования, вызывает длительные изменение режима его работы и потому не всегда допустимо на действующих установках. Сокращение величины воздействий при снятии разгонных характеристик целесообразно лишь до определенных пределов, ибо в противном случае наносимое воздействие окажется соизмеримым со случайными возмущениями, имеющими место во время проведения опыта. Если по производственным условиям длительное нарушение режима невозможно, то сокращают обычно не величину воздействия, а его длительность. В этом случае динамические свойства объекта могут быть определены не по разгонной, а по импульсной характеристике.
Импульсная характеристика
представляет собой кривую изменения регулируемого параметра в результате
временного импульсного воздействия, то есть такого импульса, когда нанесенное
ступенчатое воздействие спустя некоторый промежуток времени ![]() так же ступенчато полностью
снимается.
так же ступенчато полностью
снимается.
Импульсное воздействие можно
рассматривать как действие двух равных и противоположных по направлению
ступенчатых воздействий, из которых второе нанесено позднее первого на ![]() .
.
Импульсные характеристики для одноемкостных объектов регулирования. Для одноемкостного ОР без самовыравнивания, импульсная кривая имеет следующий вид (Рис. 7,а)
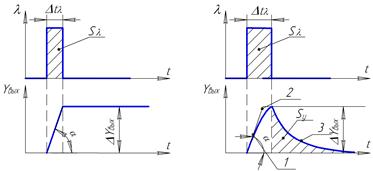
Рис. 7 - Импульсные характеристики одноемкостного ОР: а) без самовыравнивания, б) с самовыравниванием
В этом случае необходимо определить
лишь один параметр объекта - скорость разгона ![]() .
Она может быть определена, как и ранее, по тангенсу угла наклона прямой разгона
на участке Dt к оси времени, т.к.
.
Она может быть определена, как и ранее, по тангенсу угла наклона прямой разгона
на участке Dt к оси времени, т.к. ![]() (
(![]() при k=1).
при k=1).
Но ![]() ,
отсюда
,
отсюда ![]() ,
,
Или ![]() , где
, где ![]() , -площадь занятая
импульсом воздействия
, -площадь занятая
импульсом воздействия
Для одноемкостного ОР с
самовыравниванием импульсная характеристика будет иметь вид, приведенный на (Рис.
7,б). В этом случае необходимо определить не только скорость разгона ![]() (время разгона
(время разгона ![]() ), но и степень
самовыравнивания ОР-
), но и степень
самовыравнивания ОР-![]() (коэффициент
передачи
(коэффициент
передачи ![]() ).
).
Скорость разгона ![]() можно определить как для
одноемкостного ОР без самовыравнивания, но ее значение будет приближенным, так
как для ОР с самовыравниванием кривая (1) в интервале
можно определить как для
одноемкостного ОР без самовыравнивания, но ее значение будет приближенным, так
как для ОР с самовыравниванием кривая (1) в интервале ![]() экспонента, а не прямая.
экспонента, а не прямая.
Тогда ![]() ;
;
 .
.
После снятия импульсного воздействия
регулируемая величина возвращается к первоначальному значению (кривая 2).
Уравнение этой кривой является уравнением экспоненты ![]() , в котором искомые
, в котором искомые ![]() и
и ![]() .
.
Проинтегрируем это уравнение
 ,
,
знак (-) говорит о том, что кривая нисходящая,
![]() - площадь под экспонентой возврата
(3)
- площадь под экспонентой возврата
(3)
В конечных значениях ![]() , тогда
, тогда ![]() , но
, но ![]() , значит
, значит ![]() ,
, ![]() ;
; ![]() .
.
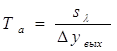
Импульсная характеристика многоемкостного ОР. На рис. 8 приведена импульсная характеристика многоемкостного ОР с самовыравниванием.
Реальный импульс воздействия обычно имеет не прямоугольную, а трапецеидальную форму, так как нанесение воздействия и его снятие совершаются с конечной, хотя и большой скоростью.
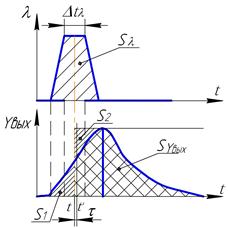
Рис. 8 - Импульсная характеристика многоемкостного ОР
Время емкостного запаздывания ![]() можно определить как
отрезок времени от (середины импульса) до точки перегиба восходящей ветви
импульсной характеристики. Точка перегиба легко определяется, так как она
отсекает площади
можно определить как
отрезок времени от (середины импульса) до точки перегиба восходящей ветви
импульсной характеристики. Точка перегиба легко определяется, так как она
отсекает площади ![]() и
и ![]() , равные между собой.
Определение величины
, равные между собой.
Определение величины ![]() ,
, ![]() ,
, ![]() указанным выше способом
тем точнее, чем короче импульс воздействия и чем больше при этом отклонение
регулируемой величины
указанным выше способом
тем точнее, чем короче импульс воздействия и чем больше при этом отклонение
регулируемой величины ![]() . Динамические
свойства объекта могут быть определены по его импульсной характеристике методом
достраивания импульсной характеристики до разгонной кривой или методом
планиметрирования импульсной характеристики (Рис. 9).
. Динамические
свойства объекта могут быть определены по его импульсной характеристике методом
достраивания импульсной характеристики до разгонной кривой или методом
планиметрирования импульсной характеристики (Рис. 9).
Метод достраивания импульсной
характеристики.
Разгонную характеристику можно построить по импульсной, пользуясь тем, что в
случае линейности статических характеристик объекта регулирования отклонение
регулируемого параметра, полученное в результате нескольких воздействий, равно
в каждый данный момент времени алгебраической сумме отклонений регулируемой
величины вследствие каждого из воздействий в отдельности. Это является
следствием аддитивности (или наложения) переходных функций. На этом основании
импульсную характеристику можно представить как алгебраическую сумму двух
одинаковых, но противоположных по направлению кривых отклонений параметра ![]() и
и ![]() , из которых вторая
запаздывает по сравнению с первой на
, из которых вторая
запаздывает по сравнению с первой на ![]() , то
есть на величину длительности действия импульсного воздействия.
, то
есть на величину длительности действия импульсного воздействия.
Построение разгонной характеристики по импульсной производят в следующем порядке.
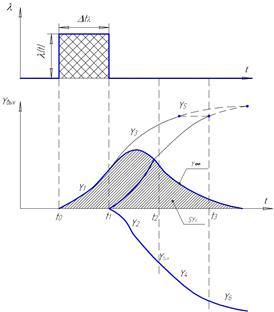
Рис. 9 - Обработка импульсной характеристики
На оси времени t отмечают отрезки времени ![]() и т.д.
и т.д.
На отрезке ![]() импульсная характеристика
совпадает с кривой разгона -
импульсная характеристика
совпадает с кривой разгона -![]() . С
момента времени
. С
момента времени ![]() начинается
кривая
начинается
кривая ![]() , участок которой на
отрезке времени от
, участок которой на
отрезке времени от ![]() до
до ![]() в точности соответствует
участку кривой
в точности соответствует
участку кривой ![]() на предыдущем
отрезке времени от
на предыдущем
отрезке времени от ![]() до
до ![]() . Кривая
. Кривая ![]() на отрезке времени от
на отрезке времени от ![]() до
до ![]() может быть достроена как
сумма кривых
может быть достроена как
сумма кривых ![]() и
и ![]() . По найденному
дополнительному отрезку
. По найденному
дополнительному отрезку ![]() продолжается
кривая
продолжается
кривая ![]() на отрезке времени
на отрезке времени ![]() и т.д. В результате
получают кривую разгона
и т.д. В результате
получают кривую разгона ![]() .
.
Метод планиметрирования импульсной
характеристики. В
некоторых производственных условиях, когда значительные нарушения режима особо
нежелательны, приходится ограничивать даже импульсное воздействие. При этом
допустимая длительность воздействия ![]() становится
настолько малой, что достраивание разгонной характеристики оказывается
громоздким и практически недостаточно точным. В этих случаях целесообразно
прибегнуть к другому способу обработки импульсной характеристики, а именно, к
определению параметров ОР непосредственно по величине площади, ограниченной импульсной
характеристикой. Имея ввиду представленные выше зависимости находят
становится
настолько малой, что достраивание разгонной характеристики оказывается
громоздким и практически недостаточно точным. В этих случаях целесообразно
прибегнуть к другому способу обработки импульсной характеристики, а именно, к
определению параметров ОР непосредственно по величине площади, ограниченной импульсной
характеристикой. Имея ввиду представленные выше зависимости находят
![]() ;
; ![]()
![]() - время переходного запаздывания,
при
- время переходного запаздывания,
при ![]() .
.
Постоянная времени объекта ![]() ;
;
Скорость разгона ![]() .
.
Частотные характеристики объектов регулирования
Частотные характеристики определяют путем приложения к ОР воздействия периодической гармонической формы. Схема получения частотных характеристик приведена на рис. 10.
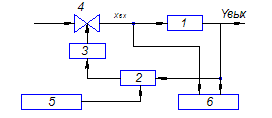
Рис. 10 - Схема получения частотных характеристик: 1- объект регулирования, 2- регулятор, 3- исполнительный механизм, 4- регулировочный орган, 5- генератор колебаний, 6- регистратор.
Для получения частотной характеристики нет необходимости размыкать главную обратную связь в АСР. Частотный сигнал подается на задатчик регулятора от генератора синусоидальных колебаний. При этом перемещения регулировочного органа также принимают гармоническую синусоидальную форму с определенной амплитудой и заданной частотой (Рис. 11).
![]() ,
,
![]() - амплитуда колебаний входного
сигнала
- амплитуда колебаний входного
сигнала
![]() -угловая частота воздействия (рад/сек
или рад/мин)
-угловая частота воздействия (рад/сек
или рад/мин)
Т- период колебаний, с или мин, зависящий от частоты воздействия.
Для определения частотной
характеристика ОР колебательные воздействия на входе объекта наносятся с
различными частотами. Спустя некоторое время после начала воздействий, когда
затухает переходный процесс – свободные колебания, на выходе ОР устанавливаются
вынужденные колебания выходного (регулируемого) параметра ![]() . При установившихся колебаниях
. При установившихся колебаниях
![]() сигнал на выходе объекта,
если он является линейным,
сигнал на выходе объекта,
если он является линейным, ![]() так же
изменяется по гармоническому закону с той же частотой
так же
изменяется по гармоническому закону с той же частотой ![]() , но его амплитуда
, но его амплитуда ![]() и сдвиг по фазе колебаний
могут изменятся в зависимости от динамических свойств объекта исследования.
и сдвиг по фазе колебаний
могут изменятся в зависимости от динамических свойств объекта исследования.
![]() ,
,
![]() - амплитуда выходных колебаний
- амплитуда выходных колебаний
![]() - сдвиг по фазе.
- сдвиг по фазе.
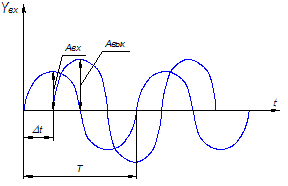
Рис. 11 - Синусоидальные изменения
сигналов ![]() и
и ![]()
Сигналы ![]() и
и
![]() подаются на регистратор.
Зависимость отношения амплитуды выходного сигнала к амплитуде входного
воздействия измеренных для одной частоты
подаются на регистратор.
Зависимость отношения амплитуды выходного сигнала к амплитуде входного
воздействия измеренных для одной частоты ![]() ,
от частоты колебаний входного сигнала называется амплитудно-частотной
характеристикой (АЧХ).
,
от частоты колебаний входного сигнала называется амплитудно-частотной
характеристикой (АЧХ).
![]() .
.
Зависимость сдвига фаз между выходными и входными сигналами для одной частоты от частоты колебаний входного гармонического сигнала называется фазно-частотной характеристикой (ФЧХ).
![]() ,
,
Комплекс частотных характеристик ![]() и
и ![]() названии комплексными
частотными характеристиками (КЧХ) или амплитудно-фазовой характеристикой (АФХ).
АФХ строятся в полярных координатах или на плоскости комплексных переменных в
декартовых координатах и представляют собой годограф вектора (кривая,
описываемая концом вектора), построенного из начала координат для различных
значений частот от
названии комплексными
частотными характеристиками (КЧХ) или амплитудно-фазовой характеристикой (АФХ).
АФХ строятся в полярных координатах или на плоскости комплексных переменных в
декартовых координатах и представляют собой годограф вектора (кривая,
описываемая концом вектора), построенного из начала координат для различных
значений частот от ![]() до
до ![]() . Модуль этого вектора
равен
. Модуль этого вектора
равен ![]() , а аргумент или угол
поворота -
, а аргумент или угол
поворота -![]() .
.
Запись АФХ в полярных координатах
![]() ,
,
![]() - модуль,
- модуль,![]() -фаза.
-фаза.
Для инженерных расчетов широко
применяется графическое изображение АФХ на комплексной плоскости в
прямоугольных координатах ![]() ,
, ![]() (Рис. 12)
(Рис. 12)
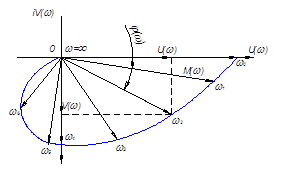
Рис. 12 - Амплитудно-фазовая характеристика
![]() ,
,
где ![]() -вещественная
часть вектора АФХ,
-вещественная
часть вектора АФХ,
![]() - мнимая часть вектора АФХ,
- мнимая часть вектора АФХ,
Длина вектора или его модуль
![]() ,
,
аргумент или угол поворота вектора вокруг начала координат
![]() .
.
Свойства ОР оказывают большое влияние
на процессы регулирования при сравнительно высоких частотах воздействия на
объект. Поэтому при экспериментальном определении частотных характеристик ОР
наибольшее количество опытных точек должно быть снято при сравнительно больших
значениях частоты ![]() . Наибольшая
частота, для которой определяется ЧХ объекта, называется частотой среза, при
которой колебания входного воздействия с наибольшей возможной в
экспериментальных условиях амплитудой Амакс обуславливают колебания
на выходе с амплитудой Амин, лежащей в пределах чувствительности
регулятора.
. Наибольшая
частота, для которой определяется ЧХ объекта, называется частотой среза, при
которой колебания входного воздействия с наибольшей возможной в
экспериментальных условиях амплитудой Амакс обуславливают колебания
на выходе с амплитудой Амин, лежащей в пределах чувствительности
регулятора.
Частотный метод исследования
регулятора позволяет автоматически поддерживать в среднем нормальный режим
работы объекта, при этом также отсутствует дрейф колебаний ![]() .
.
Создание строго синусоидальных колебаний на входе в объект требует специальных устройств-генераторов синусоидальных колебаний и вызывает значительные затруднения. Поэтому ЧХ определяют чаще при более простых видах воздействия – прямоугольных или трапецеидальных периодических импульсах. При таких воздействиях, называемых прямоугольной или трапецеидальной волной, отношение амплитуд и сдвиг фаз не будут соответствовать отношению амплитуд и сдвигу фаз при синусоидальных колебаниях. Поэтому по результатам эксперимента при такого вида воздействиях ЧХ могут быть построены лишь при специальной обработке опытных данных.
Частотные характеристики должны быть определены не только при регулирующем воздействии на ОР, но и при всех основных видах воздействий к ОР.
При снятии АФХ необходимо предварительно эксперименту выбрать диапазон частот входного воздействия. Этот диапазон определяется в основном целевым назначением АФХ. Если частотные характеристики предназначены для расчета АСР промышленного объекта, то интерес представляют значения АФХ при фазовых сдвигах 90-230º и требуется проведение опытов на 6-8 различных частотах.
Список литературы
1. Клименко А.В. Промышленная теплоэнергетика и теплотехника. Справочник Изд.: МЭИ, 2004 г.
2. Борисов Б.Г., Борисов К.Б., Бродянский В.М. Теплоэнергетика и теплотехника: справочник. Книга 4. Промышленная теплоэнергетика и теплотехника, 2004 г.
© 2010 Интернет База Рефератов