
Рефераты по сексологии
Рефераты по информатике программированию
Рефераты по биологии
Рефераты по экономике
Рефераты по москвоведению
Рефераты по экологии
Краткое содержание произведений
Рефераты по физкультуре и спорту
Топики по английскому языку
Рефераты по математике
Рефераты по музыке
Остальные рефераты
Рефераты по авиации и космонавтике
Рефераты по административному праву
Рефераты по безопасности жизнедеятельности
Рефераты по арбитражному процессу
Рефераты по архитектуре
Рефераты по астрономии
Рефераты по банковскому делу
Рефераты по биржевому делу
Рефераты по ботанике и сельскому хозяйству
Рефераты по бухгалтерскому учету и аудиту
Рефераты по валютным отношениям
Рефераты по ветеринарии
Рефераты для военной кафедры
Рефераты по географии
Рефераты по геодезии
Рефераты по геологии
Рефераты по геополитике
Рефераты по государству и праву
Рефераты по гражданскому праву и процессу
Рефераты по делопроизводству
Рефераты по кредитованию
Рефераты по естествознанию
Рефераты по истории техники
Рефераты по журналистике
Рефераты по зоологии
Рефераты по инвестициям
Рефераты по информатике
Исторические личности
Рефераты по кибернетике
Рефераты по коммуникации и связи
Реферат: Основы построения систем. Способы передачи и анализ телемеханических сигналов
Реферат: Основы построения систем. Способы передачи и анализ телемеханических сигналов
Основы построения систем.
Способы передачи и анализ телемеханических сигналов
Любая целенаправленная деятельность относительно каких-либо технологических объектов возможна в том случае, если существует система управления, содержащая необходимые функциональные узлы (рис. 1). Не имеет принципиальных отличий от указанной структуры и система диспетчерского управления движением поездов на участках железных дорог и станциях.
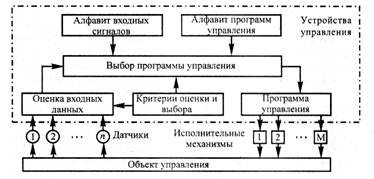
Рис. 1. Структурная схема системы управления
Выполнение целевых функций любой системы достигается, если между ее частями происходит обмен информацией, энергией и веществом. В зависимости от назначения системы и средств ее реализации три вида обмена одновременно могут не наблюдаться, однако информационные и энергетические взаимодействия для рассматриваемого класса устройств являются обязательными.
На железнодорожном транспорте получили широкое распространение следующие способы информационного и энергетического взаимодействия между территориально разобщенными частями системы управления технологическими объектами.
При местном способе информационные преобразования осуществляются только в пункте управления и в результате выработанных команд на объекты управления по индивидуальным линейным проводам подается вся энергия, необходимая исполнительным механизмам (рис. 2).

Рис.2. Структурная схема местного управления
Контроль состояния исполнительных механизмов выполняется по отдельным проводам и используется энергоресурс пункта управления. Такой способ взаимодействия с объектом является основным в системах электрической централизации с центральными зависимостями и центральным питанием.
Основные недостатки, ограничивающие область использования рассмотренного способа: небольшая дальность управления (единицы километров) и большой расход кабеля с различным поперечным сечением проводов (в зависимости от передаваемой мощности) для индивидуальных цепей.
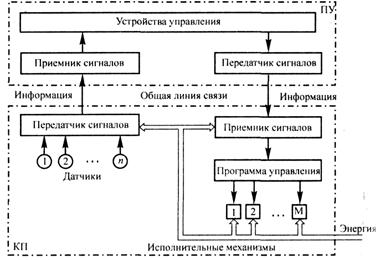
Отмеченные недостатки менее ощутимы при использовании так называемого дистанционного способа управления объектами (рис.3).
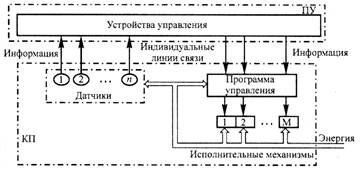
Рис. 3. Структурная схема дистанционного управления
При этом способе пункт управления (ПУ) взаимодействует с устройствами контролируемого пункта (КП) только на уровне информационного обмена по индивидуальным для каждого сообщения линейным проводам.
Исполнительные механизмы получают необходимую энергию от местного источника в соответствии с командами пункта управления. Сравнительно небольшие мощности передаваемых информационных сигналов позволяют существенно увеличить дальность управления и сократить расход кабеля на организацию взаимодействия в системе. Дистанционный способ получил широкое распространение в системах электрической централизации с местным питанием и в устройствах перегонной автоматики.
 |
С увеличением зоны управления, т.е. с ростом числа групп объектов и расстояний между ними, в системе управления используют телемеханические способы взаимодействия (рис. 4). Такой способ обмена информацией в системах управления обеспечивает передачу всей совокупности сообщений между пунктами по общей линии (каналу) связи при энергетической независимости каждого пункта при энергетической независимости каждого пункта.
Рис. 4. Структурная схема телемеханического управления
Таким образом, основу телемеханики составляют устройства, позволяющие различными способами независимо передавать многие дискретные сообщения по общим линиям связи любой протяженности.
В зависимости от назначения передаваемой информации принято различать телемеханические системы телеуправления (ТУ), телесигнализации (ТС) и телеизмерения (ТИ) (рис. 5.)
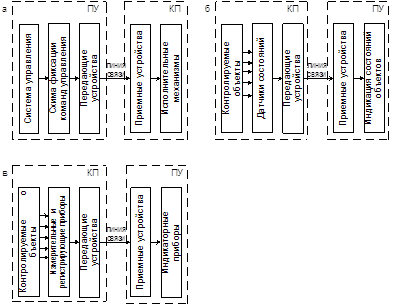
Рис.5. Структурные схемы систем телеуправления (а). телесигнализации (б) и телеизмерения (в)
Практически любая система телемеханики представляет собой определенную комбинацию перечисленных устройств. На железнодорожном транспорте для диспетчерского управления наибольшее распространение получили системы ТУ-ТС. В последнее время для диагностирования состояния устройств они стали дополняться и аппаратурой ТИ, т.е. приобретают структуру ТУ-ТС-ТИ.
Территориально объекты системы телемеханики могут быть разно размещены относительно пункта управления. Поэтому телемеханическая сеть - совокупность устройств телемеханики и объединяющих их каналов связи - выполняется по радиальной (рис. 6,а), цепочечной (рис. 6, б) или радиально-цепочечной (рис. 6, в) структуре. На железнодорожном транспорте эти структуры наиболее распространены, хотя возможна реализация и более сложных древовидных структур (рис. 6, г).
Системы телемеханики любой структуры реализуются с использованием линий связи, в качестве которых может выступать та или иная физическая среда, способная передавать сигналы. В современных системах телемеханики чаще всего применяются проводные линии (выделенные или совмещенные с энергоснабжением), радиопункты и световодные линии.
По любой линии связи может быть организовано определенное число каналов для независимой передачи сообщений. При передаче сигналов телемеханики такой канал принято называть телемеханическим.
Телемеханические каналы являются средством объединения в систему источника и получателя сообщений.
Источники информации разнообразны, рассредоточены в пространстве, могут иметь детерминированное и неопределенное число состояний. Соответственно и организация устройств телемеханики различна для сосредоточенных и рассредоточенных объектов, для отражения их дискретного или непрерывного множества состояний. Любое изменение внутреннего состояния объектов контроля принято считать событием. О каждом событии контролирующий пункт должен получить сообщение. Сообщение, порожденное событием на передающем конце, должно быть, определенным образом доставлено получателю. Передача сообщений в системах телемеханики происходит по каналам связи, где в роли переносчика сообщений выступает переменный или постоянный ток. Поэтому переносчик с нанесенным на него сообщением уже представляет собой сигнал. Разумеется, что каждое сообщение образует свой собственный сигнал, отличный от других. Это необходимо для различения сообщений на приемном конце по виду сигналов.

Для упрощения процедур организации сигналов и выделения из них сообщений стремятся использовать ограниченное число признаков переносчика. Если число сообщений превышает число используемых признаков, каждому сообщению соответствует сложный сигнал, состоящий из определенной совокупности этих признаков, используемых на определенных интервалах времени.
Интервал времени, в течение которого признак переносчика не меняется, называют импульсом сложного сигнала, а используемые характеристики переносчика — импульсными признаками.
Любой сложный сигнал на приемном конце может быть правильно понят, если будет выделен каждый импульс сигнала и произойдет запоминание его качества (т.е. импульсного признака) на время, достаточное для определения известных приемнику свойств всей совокупности импульсов сложного сигнала. Каждой такой совокупности импульсов сложного сигнала соответствует вполне определенное сообщение. Поэтому, если правильно принят сложный сигнал, правильно будет понято переданное сообщение. Процесс образования сложного сигнала, соответствующего определенному сообщению, называют кодированием, а обратные преобразования на приемном конце — декодированием.
Таким образом, в системах телемеханики всегда наблюдается определенная последовательность информационных преобразований, обусловленная необходимостью оптимального согласования отдельных частей системы. В любом случае на передающем конце каждое сообщение преобразуется в эквивалентный сигнал для согласования источника сообщений с каналом связи, а на приемном конце из сигнала выделяется соответствующее сообщение.
Сложность этих преобразований зависит от соотношения количества информации, от источника сообщений и пропускной возможности используемого канала, так как этим определяется выбор импульсных признаков и закона преобразования сигналов.
Первичные преобразователи, реагирующие на изменение физического параметра (механического, электрического, оптического, теплового, химического и т.п.) источника сообщений, принято называть датчиками, а все последующие — информационными преобразователями.
В любом преобразователе происходит отображение множества входных сигналов в эквивалентное множество выходных с изменением формы представления сигналов. Это позволяет любую систему телемеханики рассматривать как определенную последовательность информационных преобразователей, видоизменяющих сигналы. Например, сигналы х2 , с выходов датчиков (рис. 7) в кодирующем устройстве преобразуются в форму х3, удобную для согласования с возможностями канала, после чего модулятор преобразует кодированную запись сообщения х1, в линейный сигнал х4, т.е. выполняет модуляцию переносчика в соответствии с передаваемым сообщением. На приемном конце проводятся обратные преобразования сигналов для представления информации в наиболее удобной форме.

Рис. 7. Схема информационных преобразований в системах
Таким образом, для каждого преобразователя нужно уметь задавать взаимосвязь между входами и выходами в соответствующей математической форме, а также описывать сигнал любого вида.
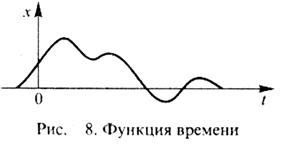
Чаще всего для описания сигналов используют функцию времени (рис.8), так как изменение физических параметров сигналов удобно наблюдать во времени. Если изменения наблюдаемых параметров происходят дискретно во времени, то и сигналы получают дискретную форму.
При непрерывном изменении параметров во времени сигналы могут быть аналоговыми или после дополнительных преобразований (квантование) — дискретными
Сигналы как функции времени у = х(t) графически удобно представлять совокупностью точек определенной кривой в двухмерном пространстве прямоугольных координат х и t (см. рис.8). Однако не во всех случаях такое представление сигналов оказывается достаточным и наглядным, в особенности для изучения свойств совокупности сложных сигналов. В этих случаях используют сложные пространства сигналов, в которых каждый сигнал изображается точкой в этом многомерном пространстве. Иными словами, все сигналы, обладающие свойствами Р, образуют множество сигналов S, т.е. S = {х; Р}. В другой форме эта же взаимосвязь может быть записана так: Р => х є S, т.е. Р верно для х, принадлежащего S.
Таким образом, определяя Р, задают нужное множество сигналов. Оперируя множествами, в теории сигналов широко используют операции объединения и пересечения.
Объединение множеств S1 и S 2 (рис. 10, а) представляется как:
![]()
а пересечение (рис. 10, б) как:

![]()
Рис. 10. Пересекающиеся и непересекающиеся множества и подмножества
Операторы ![]() и
и ![]() используются также для
разбиения множества на ряд непересекающихся подмножеств (рис. 10,в) т.е.
используются также для
разбиения множества на ряд непересекающихся подмножеств (рис. 10,в) т.е. ![]()
![]() ,
если
,
если![]() для,
для, ![]() где 0 - знак пустого множества.
где 0 - знак пустого множества.
Для получения более удобных узких подмножеств обычно используют разбиения с помощью отношения эквивалентности, выражаемого следующими свойствами: х ~ х для любого х (свойство рефлексивности); х ~ у => у ~ х (симметрия); х ~ у и у ~ z => х (транзитивность).
Более
общий способ установления отношений между элементами множеств состоит в
отображении элементов одного множества на элементы другого по определенному
правилу, т.е. отображение - это правило, по которому элементам множества S1 (рис.11) ставятся в соответствие
элементы множества S2.
Символически это записывается как f : ![]() , что означает у =
f (х),
, что означает у =
f (х), ![]() , т.е. у -
образ х в S 2 при отображении f.
, т.е. у -
образ х в S 2 при отображении f.
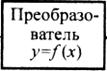
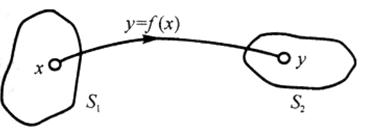
Рис. 11. Отображение сигналов
При
взаимно однозначных отображениях используют и обратное отображение S2 на S1, т.е. ![]() , а также составные или
последовательные отображения (рис. 12), т.е.
, а также составные или
последовательные отображения (рис. 12), т.е. ![]()
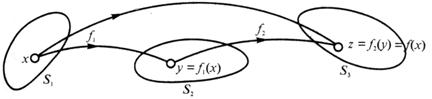
Рис. 12. Составное отображение
Любое отношение эквивалентности может быть выражено как отображение, а любое отображение порождает отношение эквивалентности.
Наиболее широко применяемым в теории сигналов является отображение, называемое преобразованием Фурье:
 (1)
(1)
где:
Обратное отображение задаётся соотношением:
 (2.)
(2.)
Соотношения (2.1) и (2.2) являются парой преобразований Фурье, причем первое из них выражает так называемую спектральную плотность сигнала (частотный спектр).
Любой сигнал конечной длительности ![]() или
периодический сигнал
или
периодический сигнал ![]() могут быть
представлены совокупностью периодических (гармонических) составляющих (рис. 13)
в соответствии с разложением в ряд Фурье.
могут быть
представлены совокупностью периодических (гармонических) составляющих (рис. 13)
в соответствии с разложением в ряд Фурье.
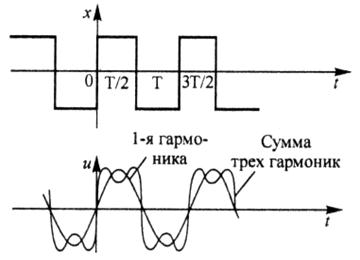
Рис. 13. Представление сигналов гармоническими составляющими
Коэффициенты разложения определяются функционалами:
где: ![]()
Другим широко
используемым способом представления любого сигнала является его представление
временным рядом, т.е. конечным набором функций, описывающих интерполирующий
импульс ![]() (рис. 14, а) при
разных его смещениях по оси времени (рис. 14, б). Обычно такой импульс
удовлетворяет условиям:
(рис. 14, а) при
разных его смещениях по оси времени (рис. 14, б). Обычно такой импульс
удовлетворяет условиям:
![]()
![]()
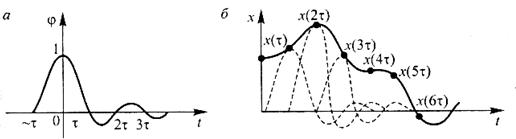 |
Рис. 14. Представление сигналов временным рядом
Сигналы с ограниченной частотой изменения![]() представляют дискретным
набором отсчетов через равностоящие промежутки времени (рис. 15) в соответствии
с теоремой Котельникова (теорема отсчетов), т.е. для любого
представляют дискретным
набором отсчетов через равностоящие промежутки времени (рис. 15) в соответствии
с теоремой Котельникова (теорема отсчетов), т.е. для любого
![]()
Кроме указанных способов представления произвольных сигналов существует множество других, например разложения по полиномам Лежандра, Чебышева, Лагерра, функциям Бесселя, Хаара и др.
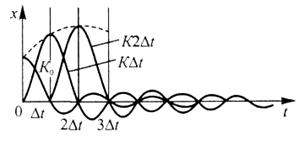
Рис. 15 Представление сигналов дискретными отсчетами
Таким образом, для описания любых детерминированных во времени
сигналов существуют различные методы. Однако в реальных системах часто
приходится иметь дело со случайными сигналами, т.е. с такими функциями времени,
значения которых лежат в определенном диапазоне и появление любой из них имеет
определенную вероятность (стохастический процесс) ![]() где
где ![]() рассматривается как
вектор в гильбертовом пространстве, образуемом точками по параметру t.
рассматривается как
вектор в гильбертовом пространстве, образуемом точками по параметру t.
В таких системах стремятся определить не конкретное значение сигнала (отдельная реализация), а вычислить статистические средние значения по отношению к случайным переменным (математическое ожидание). Тогда случайный процесс во времени характеризуется детерминированной во времени функцией от различных ожиданий, а не формой конкретных сигналов. В этом состоит принципиальное различие в описаниях детерминированных и случайных сигналов.
Для сравнительной оценки сигналов одного множества по каким-либо свойствам каждой паре элементов множества ставится в соответствие действительное положительное число, называемое расстоянием между элементами.
Расстояния во множестве, представляющем пространство сигналов, определяют по условному правилу, называемому метрикой данного пространства. Метрика должна удовлетворять следующим условиям:
![]() т.е. расстояние неотрицательно;
т.е. расстояние неотрицательно;
![]() т.е. расстояние от х до у равно
расстоянию от у до х (симметрия);
т.е. расстояние от х до у равно
расстоянию от у до х (симметрия);
![]() т.е. длина одной стороны треугольника
векторов не может быть больше суммы двух других.
т.е. длина одной стороны треугольника
векторов не может быть больше суммы двух других.
Для одного и того же множества элементов по разным метрикам могут
быть образованы разные метрические пространства. Например, если принять ![]() и
и ![]() то расстояние в
трехмерном пространстве (Евклидова метрика)
то расстояние в
трехмерном пространстве (Евклидова метрика)
Из этого же множества элементов может быть образовано пространство, определяемое по метрике Хэмминга, т.е.
В этом случае расстояние между любой парой слов определяется числом несовпадающих символов (суммирование по модулю 2) по всем разрядам. Эта метрика широко применяется для сравнения кодов по возможностям обнаружения и исправления ошибок.
Кодирование. Сообщения, подлежащие передаче по каналу связи, должны быть
представлены в форме, наиболее удобной для передачи по данному каналу. Таким
образом, подразумевается преобразование одного исходного пространства сигналов
в эквивалентное ему. Подобное преобразование проходит в два этапа. Первоначально
из избыточного множества сигналов![]() следует
выделить подмножество
следует
выделить подмножество ![]() , содержащее
М нужных сигналов. Затем их необходимо поставить в однозначное
соответствие с исходными сигналами. Первый этап может быть осуществлен
, содержащее
М нужных сигналов. Затем их необходимо поставить в однозначное
соответствие с исходными сигналами. Первый этап может быть осуществлен![]() различными способами,
а второй — М! Таким образом, общее число возможных правил кодирования
различными способами,
а второй — М! Таким образом, общее число возможных правил кодирования ![]() .
.
Подмножество ![]() выбранное
по любому из К правил, составляет код. По ГОСТ 26.014 — 81 код
совокупность условных сигналов, обозначающих дискретные сообщения.
выбранное
по любому из К правил, составляет код. По ГОСТ 26.014 — 81 код
совокупность условных сигналов, обозначающих дискретные сообщения.
Символическая запись сложного сигнала из подмножества ![]() представляет собой кодовую
комбинацию (кодовую последовательность). Вид записи комбинации зависит от
системы счисления, используемой для рассматриваемого кода, так как любая
комбинация это число, записанное в определенной системе счисления.
представляет собой кодовую
комбинацию (кодовую последовательность). Вид записи комбинации зависит от
системы счисления, используемой для рассматриваемого кода, так как любая
комбинация это число, записанное в определенной системе счисления.
Основание системы счисления состоит из конечного набора цифр (символов), из комбинаций которых может быть образовано любое число. Так, основание наиболее привычной в обычной жизни десятичной системы счисления содержит 10 цифр (0 — 9), а основание наиболее распространенной в технике передачи и обработки данных двоичной системы составляют цифры 0 и 1.
Любое число в системе счисления с основанием х может быть представлено многочленом:
![]()
где: a — знаки основания от 0 до х - 1.
Например, десятичное число 169 в двоичной системе записывается так:

или
F(х) = 10101001
Обычно при записи двоичного числа в виде многочлена опускают члены с коэффициентом 0 и не пишут множители 1, т. е. для числа 169 получаем:
F(х) = х7 + х5 + х3 + 1.
Представление кодовых комбинаций в виде многочленов широко используется благодаря возможности проводить над ними обычные алгебраические операции при анализе свойств кода. Однако для сохранения заданного кодом числа разрядов при сложении любых комбинаций используется сложение по модулю 2, т.е. по следующим правилам:
![]()
Пространство сигналов, построенное в соответствии с этими требованиями, удовлетворяет метрике Хэмминга
Действительно, при
использовании n разрядов в комбинации возможно всего
![]() комбинаций. Сложение любых
двух (или большего числа) комбинаций по модулю 2 дает комбинацию из указанной
совокупности. Данные коды называются систематическими. Если в
коде используются всевозможные комбинации, то некоторые отличаются друг от
друга только в одном разряде, т.е. по Хеммингу расстояние d=1. Такие коды являются непомехозащищенными, так
как искажение какого-либо разряда помехами (любого происхождения) приводит к
другой разрешенной комбинации.
комбинаций. Сложение любых
двух (или большего числа) комбинаций по модулю 2 дает комбинацию из указанной
совокупности. Данные коды называются систематическими. Если в
коде используются всевозможные комбинации, то некоторые отличаются друг от
друга только в одном разряде, т.е. по Хеммингу расстояние d=1. Такие коды являются непомехозащищенными, так
как искажение какого-либо разряда помехами (любого происхождения) приводит к
другой разрешенной комбинации.
Однако, если выбрать для использования только комбинации с расстоянием d=2, одиночные искажения в комбинациях легко обнаруживаются. Такая совокупность комбинаций будет уже представлять код с обнаружением одиночных ошибок. Коды с расстоянием d = 2 называются помехозащищенньми. Они подразделяются на две группы: коды с обнаружением ошибок (пассивная помехоустойчивость); коды с обнаружением и исправлением ошибок (активная помехоустойчивость), т.е. корректирующие коды.
По числу разрядов, используемых в кодовых комбинациях, коды могут быть равномерными и неравномерными, т.е. содержащими одинаковое или разное число элементов в комбинациях.
Непомехозащищенные коды (группа кодов с кодовым расстоянием d = 1) получили достаточно широкое распространение в телемеханических системах, несмотря на низкую помехозащищенность.
Наиболее известными представителями этой группы являются группы Морзе, Бодо, Грея, международный телеграфный и двоичнодесятичный коды.
В коде Морзе используются комбинации двух символов — точка и тире, разделяемые паузой. Длительности точки и паузы между элементами одной комбинации одинаковы, а длительность тире в 3 раза больше. Число элементов (и время передачи) в комбинациях колеблется в широких пределах, что является серьезным недостатком кода Морзе.
Код Бодо более удобен, так как он является равномерным и содержит пять элементов в каждой комбинации.
Для уменьшения влияния помех в отдельных разрядах при передаче цифровых данных используется код Грея, соседние комбинации в котором отличаются только в одном разряде. Такие коды широко применяют при передаче результатов телеизмерений.
Двоично-десятичные непомехозащищенные коды нашли применение в системах передачи данных и вычислительной технике. В этих кодах каждый десятичный разряд представляется четырехразрядной комбинацией двоичного кода. Например, цифра 1 представляется как 0001, а цифра 9 — как 1001. Нетрудно заметить, что запись многоразрядных десятичных цифр двоично-десятичным кодом поучается весьма громоздкой. Для сокращения числа разрядов используют различные приемы.
Помехозащищенные коды предполагают, что из множества ![]() различных слов
(комбинаций) для использования выбраны только такие, для которых
различных слов
(комбинаций) для использования выбраны только такие, для которых![]() . Выбор такого
подпространства
. Выбор такого
подпространства ![]() с нужными
свойствами из пространства сигналов
с нужными
свойствами из пространства сигналов ![]() представляет
собой задачу выбора кода, оптимального по какому-либо определенному критерию.
Чаще всего таким критерием является именно кодовое расстояние d при ограничениях на число
разрядов п и т. Широко используются следующие постановки задачи:
представляет
собой задачу выбора кода, оптимального по какому-либо определенному критерию.
Чаще всего таким критерием является именно кодовое расстояние d при ограничениях на число
разрядов п и т. Широко используются следующие постановки задачи:
выбрать из множества ![]() заданное
число М комбинаций с максимально возможным кодовым расстоянием d;
заданное
число М комбинаций с максимально возможным кодовым расстоянием d;
выбрать из множества ![]() максимальное
число комбинаций
максимальное
число комбинаций ![]() с заданным
кодовым расстоянием d;
с заданным
кодовым расстоянием d;
найти такой оператор, который однозначно трансформирует m-значные комбинации в п-значные
(![]() ) и обеспечивает максимальное
кодовое расстояние для данного вида преобразований.
) и обеспечивает максимальное
кодовое расстояние для данного вида преобразований.
Наиболее широко используются в телемеханических системах коды,
получаемые в результате линейных преобразований m -значных комбинаций в п-значные
(![]() ), называемые поэтому линейными.
), называемые поэтому линейными.
Линейное преобразование в пространстве X обладает следующими свойствами:
![]()
т.е.
![]()
где:![]() -
произвольные векторы из пространства X;
-
произвольные векторы из пространства X; ![]() произвольные скалярные
величины.
произвольные скалярные
величины.
Множество всех линейных преобразований некоторого линейного пространства само является линейным пространством, в котором определены векторное сложение и умножение на скаляр:
для всех х X.
Операция сложения схемно легко реализуется в виде параллельного соединения, а умножение — последовательным соединением соответствующих блоков, выражающих указанные операторы.
Линейные коды с избыточностью (корректирующие коды) строятся добавлением к каждой m-значной комбинации исходного кода k проверочных символов, выбираемых по определенному правилу (линейной форме).
Комбинации ![]() корректирующих
кодов в общем виде записываются следующим образом:
корректирующих
кодов в общем виде записываются следующим образом:
![]()
![]()
где:![]() - информационные
символы 1-й комбинации исходного кода;
- информационные
символы 1-й комбинации исходного кода;
![]() — проверочные символы.
— проверочные символы.
Коэффициенты ![]() могут
иметь значения 0 и 1, суммирование проводится по модулю 2.
могут
иметь значения 0 и 1, суммирование проводится по модулю 2.
Корректирующие возможности кода зависят от кодового расстояния, косвенно отражаемого
в форме общей записи числом проверочных символов![]() .
В табл 1 приведена система кодовых слов при минимальном для помехозащищенных
кодов расстоянии d = 2.
.
В табл 1 приведена система кодовых слов при минимальном для помехозащищенных
кодов расстоянии d = 2.
Таблица.1
|
|
|
|
|
|
|
|
|
|
|
|
|
0 | 0 | 0 | 0 |
|
1 | 0 | 0 | 1 |
|
|
0 | 0 | 1 | 1 |
|
1 | 0 | 1 | 0 |
|
|
0 | 1 | 0 | 1 |
|
1 | 1 | 0 | 0 |
|
|
0 | 1 | 1 | 0 |
|
1 | 1 | 1 | 1 |
Разряд![]() является
проверочным на четность по правилу
является
проверочным на четность по правилу ![]() .
.
Из примера видно, что появление ошибки в любом разряде может быть
обнаружено, так как возникает комбинация не из набора разрешенных![]() . Добавляя проверочные
разряды, можно поучить множество комбинаций с кодовым расстоянием d > 2, что позволяет не только
обнаруживать ошибки, но и исправлять их (корректировать).
. Добавляя проверочные
разряды, можно поучить множество комбинаций с кодовым расстоянием d > 2, что позволяет не только
обнаруживать ошибки, но и исправлять их (корректировать).
Например, множество кодовых слов с d=3 (табл. 2.2) обладает возможностью обнаруживать и исправлять ошибку в одном разряде или же только обнаруживать ошибки в двух разрядах.
Разряды
![]() ;
;
![]() ;
;
![]()
являются проверочными на четность.
Таблица 2
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
0 | 0 | 0 | 0 | 0 | 0 | 0 |
|
1 | 0 | 0 | 0 | 1 | 1 | 0 |
|
|
0 | 0 | 0 | 1 | 1 | 1 | 1 |
|
1 | 0 | 0 | 1 | 0 | 0 | 1 |
|
|
0 | 0 | 1 | 0 | 0 | 1 | 1 |
|
1 | 0 | 1 | 0 | 1 | 0 | 1 |
|
|
0 | 0 | 1 | 1 | 1 | 0 | 0 |
|
1 | 0 | 1 | 1 | 0 | 1 | 0 |
|
|
0 | 1 | 0 | 0 | 1 | 0 | 1 |
|
1 | 1 | 0 | 0 | 0 | 1 | 1 |
|
|
0 | 1 | 0 | 1 | 0 | 1 | 0 |
|
1 | 1 | 0 | 1 | 1 | 0 | 0 |
|
|
0 | 1 | 1 | 0 | 1 | 1 | 0 |
|
1 | 1 | 1 | 0 | 0 | 0 | 0 |
|
|
0 | 1 | 1 | 1 | 0 | 0 | 1 |
|
1 | 1 | 1 | 1 | 1 | 1 | 1 |
В общем виде корректирующие возможности кодов с ![]()
![]() могут быть
охарактеризованы выражением
могут быть
охарактеризованы выражением
d = r + s + 1,
где: r — число обнаруживаемых ошибок; s - число исправляемых ошибок.
Например, при d = 4 код может обнаружить две и исправить одну ошибку (r = 2, s = l) или же обнаружить три ошибки ( r = 3, s = 0).
Синтез линейных кодов с заданными свойствами обычно осуществляется
кодирующими устройствами (рис. 16, а), которые сравнительно просты, так
как содержат только ячейки регистра сдвига (![]() ) и сумматор
по модулю 2. К сумматору подключаются выходы тех ячеек регистра, для которых
) и сумматор
по модулю 2. К сумматору подключаются выходы тех ячеек регистра, для которых ![]() = 1 в соответствии с
выбранными линейными формами кода. От вида кода может изменяться не только
число связей
= 1 в соответствии с
выбранными линейными формами кода. От вида кода может изменяться не только
число связей![]() , но и число
сумматоров.
, но и число
сумматоров.
Рассмотрим для примера
структуру кодирующего устройства для образования линейною кода c d=3 (обычно называемого кодом
Хэмминга) при трех информационных и трех контрольных символах (рис. 16, б). В
ячейки 1-3 регистра памяти вводятся исходные информационные символы ![]() . Далее проводится сдвиг всех символов на один такт, в
результате чего в ячейку 3 записывается сумма по модулю 2 первого и второго
информационных символов. После второго сдвига в ячейке 1 будет
. Далее проводится сдвиг всех символов на один такт, в
результате чего в ячейку 3 записывается сумма по модулю 2 первого и второго
информационных символов. После второго сдвига в ячейке 1 будет ![]() , в ячейке 2-
, в ячейке 2-![]() , а в ячейке 3-
, а в ячейке 3-![]() . Третий такт сдвига приводит к тому, что в ячейках регистра окажется комбинация
проверочных символов к исходной комбинации кода.
. Третий такт сдвига приводит к тому, что в ячейках регистра окажется комбинация
проверочных символов к исходной комбинации кода.
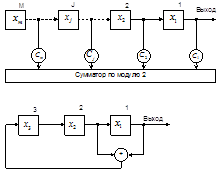
Рис. 16. Структурные схемы кодирующих устройств для линейных кодов.
При использовании циклического сдвига и выборе линейных форм в соответствии с так называемыми порождающими многочленами образуются циклические коды, в которых каждая комбинация представляет собой блок из информационных и контрольных символов на определенных местах.
Циклические коды позволяют обнаруживать и исправлять любые ошибки в зависимости от выбранного порождающего (образующего, генераторного) полинома. Образуют циклические коды с теми или иными корректирующими свойствами, беря комбинации двоичного кода на все сочетания и умножая их на образующий многочлен. Для систематизации таких кодов с целью закрепления мест информационных и контрольных символов используют дополнительные операции умножения и деления многочленов.
В системах телемеханики на железнодорожном транспорте и помехозащищенных кодов нашли широкое применение коды на одно сочетание (d = 2, r = 1, х = 0). Такие коды, кроме одиночных ошибок, обнаруживают также однотипные ошибки более высокой кратности.
Поскольку в таких кодах контролируется постоянное число единиц и нулей в комбинации, то их часто называют кодами с постоянным весом.
Общее число разрешенных комбинаций в таком коде зависит от числа сочетаний

или
где: п - число разрядов в комбинации; т - число единиц в комбинации.
Разновидностью кода с постоянным весом является широко используемый распределительный код (рис. 17), имеющий вес, равный единице (в любой комбинации длиной п содержится только одна 1).
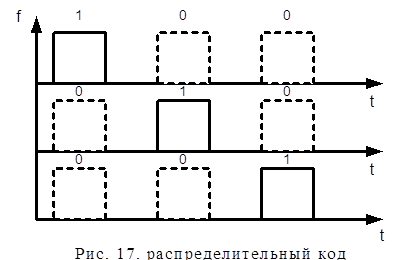
Обычно в системах телемеханики распределительный код используется в одной (исполнительной) части комбинации, тогда как другую (избирательную) часть представляет код с большим числом единиц.
Например, в
тракте ТУ системы СКЦ избирательная часть (адрес группы объектов) содержит![]() комбинаций, а исполнительная
(номер команды) представлена распределительным кодом.
комбинаций, а исполнительная
(номер команды) представлена распределительным кодом.
При оценке
свойств кодов, кроме кодового расстояния d часто используют коэффициент
избыточности![]() вычисляемый как отношение
общего числа возможных комбинаций Мп при заданном числе элементов
п к рабочему числу кодовых комбинаций Мm, т.е.
вычисляемый как отношение
общего числа возможных комбинаций Мп при заданном числе элементов
п к рабочему числу кодовых комбинаций Мm, т.е.

где: ![]() - число
нерабочих (запрещенных) кодовых комбинаций, используемых только в контрольных
целях.
- число
нерабочих (запрещенных) кодовых комбинаций, используемых только в контрольных
целях.
Например, для широко применяемых кодов на одно сочетание ![]() т.е.
с постоянным числом единиц и нулей в комбинации, коэффициент избыточности
т.е.
с постоянным числом единиц и нулей в комбинации, коэффициент избыточности
Избыточность в комбинациях кода может быть образована двумя способами:
выбором для использования из общего числа возможных комбинаций только некоторых с определенными свойствами;
добавлением контрольных символов ко всем возможным комбинациям кода для придания им нужных свойств.
Примером кодов, образованных по последнему способу, может служить корреляционный
код (код с удвоением элементов). В этом случае каждый элемент двоичного
кода на все сочетания представляется двумя символами, т.е. 1 соответствует 10,
а ![]() . Конечно, избыточность
такого кода велика, так как происходит удвоение числа элементов, но и
помехоустойчивость тоже резко возрастает (обнаруживаются одиночные ошибки в
любом числе удвоенных элементов комбинации).
. Конечно, избыточность
такого кода велика, так как происходит удвоение числа элементов, но и
помехоустойчивость тоже резко возрастает (обнаруживаются одиночные ошибки в
любом числе удвоенных элементов комбинации).
Таким образом, представление любого исходного множества двоичных сигналов эквивалентным ему множеством кодовых комбинаций (с любым основанием) составляет суть кодирования. Кодирование выполняется в устройствах телемеханики в целях наилучшего согласования источника двоичных сообщений с возможностями канала связи для получения на приемном конце точного и быстрого отображения состояния источника.
Разумеется, для правильного выбора кода надо знать информационные характеристики источника сообщений и характеристики используемого канала связи.
Физические характеристики канала и сигнала. Обычно телемеханические сигналы передаются посылками электрического тока по проводным линиям связи, но иногда используется и радиоканал. В обоих случаях перенос электромагнитной энергии сигналов непосредственно зависит от свойств канала. Из множества этих свойств три параметра, произведение которых составляет объем (емкость) канала, характеризуют его количественные возможности:
![]()
где: Тк - время, на которое канал предоставлен отправителю сообщения; Fк - полоса частот пропускания канала; Нк - допустимая электрическая мощность сигнала, передаваемого по каналу.
Аналогично может быть представлен и объем передаваемого сигнала, т.е.
![]()
где: Тс - длительность импульса сигнала; Fс - ширина спектра частот сигнала; Hс=logPс/Pn – превышение уровня сигнала рс над уровнем помех рп
Нормальная передача сигналов возможна только при правильном согласовании Vс и Vк. Это означает, что всегда должно выполняться не только условие Vс ≤ Vк, но и Тс ≤ Тк, Fс ≤ Fк, Нс ≤ Hк.
Таким образом, согласование сигнала с каналом сводится к уменьшению одного параметра (Т, F, Н) и пропорциональному увеличению другого с сохранением общего объема Vс ≤ Vк. Подобные преобразования проводятся при выборе способа передачи сигналов по данному каналу. Однако кодирование может изменять исходный объем сигналов, подлежащих передаче. Вместе с этим изменяются эффективность и помехоустойчивость передачи.
Следует подчеркнуть, что Vк характеризует максимальное количество информации, которое можно передать по каналу за время Тк, при заданных ограничениях мощности передаваемого сигнала. По определению К.Э. Шеннона, максимальная скорость передачи информации при рс рп
Использование канала для передачи максимального объема информации с требуемой достоверностью –основная задача при создании любой системы телемеханики. Имеются различные подходы для достижения максимального использования возможностей канала по Fк и Тк при постоянном Hк.
Частотное разделение сигналов. Всю полосу частот канала Fк разбивают на число имеющихся двоичных сигналов и с тем, чтобы каждый из них независимо от других передавался на своей частоте (рис. 18, а). Подобный способ технически легко осуществить только при сравнительно малом числе сигналов, так как различать близкие частоты сложно.
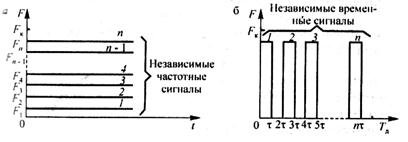
Рис. 18. Частотные и временные разделения сигналов
Если имеются ограничения на допустимое время передачи сигналов Tд, то минимальная полоса частот, необходимая для передачи сигнала такой длительности, определяется из соотношения Fc=1/Tд. Максимально возможное число частотных сигналов n =Fk /Fc.
Подобным образом могут быть организованы частотные каналы для независимой передачи непрерывных сигналов. Число таких каналов для аналоговых сигналов будет значительно меньше, чем для дискретных, так как каждый из них будет занимать большую полосу частот.
Временное разделение сигналов. Полностью использовать полосу частот канала связи можно также при передаче сигнальных импульсов длительностью τ=1/Fk . Такие импульсы должны передаваться последовательно во времени, так как каждый из них требует использования всей полосы частот (рис. 18,б). Для правильного приема импульсов между ними должны быть разделительные паузы. Длительность такой паузы не может быть меньше длительнос-
ти импульса. Отсюда за время может быть передано п независимых сигналов:
![]()
Кроме рассмотренных двух предельных случаев максимального использования объема канала при частотном и временном его разделении, может быть организована передача частотно-временных сигналов при условии, что их общий объем не превышает объема канала.
Любой реальный сигнал, передаваемый по каналу связи, изменяется во времени по амплитуде Aс(Hс) и частотным составляющим Рс, т.е. его объем
![]()
Проекции объема сигнала на плоскости позволяют судить об изменениях амплитуды (рис.19, а), частоты (рис. 19, б) во времени, амплитуды частотных составляющих (спектральной ха
характеристики) сигнала (рис. 19, в). Рассмотренные проекции, представляющие собой один и тот же сигнал, взаимосвязаны и поэтому по определенным правилам из одной проекции можно получить другую.
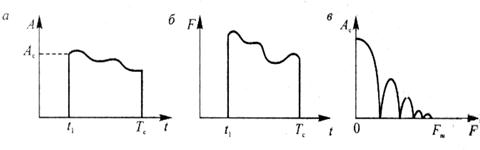
Рис. 19. Проекции объема сигнала на плоскости
Наиболее широко в теории сигналов используются взаимные преобразования двух проекций: получение спектральной характеристики из известной зависимости амплитуды сигнала во времени и получение закона изменения формы сигнала во времени из известной спектральной характеристики.
Правила выражения одной характеристики сигнала через другую получены на основе преобразований Фурье и называются соответственно прямым (3) и обратным (4) преобразованиями Фурье:
Сигналы, передаваемые по каналу, могут быть представлены как одиночными импульсами, так и последовательностями импульсов с постоянным и переменным периодами следования.
Последовательности импульсов имеют следующие параметры (рис. 20): амплитуду Ат, длительность (ширину) импульсов τи тактовую частоту следования F = 1/T (круговую частоту, )положение (фазу) импульсов относительно тактовых точек tі= iТ, где i = 0, ± 1,±2,...
![]()
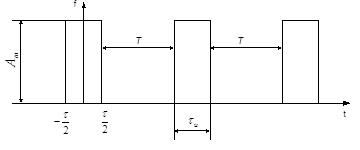
Рис.20. Характеристика последовательностей импульсов
![]() Отношение
периода следования импульсов к длительности называется скважностью
Отношение
периода следования импульсов к длительности называется скважностью
Эта величина также является характеристикой последовательности импульсов.
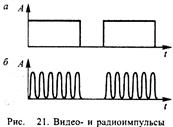
Если в канале связи передаются импульсы постоянного тока, их называют видеоимпульсами (рис. 21, а). Импульсы переменного тока принято называть радиоимпульсами (рис. 21, б).
Спектры сигналов, передаваемых одиночными импульсами или короткими сериями таких импульсов, существенно отличаются от спектров периодических сигналов.
Например, периодическая последовательность прямоугольных импульсов со скважностью, равной двум (рис. 22, a), достаточно хорошо описывается суммой первых трех гармоник, тогда как одиночный импульс (период бесконечен) для своего отражения требует непрерывного спектра гармонических колебаний.
Возрастание периода следования импульсов ведет к увеличению
спектра частот, необходимых для их описания (рис. 22, б). Таким образом,
любая последовательность импульсов может быть представлена суммой постоянной
составляющей с амплитудой Аo и гармоник, кратных частоте
повторения импульсов  т.е. кратных основной
гармонике (k = 1).
т.е. кратных основной
гармонике (k = 1).
Для правильного восприятия импульсов на приемной стороне канал связи должен обеспечивать неискаженную передачу соответствующего спектра частот. При заданном объеме канала для согласования преобразуют объем сигналов.
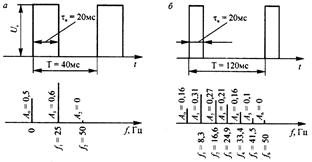
Рис. 22. Спектры частот последовательности импульсов со скважностью, равной двум (а) и шести (6)
© 2010 Интернет База Рефератов