
Рефераты по сексологии
Рефераты по информатике программированию
Рефераты по биологии
Рефераты по экономике
Рефераты по москвоведению
Рефераты по экологии
Краткое содержание произведений
Рефераты по физкультуре и спорту
Топики по английскому языку
Рефераты по математике
Рефераты по музыке
Остальные рефераты
Рефераты по авиации и космонавтике
Рефераты по административному праву
Рефераты по безопасности жизнедеятельности
Рефераты по арбитражному процессу
Рефераты по архитектуре
Рефераты по астрономии
Рефераты по банковскому делу
Рефераты по биржевому делу
Рефераты по ботанике и сельскому хозяйству
Рефераты по бухгалтерскому учету и аудиту
Рефераты по валютным отношениям
Рефераты по ветеринарии
Рефераты для военной кафедры
Рефераты по географии
Рефераты по геодезии
Рефераты по геологии
Рефераты по геополитике
Рефераты по государству и праву
Рефераты по гражданскому праву и процессу
Рефераты по делопроизводству
Рефераты по кредитованию
Рефераты по естествознанию
Рефераты по истории техники
Рефераты по журналистике
Рефераты по зоологии
Рефераты по инвестициям
Рефераты по информатике
Исторические личности
Рефераты по кибернетике
Рефераты по коммуникации и связи
Дипломная работа: Контроллер угловой информации
Дипломная работа: Контроллер угловой информации
Аннотация
В дипломном проекте «Контроллер угловой информации» подробно рассмотрены непосредственно относящиеся к теме диплома требования, предъявляемые к данной аппаратуре, выбрана структурная схема устройства. Исходя из требований к функциональным узлам, в среде САПР MAX+PLUS II был разработан проект, предполагающий использование в качестве основного элемента схемы - ПЛИС семейства FLEX фирмы ALTERA, содержащего в себе всю логическую часть разрабатываемого устройства, а также сделан выбор элементной базы. Так же в одном из разделов диплома разработана и описана принципиальная схема устройства. В пояснительной записке к дипломному проекту дано экономическое обоснование, выполнено сетевое планирование работ и разработаны мероприятия по безопасности жизнедеятельности.
Перечень сокращений
СБИС - сверхбольшие интегральные схемы,
ПЛИС - программируемые интегральные микросхемы,
САПР - система автоматизированного проектирования,
МАИ - малые азимутальные импульсы,
АС - аппаратура сопряжения,
АПД - аппаратура передачи данных,
АПОИ- аппаратура первичной обработки информации.
Введение
В настоящее время, в связи с быстрыми темпами развития цифровой техники, число функций, возлагаемых на современное радиолокационное оборудование, сильно увеличивается, системы становятся более надежными, появляются возможности самоконтроля, что значительно упрощает процесс их использования и позволяет в случае возникновения каких-либо отклонений от нормального режима работы немедленно оповестить обслуживающий персонал.
В связи с большим числом требований, предъявляемых к радиолокационной аппаратуре, ее разработка ведется разными КБ, результатом работы которых является отдельные устройства, выполняющие свои строго определенные функции. Кроме того, процесс изменения или добавления определенных узлов аппаратуры вызывает иногда необходимость доработки других, сопряженных с ними устройств.
Все вышесказанное вызывает необходимость к созданию определенных устройств,позволяющих сформировать по определенным входным воздействиям, сигналы, с которыми должны работать следующие узлы радиолокационной аппаратуры.
Темой данного дипломного проекта является разработка электрической принципиальной схемы и маркировочного чертежа устройства, предназначенного для сопряжении датчиков антенны обзорного радиолокатора, являющимися преобразователями ВАЛ-КОД, с двумя комплектами АС, АПД, АПОИ и функционирующего под воздействием различных сигналов управления.
1. Анализ ТЗ
Согласно техническому заданию, необходимо разработать устройство, связывающее датчики антенны с аппаратурой передачи данных, сопряжения и первичной обработки информации.
По ТЗ устройство должно функционировать под различными внешними и внутренними сигналами управления и формировать сигналы ТТЛ уровней специальной формы, целесообразно выполнить его с использованием цифровой техники. В качестве основного элемента, выполняющего все основные логические функции, можно выбрать микропроцессор или ПЛИС, либо выполнить схему на цифровых дискретных элементах.
Рассмотрим каждый из методов отдельно.
Микропроцессор имеет небольшое число портов ввода вывода, кроме того, создание для него программы, выполняющей заданные в ТЗ функции, является непростой задачей и написание ее на языке низкого уровня может вызвать огромные трудности.
При использовании дискретных цифровых элементов появляется множество других проблем. Это и сильное усложнение схемы, связанное с очень большим числом логических элементов, уменьшение ее надежности, увеличение габаритных размеров всего устройства в целом, что является недопустимым с точки зрения заданных в ТЗ требований на разрабатываемое устройство.
Оптимальным выбором для создания схем, выполняющих сложные функции, является использование ПЛИС. Это связано с рядом достоинств их перед различными другими СБИС. Современные ПЛИС обладают огромными возможностями: некоторые из них имеют внутреннюю емкость порядка 100000 вентелей или несколько тысяч логических элементов, кроме того большинство микросхем имеют возможность функционировать, используя пониженное напряжение питания - 2.5 В, причем количество входов и выходов некоторых ПЛИС достигает 1000.
Остановим свой выбор на ПЛИС фирмы ALTERA, так как эти микросхемы являются наиболее доступными и имеют небольшую стоимость, относительно ПЛИС других фирм. Кроме этого фирма ALTERA выпускает целый ряд различных по возможностям и стоимости микросхем, благодаря чему появляется возможность выбора микросхемы исходя из заданных требований. Помимо вышесказанного использование микросхем фирмы ALTERA позволяет создавать проект внутри микросхемы с помощью специальной САПР, характеризующейся простотой и большими функциональными возможностями.
2. Составление структурной схемы устройства
Анализа ТЗ показал большие возможности, открывающиеся при использовании ПЛИС, поэтому все основные логические функции устройства возложим именно на нее.
Согласно ТЗ, устройство должно работать с сигналами, идущими с двух оптических датчиков ЛИР-158А, являющимися преобразователями ВАЛ-КОД. Так как в ТО на оптические датчики сказано, что их выходными сигналами являются сигналы стандартных ТТЛ уровней, а большинство ПЛИС фирмы ALTERA работают именно с такими сигналами, то для их согласования не потребуется никаких дополнительных преобразователей уровня.
Наличие парафазных входных сигналов позволяет осуществлять работу от любого из них при пропадании другого, поэтому в качестве приемников парафазных сигналов, согласно рекомендации на оптические датчики будем использовать микросхемы AM26LS32 фирмы ANALOG DEVICES, осуществляющих преобразование парафазных сигналов в один прямой.
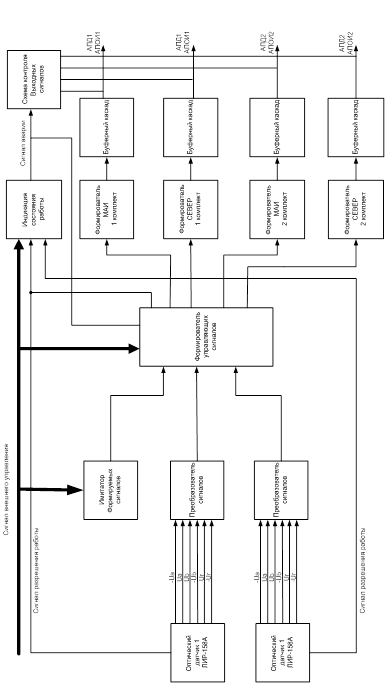
Так как выходной ток микросхемы является небольшим, передачу формируемых, согласно ТЗ, сигналов МАИ и СЕВЕР будем осуществлять через дополнительные буферные каскады усиления для обеспечения нормальной работы АС, АПД и АПОИ. Таким образом, учитывая все вышесказанные характеристики, составим обобщенную структурную схему устройства (смотри рисунок 1).
3. Составление функциональной схемы проекта внутри ПЛИС 3.1
3.1 Использование сигнала UВ
Так как находясь на открытой местности (во избежание сильного изменения диаграммы направленности), антенна обзорного радиолокатора подвержена значительным колебаниям ветра, которые в свою очередь оказывают отрицательное воздействие на работу устройства и могут вызвать ошибки в его работе, была применена простая схема, позволяющая избежать вышеуказанные недостатки. Схема представлена на рисунке 2.
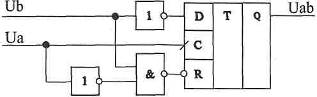
Рисунок 2 - Схема формирования сигнала U АB
Помимо сигналов UA, UR, с двух преобразователей ВАЛ – КОД (датчиков ЛИР-158А) на вход ПЛИС поступают сигналы UB, являющийся сдвинутым на четверть периода сигналом UА.
Как видно из рисунка 2, на тактируемый вход CLK D триггера подается сигнал UА, а сигнал не-UB - поступает на вход D, осуществляя игнорирование любого изменения сигнала UА, пока не закончится импульс UА. Таким образом, срабатывание триггера происходит по фронту сигнала UA, а сбрасывание – по одновременному появлению сигналов не-UА и UB на входе CLRN триггера смотри рисунок 3.
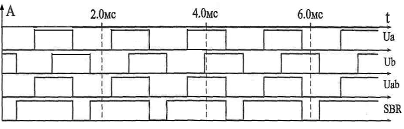
Рисунок 3 - Временные диаграммы формирования UAB
3.2 Выбор частоты синхронизации
Так как для реализации многих функций устройства (самоконтроль, формирователь импульсов, имитатор, формирователь управляющих сигналов питания датчиков) требуется тактирующий сигнал, выбор его частоты осуществим из следующих положений: Исходя из требований ТЗ, устройство должно формировать импульсы заданной длительности 40 ±8 мкс и имеющие определенное взаимное расположение смотри рисунок 4.
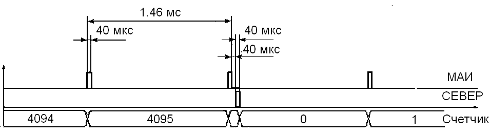
Рисунок 4 - Временные диаграммы формируемых импульсов
Обычно хорошей точностью считается превышение заданных характеристик хотя бы на порядок, выберем длительность импульсов синхронизации равной 1 мкс, таким образом, длительность сформированных сигналов составит 40 ±1 мкс. Так как входной синхросигнал имеет частоту 20 MHz, составим схему деления импульсов на 20, смотри рисунок 5.
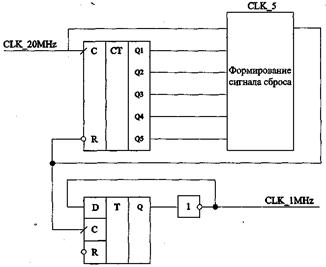
Рисунок 5 - Функциональная схема делителя частоты
На рисунке 5 представлена схема деления частоты на 20. Входной сигнал частотой 20 MHz поступает на синхронизирующий вход пяти разрядного счетчика. Блок CLK 5 осуществляет формирование строба через каждые 10 импульсов синхронизации с длительностью равной 50 нc (20 MHz) Выходные стробирующие импульсы поступают на синхронизирующий вход триггера, результатом работы которого является меандр частотой 1 MHz, смотри рисунок 6.

Рисунок 6 - Временные диаграммы формирователя частоты синхронизации
3.3 Контроль входных сигналов
Алгоритм контроля входных сигналов построен следующим образом: устройство должно осуществлять проверку входящих сигналов на основе данных об расположении импульсов UАВ и UR, положение которых в нормальном состоянии должно соответствовать рисунке 7.
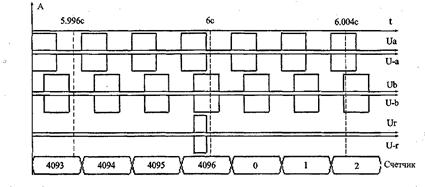
Рисунок 7 - Временные диаграммы расположения входных сигналов
Так как сигнал UR несет в себе информацию о направлении антенны обзорного локатора на СЕВЕР, то его пропадание может вызвать нарушения в работе локатора, таким образом, необходимо осуществлять контроль данного сигнала, и, при возникновении неисправности, сигнализировать обслуживающий персонал о его исчезновении и осуществлять автоматическое переключение на другой оптический датчик, использующийся для резерва.
Согласно ТО на обзорный радиолокатор, скорость вращения антенны является величиной не постоянной и зависит от большого числа факторов таких как: скорость ветра, температура окружающей среды и т.д. Кроме того, при включении привода локатора выход антенной системы в рабочий режим происходит не мгновенно. Все эти факторы влияют на то, что период следования сигнала UR постоянно меняется. Согласно ТО, нормальным режимом работы локатора считается режим, при котором скорость вращения антенны составляет 1 оборот за 6 с.
Сигнал UА несет в себе азимутальную информацию и состоит из набора 4096 импульсов характеризующих изменение угла на 8 минут, поэтому по пришествию импульса UR, необходимо осуществлять их подсчет и сформировать сигнал аварии при несоответствии их числа 4096-ти, а также осуществить переключении на работу от второго оптического датчика, при необходимости.
Так как контролировать сигналы нужно по разным параметрам, целесообразно разделить функцию контроля входных сигналов на два отдельных модуля:
- Модуль SEVER _ 1,
- Модуль MAI _1.
- Модуль SEVER_1
- Структурная схема модуля SEVER_1представлена на рисунке 8.
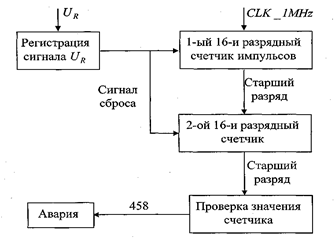
Рисунок 8 - Структурная схема модуля SEVER_1
Модуль SEVER _1 организуем таким образом: Так как скорость вращения антенны локатора не статична будем осуществлять ожидание появления сигнала UR в течение 30 с, что эквивалентно 5-и оборотам антенны при номинальном темпе обзора, составляющем 1 оборот за 6 с. По истечении этого срока будем формировать сигнал УХУДШЕНИЕ, а также сигналы управления датчиками (выключение первого оптического датчика, включение второго оптического датчика). При возникновении невозможности резервирования (вышли из строя 2-а датчика) будем формировать сигнал АВАРИЯ.
Модуль SEVER _1 представляет собой написанную на языке AHDL программу [1]. Заголовок модуля содержит объявленное заранее значение константы Т _ ZAD, несущее в себе информацию о значении до которого досчитал второй счетчик, и необходимое для быстрого изменения условий работы алгоритма.
Формирование необходимой паузы в 30 с организуем с помощью двух 16-и разрядных счетчиков COUNT _ 1 _ 1 и COUNT _ 2_ 1 на синхронизирующие входы которых подадим синхроимпульсы частотой 1 МГц для первого и старший разряд первого счетчика - для второго соответственно. Таким образом, для формирование необходимой паузы, второй счетчик должен досчитать до числа 458, при возникновении которого с помощью D триггера D2 _1 формируется строб STROB _SEVER _ 1, по которому осуществляется формирование сигнала VCC _ DATCHIK _ 1, управляющего работой оптического датчика смотри рисунок 9 (Здесь, для наглядности, показан один счетчик, и частота синхронизации увеличена в 100 раз). При появлении сигнала UR, счетчики сбрасываются, и цикл ожидания повторяется заново смотри рисунок 10. Помимо вышесказанного, сигнал управления питанием датчика - VCC _DATCHIK _1 формируется не в любое время (по возникновению STROB _ SEVER _1), а во избежания формирования искаженного импульса, только после окончания действия сигналов UAB и UR, благодаря JK триггеру D1_1, сброс которого осуществляется сигналом управления WORK смотри рисунок 11. Кроме того, функционирование модуля SEVER _1 осуществляется под воздействием внешних сигналов управления:
- WORK-Работа,
- USTIROVKA -Юстировка,
- MU - Местное управление.
При включении режима WORK осуществляется нормальная работа схемы и контроль входных сигналов. В режиме USTIROVKA или MU - контроль сигналов не функционирует и режим формирования сигналов УХУДШЕНИЕ и АВАРИЯ не происходит. Помимо этого в режиме USTIROVKA схема автоматически устанавливает сигнал VCC _DATCHIK 1 в положение, соответствующее работе первого оптического датчика.
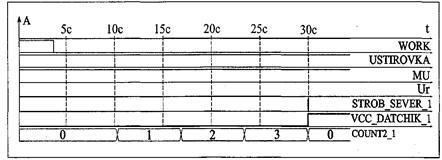
Рисунок 9 - Временные диаграммы формирования сигнала, управляющего питанием первого датчика
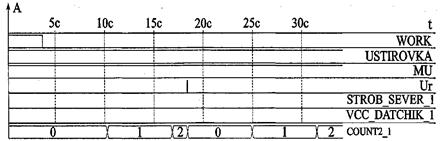
Рисунок 10 - Временные диаграммы сброса счетчиков сигналом UR
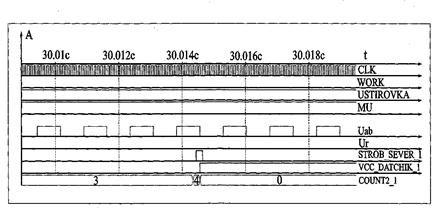
Рисунок 11 - Временные диаграммы формирования сигнала VCC _ DA TCHIK _ 1 по сигналу STROB _ SEVER _1 и UAB
Контроль расположения импульсов UА осуществим иначе:
В паспорте на оптический датчик (ЛИР-158А) сказано о возможности изменения числа импульсов 4096 в переделах ±15 импульсов, то по возникновению данной ситуации будем формировать строб отклонения числа импульсов от заданного. При сильных изменениях в числе импульсов UАв будем формировать сигнал АВАРИЯ, и устанавливать сигнал VCC DATCHIK 1, управляющий работой первого датчика, в положение выключено.
Модуль MAI__1
Структурная схема работы модуля MAI _ 1 представлена на рисунке 12.

Рисунок 12 - Структурная схема работы модуля MAI _ 1
Модуль MAI _1 представляет собой программу, написанную на языке
AHDL [1] и предназначенную для работы с сигналами, идущими с первого оптического датчика. В заголовке программы добавим обозначения констант.
NUM _ MAI _ МАХ (максимально допустимое число импульсов UАВ),
NUM _ MAI _ NORM (Нормальное число импульсов UАВ),
NUM _ MAI _ MIN (минимально допустимое число импульсов UАВ).
Изменение данных величин, по необходимости, позволяет быстро осуществить изменение условий работы модуля MAI _1. В качестве основных элементов программы являются два счетчика импульсов:
COUNT 1 _1 - 16-и разрядный счетчик импульсов UАВ.
COUNT 2 1 - 4-ех разрядный счетчик стробирующих импульсов
NE_NORMA_l.
Так как схема управляется внешними сигналами, и неожиданное переключение может вызвать незапланированное неправильное формирование сигнала ошибки, проверка числа импульсов UАВ осуществляется во время прихода второго импульса UR, в результате чего происходит формирование строба NORMA _ 1, если число импульсов соответствует 4096-и, NE _ NORMA _ 1, если число импульсов U АВ лежит в допустимых пределах и NE_V_ DOPUSKE_1, если их число выходит за значения, указанные в разделе констант, смотри рисунок 13. При работе схемы под воздействием управляющих сигналов ЮСТИРОВКА, MU_D1 или MU_D2, последние два действительны только при наличии дополнительного сигнала, включающего режим местного управления, схема контроля входных сигналов модуля MAI _1 прекращает свою работу и устройство не реагирует на возникновение каких-либо нарушений в работе оптических датчиков.
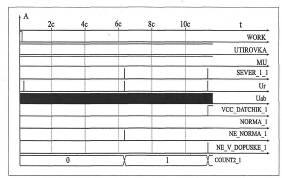
Рисунок 13 - Временные диаграммы работы модуля MAI _1
Как видно из рисунка 13, счетчик считает стробирующие импульсы NE_NORMA_1, появление же импульса NE_V _DOPUSKE_1 вызывает немедленное формирование сигнала VCC_DATCHIK _1. При возникновении импульса NORMA _ 1 происходит сброс счетчика, и работа схемы продолжается смотри рисунок 14. (Здесь, для наглядности восприятия, показана работа только второго счетчика)
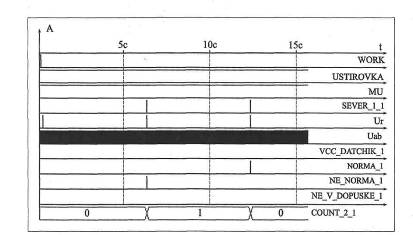
Рисунок 14 - Временные диаграммы сброса счетчика по сигналу NORMA_1
При появлении подряд трех стробирующих импульсов NE_NORMA _1 происходит формирование сигнала VCC _DATCHIK_ 1 и переключение на работу от второго оптического датчика.
3.4 Блок PR_SEVER_1
Работа модуля MAI _1 была бы невозможна без специально написанного дополнительного блока PR_SEVER_1, осуществляющего пропуск первого импульса UR, по переключению схемы из одного режима работы в другой смотри рисунок 15.

Рисунок 15 - Временные диаграммы работы блока PR_SEVER_1
Как видно из рисунка 15, сигналы переключения режимов WORK-USTIROVKA приводят к сбросу формирователя последовательности SEVER_1_1, организованного на триггерах d1 _1 и d2 _1. На синхронизирующие входы, которых поданы сигналы U R, и не-U R соответственно. Сброс триггеров осуществляется подачей на их входы CLRN сигналов управления - WORK и USTIROVKA.
При работе схемы в режиме не-WORK последовательность импульсов SEVER _1 _1 полностью совпадает с последовательностью UR
Сигнал MU_ON предназначен для передачи информации о необходимости работы первого датчика в блок MAI _1 и SEVER _1. Как видно из рисунка 15, во время включения режима USTIROVKA, сопровождающегося выключением режима WORK, сигнал разрешение работы первого датчика не отключается, что связано с необходимостью работы в этом режиме обоих датчиков. Сигналы IMP_MAI__1 и IMP SEVER _1 сформированы под воздействием внешних управляющих сигналов, указанных выше и являются копиями последовательностей сигналов UАВ и UR.
3.5 Блок DATCHIK_1
Структурная схема блока DATCHIK _1 представлена на рисунке 16.
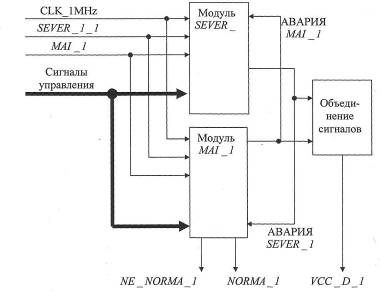
Рисунок 16 - Структурная схема работы блока DATCHIK _1
Данный блок предназначен для работы с модулями MAI _ 1 и SEVER _ 1 и осуществляет передачу управляющих сигналов из одного модуля в другой, создавая, таким образом, возможность выключения модуля при появлении в другом - внутреннего сигнала аварии. Режим передачи внутренних сигналов состояния осуществляется при помощи сигналов VCC _ SEVER_1 и VCC_МAI _1 для модулей MAI и SEVER соответственно. Результатом работы блока DATCHIK_1 являются сформированные сигналы VCC__D_1, NORMA _1 и NE _ NORMA __ 1, назначение которых приведено ниже:
-VCC_D_1 несет в себе информацию о результате работы модулей MAI_ 1 и SEVER _ 1. (Сигнал с активным низким уровнем).
-NORMA _1 - строб импульс, показывающий, что при повороте антенны локатора на 360°, число импульсов UАв первого оптического датчика соответствует 4096-ти.
-NE _NORMA _1 - строб импульс, показывающий, что при повороте антенны локатора на 360°, число импульсов UАВ первого оптического датчика отклонилось от номинального значения на допустимую величину.
3.6 Функции управления резервным оптическим датчиком
Организация работы второго оптического датчика построим по аналогичной с первым датчиком схеме. Контроль входных сигналов UАВ и UR, идущих с резервного оптического датчика, возложим на модули MAI _2,
SEVER _ 2 и блок управления DATCHIK _2. Режим работы блока
PR _ SEVER 2 создадим отличным от PR _ SEVER _1, так как второй датчик в режиме WORK, при нормальном функционировании первого, должен быть отключен. Для этого, помимо вышеуказанных сигналов, характерных PR SEVER 1, введем дополнительный входной сигнал VCC __DATCHIK _1, идущий с блока DATCHIK_1 и осуществляющий разрешение формирование последовательностей IMP _МА1 _2 и IMP _ SEVER _ 2 по импульсам идущим со второго оптического датчика.
Таким образом, при одновременной работе PR _SEVER _1, DATCHIK _1 и PR SEVER_2, DATCHIK _2 в режиме WORK осуществляется работа с первым датчиком, а при возникновении неисправности (формирование сигналов АВАРИЯ модулями MAI _1 или SEVER _1), происходит автоматическое
переключение на работу и прием сигналов от резервного датчика. При возникновении ошибок в работе второго датчика (формирование сигналов АВАРИЯ модулями MAI_2 или SEVER 2) происходит формирование общего сигнала АВАРИЯ и работа схемы останавливается.
При переключении режима работы схемы с WORK на USTIROVKA или на MU вышеуказанными модулями происходит автоматическая установка внутренних сигналов управления оптическими датчиками в положение, соответствующее включенному состоянию и осуществляется выключение схем контроля за параметрами принимаемых импульсов.
Структурная схема совместной работы блоков DATCHIK _ 1 и
DATCHIK_2 приведена на рисунке 17. Как видно из рисунка 17, в режиме WORK, сигнал управления включением питания второго оптического датчика является обратным по отношению к сигналу, осуществляющему управление питанием первого оптического датчика. Таким образом, работа второго оптического датчика запрещена до момента возникновения аварии в первом.
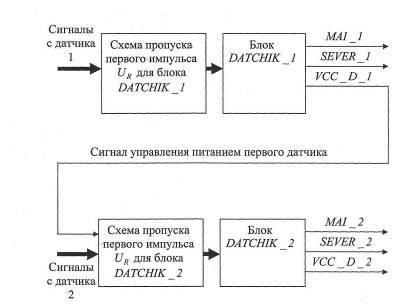
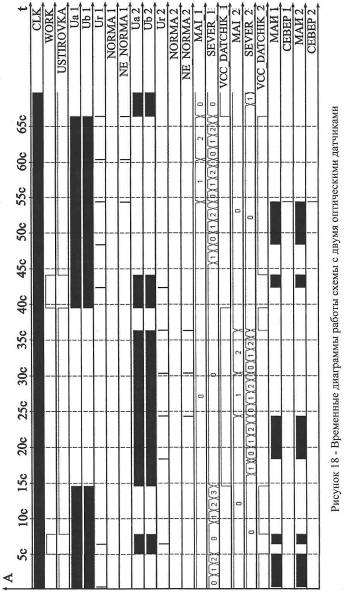
Рисунок 17 - Структурная схема совместной работы блоков DATCHIK_1 и DATCHIK_2
Временные диаграммы работы вышеуказанных блоков вместе приведены на рисунке 18, где MAI _1, SEVER _1 иллюстрируют работу счетчиков схем контроля импульсов первого датчика, a MAI_2, SEVER_2 - для второго. (Для наглядности частота синхронизации увеличена в двадцать пять раз).
3.7 Блок формирователей сигналов МАИ и СЕВЕР
К одним из требований, предъявляемых к разрабатываемому устройству, является формирование сигналов специальной формы и имеющих определенную временную расстановку смотри рисунок 3. В перечисленных выше режимах, кроме режима ИМИТИТОР, сигналы МАИ и СЕВЕР должны формироваться только по фронту приходящих с оптических датчиков импульсов U Ав и UR, причем, как видно из рисунков 3 и 6, сигнал СЕВЕР должен формироваться до прихода импульса UR, создавая, таким образом, ситуацию, при которой создание первого импульса СЕВЕР оказывается невозможным, в связи с неизвестностью априорных данных о количестве импульсов U Ав.
Поэтому при разработке блока формирователя сигналов было сделано следующее. При переключении режима работы и появлении сигнала включения питания датчика 1, процесс формирования импульсов начинается не сразу, а по прошествии первого импульса UR. Причем, при возникновении неисправности оптического датчика и появлении сигнала UR позже 4096-ти импульсов UAB, сигнал СЕВЕР будем формировать точно на 4096-ом импульсе, так как этого требуют другие устройства, входящие в аппаратуру локатора. Кроме этого, при возникновении ситуации, когда импульс UR появляется раньше требуемого, процесс формирования СЕВЕРА прерывается до появления следующего сигнала UR. Структурная схема формирователя представлена на рисунке 19, временные диаграммы работы блока с числом импульсов UАВ > 4096 и с UАВ < 4096 приведены на рисунках 20 и 21 соответственно.
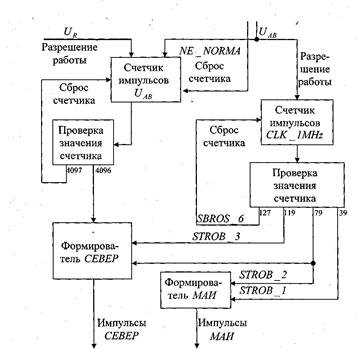
Рисунок 19 - Структурная схема работы формирователя импульсов МАИ и СЕВЕР
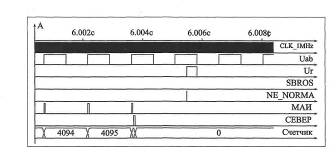
Рисунок 20 - Временные диаграммы работы блока формирователя, где число UАВ > 4096
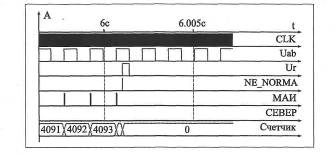
Рисунок 21 - Временные диаграммы работы блока формирователя, где число UАв < 4096
3.8 Блок IMITATOR
Для
формирования сигналов специальной формы (смотри рисунок 4), с параметрами, не
зависящими от входных импульсов UАВ и UR, в
графическом редакторе системы MAX+plus [2] был разработан блок IMITATOR, позволяющий
по импульсам синхронизации осуществить создание вышеуказанных сигналов с высокой
точностью. Формирование длительности и временного расположения импульсов МАИ и
СЕВЕР аналогичны разработанному выше блоку формирователя сигналов. Так как
поворот антенны осуществляется за 6с, а число импульсов, идущих с оптических
датчиков, равно 4096-и, необходимый период следования равен: ТМАИ
=![]() =1.46 мс (смотри
рисунок 4). За его создание отвечает дополнительный 11-и разрядный счетчик
синхроимпульсов частотой 1 МГц, идущих из блока формирования тактового
синхросигнала (смотри рисунки 5 и 6)
=1.46 мс (смотри
рисунок 4). За его создание отвечает дополнительный 11-и разрядный счетчик
синхроимпульсов частотой 1 МГц, идущих из блока формирования тактового
синхросигнала (смотри рисунки 5 и 6)
Функциональная схема блока имитатора представлена на рисунке 22. Блоки SBROS 11_i, SBROS _13_i создают сигналы сброса SBROS _11 и SBROS 13 для счетчиков, формирующих период следования импульсов МАИ и принимающих участие в формировании сигнала СЕВЕР. Длительность же вышеуказанных импульсов контролируется с помощью блоков SBROS_7_i_1, SBROS 7_i_2, SBROS 7_ i_3, представляющих собой, написанную на языке AHDL программу [1], реализующую создание стробов, защелкивающих 3-и JK триггера для последующего создания необходимой длительности.
Функционирование блока происходит под воздействием внешнего сигнала управления (разрешения работы), называемого ENA смотри рисунок 22. Так как переключения режимов работы устройства могут вызвать искажения формы создаваемых блоком имитатора сигналов FORM _MAI, FORM _ SEVER, действие сигнала ENA осуществляется только при одновременном отсутствии вышеуказанных сигналов, что обеспечивается при помощи дополнительного JK триггера, формирующего импульс управления Z.
3.9 Режимы работы устройства
Согласно ТЗ на разрабатываемое устройство, помимо режима WORK, когда работа схемы осуществляется с первым датчиком, а второй включается только при возникновении сигнала АВАРИИ, необходимо реализовать еще 2-а режима работы:
- Режим ЮСТИРОВКА,
- Режим ИМИТАТОР.
Режим ЮСТИРОВКА должен приводится в действие внешними органами управления, и обеспечивать одновременное включение питания обоих оптических датчиков с передачей формируемых сигналов МАИ1, СЕВЕР 1, МАИ 2 и СЕВЕР 2 на соответствующие комплекты аппаратуры сопряжения, передачи данных и первичной обработки информации. Внешний сигнал управления ЮСТИРОВКА предназначен для настройки и калибровки оптических датчиков антенны, так как параметры формируемых ими сигналов должны иметь как можно меньше расхождений, при возникновении которых в работе схемы разрабатываемого устройства и другой аппаратуры могут возникнуть значительные ошибки, наличие которых недопустимо.
Режим ИМИТАТОР должен приводиться в действие с помощью внешних сигналов управления ИМИТАТОР 1-й КОМПЛЕКТ и ИМИТАТОР 2-й КОМПЛЕКТ, действие на схему которых отличается друг от друга следующими результатами:
При включении режима ИМИТАТОР 1-й КОМПЛЕКТ и одновременном наличии на входе устройства управляющего сигнала РАБОТА ПРИВОДА 1 антенны локатора на соответствующий комплект аппаратуры сопряжения передачи данных и первичной обработки информации должны передаваться импульсы, сформированные от встроенного в схему устройства имитатора, а на другой комплект - от выбранного в работу, согласно режиму WORK, оптического датчика.
При включении режима ИМИТАТОР 2-й КОМПЛЕКТ и одновременном наличии на входе устройства управляющего сигнала РАБОТА ПРИВОДА 2 антенны локатора на соответствующий комплект аппаратуры сопряжения передачи данных и первичной обработки информации должны передаваться импульсы, сформированные от встроенного в схему устройства имитатора, а на другой комплект - от выбранного в работу, согласно режиму WORK, оптического датчика.
При включении режимов ИМИТАТОР 1-й КОМПЛЕКТ и ИМИТАТОР 2-й КОМПЛЕКТ одновременно или при совместном наличии управляющих сигналов аварий РАБОТА ПРИВОДА 1 и РАБОТА ПРИВОДА 2, на первый и второй комплекты аппаратуры сопряжения, передачи данных и первичной обработки информации должны передаваться импульсы, сформированные от встроенного имитатора.
Режим включения имитатора позволяет проверить работу различных узлов аппаратуры радиолокатора без включения привода антенны, что может стать очень важным при поиске возникших неисправностей в соединительных блоках аппаратуры во время ее установки, или в режиме эксплуатации.
Так как пульт управления радиолокатором находится, как внутри него, так и в контрольно диспетчерском пункте, то для удобства проверки устройства и используемых им оптических датчиков мною к вышеперечисленным внешним сигналам управления были добавлен еще 4-е сигнала. Эти сигналы позволяют обслуживающему персоналу проверить, по необходимости, разработанное мною устройство и вышеуказанные датчики без применения какой - либо дополнительной аппаратуры.
Сигнал MU - местное управление. Является главным сигналом управления и позволяет включить режим проверки схемы и датчиков. Включение данного режима без использования нижеуказанных сигналов игнорируется и происходит нормальная работа схемы в выбранном режиме.
Сигнал управления MU_D1 вместе с включением режима MU позволяет включить в работу первый оптический датчик, игнорируя наличие каких - либо неисправности в его работе.
Сигнал управления MU D2 вместе с включением режима MXJ позволяет включить в работу второй оптический датчик, игнорируя наличие каких - либо неисправности в его работе.
Сигнал управления MU _ IM вместе с включением режима MU позволяет включить имитатор.
Таким образом, добавленный режим работы позволяет еще более точно находить место возникшей неисправности и исправлять ее, используя вышеуказанные 3-й сигнала управления.
Для нормальной работы всей схемы с вышеуказанными сигналами, мною были дополнительно разработаны два блока управления М __ PITANIE и SIGNALS.
З.10 Блок M_PITANIE
Блок М _ PITANIE представляет собой, написанную на языке описания цифровых схем [1], программу, осуществляющую формирование сигналов включения и выключения питания двух оптических датчиков под воздействием внешних и внутренних сигналов управления. Программа организована из многочисленных проверок тех или иных условий, возникающих во время функционирования схемы устройства, и содержит иерархическую структуру. Алгоритм работы блока М _ PITANIE показан на рисунке 23 и 24. Кроме формирования вышеуказанных сигналов управления, в работу данного объекта входит передача сигналов UАВ и UR для первого и второго датчика на блоки формирователей, путем совмещения их операцией И со сформированными сигналами. Временные диаграммы работы блока М _ PITANIE показаны на рисунках 25 и 26, на которых изображена работа схемы в различных режимах (все сигналы управления, кроме МУ, имеют активный низкий уровень).
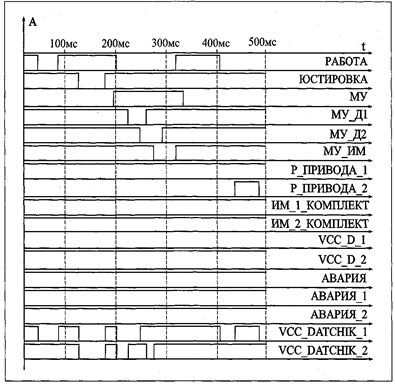
Рисунок 25 - Временные диаграммы работы модуля М _ PITANIE
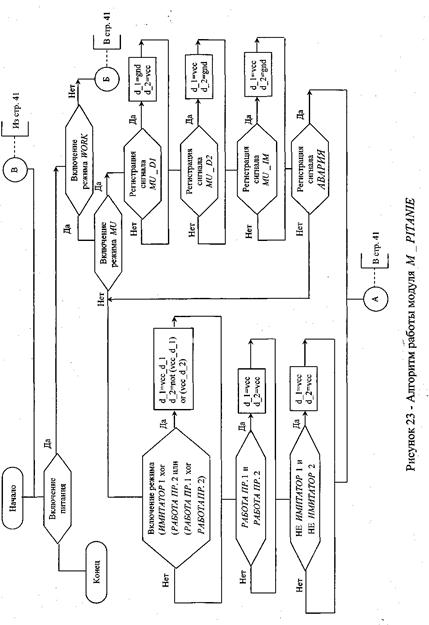
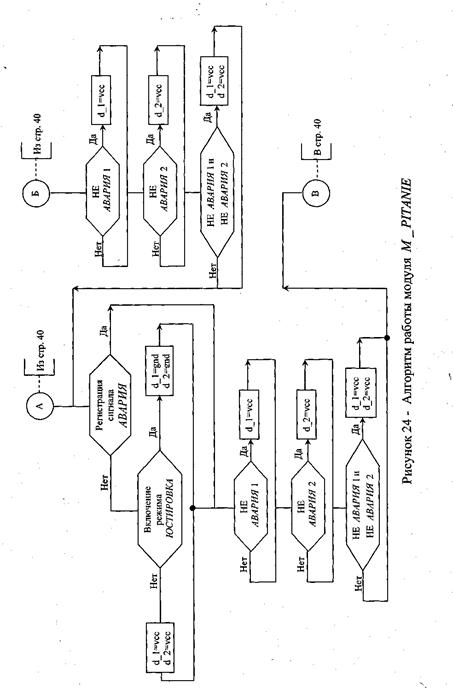
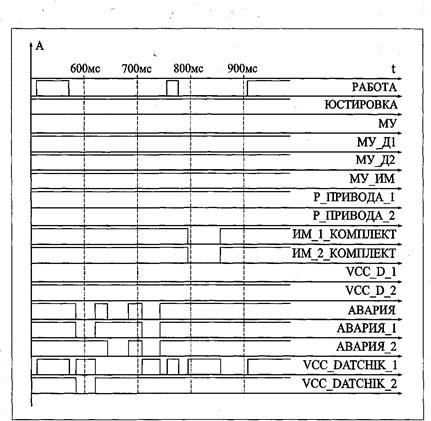
Рисунок 26 - Временные диаграммы работы модуля М_PITANIE
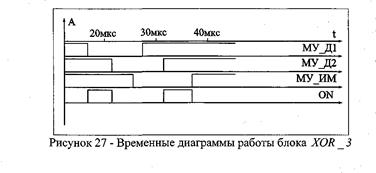
Как видно из рисунка 25, формирование сигналов VCC_DATCHIK_1 и VCC DATCHIK_2, при функционировании схемы в режиме МУ, во время совместного действия любых 2-х управляющих сигналов МУ _ Д1, МУ _ Д2 или МУ_ИМ, происходит согласно требованиям к режиму РАБОТА, так как устройство выходит из режима местного управления. Это связано с тем, что выполнение вышеуказанного условия, и создания данного режима работы потребовало бы наличия дополнительных сигналов управления, что повлекло бы к возникновению дополнительных трудностей при работе с устройством, что является недопустимым. Поэтому для исключения этой возможности была создана небольшая программа, выполняющая функции обычного элемента XOR (исключающее ИЛИ), и формирующая сигнал разрешения включения режима МУ, работа которой демонстрируется на рисунке 27, где ON- сигнал разрешения, с активным высоким уровнем.
3.11 Блок самоконтроля SAMOCONTROL _1
Формируемые,
в результате работы устройства сопряжения, сигналы МАИ и СЕВЕР, несут
в себе важную информацию об угловом положении антенной системы локатора, поэтому
любые изменения их параметров ![]() (временного расположения,
длительности, периода следования), могут привести к ошибкам в работе всей
системы. Поэтому для более надежной работы схемы, а также предотвращения
возникновения аварийной ситуации, дополнительно была создана схема,
осуществляющая контроль основных параметров формируемых импульсов, структурная
схема, которой представлены на рисунке 28.
(временного расположения,
длительности, периода следования), могут привести к ошибкам в работе всей
системы. Поэтому для более надежной работы схемы, а также предотвращения
возникновения аварийной ситуации, дополнительно была создана схема,
осуществляющая контроль основных параметров формируемых импульсов, структурная
схема, которой представлены на рисунке 28.
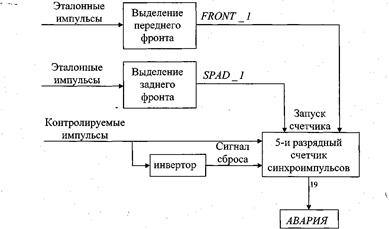
Рисунок 28 - Структурная схема работы блока самоконтроля
Временные диаграммы работы блока SAMOCONTROL 1 представлены на рисунках 29 и 30.
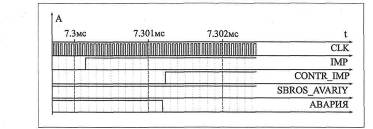
Рисунок 29 Временные диаграммы работы блока SAMOCONTROL 1
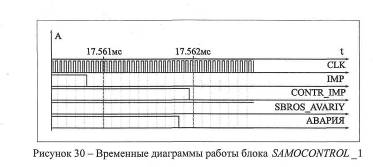
Импульсы IMP являются эталонными и, результатом регистрации их переднего и заднего фронтов, является запуск счетчика синхроимпульсов, формирующего строб аварии, досчитав до определенного числа (Число устанавливается в разделе констант программы блока значением NUM _1МР = 19). Появление импульса CONTR _1МР во время работы счетчика вызывает его сброс, и работа схемы начинается заново, осуществляя нормальный режим работы устройства.
Таким образом, блок SAMOCONTROL _1 проверяет задержку, возникающую между эталонными импульсами МАИ и СЕВЕР, и импульсами, прошедшими каскады усилителей мощности, необходимые для передачи сигналов в блоки АС, АПД и АПОИ и формирует сигнал АВАРИЯ, при ее не соблюдении. Так как, согласно ТЗ, необходимо формировать 2-а вида импульсов для двух комплектов АС, АПД, АПОИ, то общее число отправляемых импульсов МАИ и СЕВЕР равно 12, поэтому общее число блоков, осуществляющих самоконтроль формируемых сигналов также равно 12. Блоки SAMOCONTROL_1...12 являются независимыми друг от друга и работают каждый со своими сигналами.
Для уменьшения размеров общей функциональной схемы устройства, и улучшения ее восприятия, вышеуказанные блоки самоконтроля объединены в один блок SAMOCONTROL, осуществляющий формирование общего сигнала АВАРИЯ и сигналов состояния устройства, идущих на систему индикации.
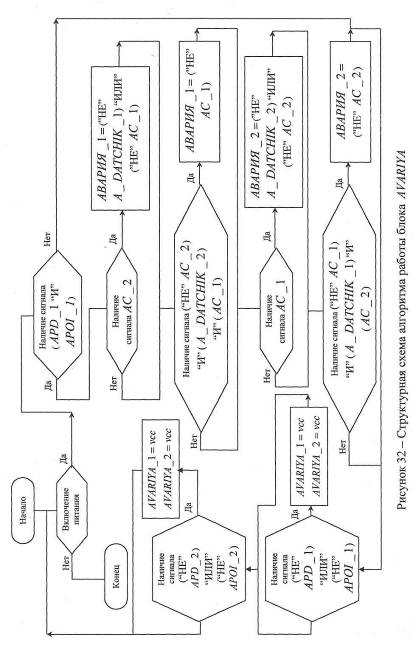
3.12 Блок AVARIYA
Согласно ТЗ на разрабатываемое устройство, кроме формирования вышеуказанных сигналов, схемой устройства должны формироваться специальные сигналы АВАРИЯ 1 и АВАРИЯ 2, необходимые для информирования других устройств о возникновении неисправности. За создание этих сигналов отвечает добавленный в общий проект блок - AVARIYA, временные диаграммы и алгоритм работы которого показаны на рисунках 31 и 32 соответственно.
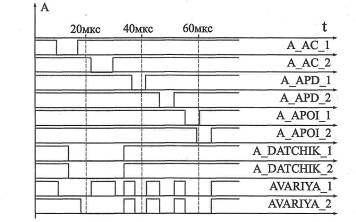
Рисунок 31 - Временные диаграммы работы блока AVARIYA
Как видно из рисунка 31 формирование сигналов AVARIYA_1 и AVARIYA_2 с активными низкими уровнями происходит при возникновении неисправности на выходе соответствующего буферного каскада, добавляя тем самым возможность контроля вышеуказанных и предотвращения режима неправильной работы устройства.
3.13 Блок SIGNALS
Создание и добавление этого блока в общую функциональную схему устройства было продиктовано тем, что, работая под воздействием различных внешних и внутренних сигналов управления, схема, сформировав сигналы МАИ и СЕВЕР, должна обеспечить их передачу на определенные комплекты АС, АПД и АПОИ, поэтому устройство сопряжения осуществляет переключение сформированных импульсов и направляет их на разную выходную аппаратуру.
В связи с наличием большого количества сигналов управления данный блок представляет собой, написанную на языке описания цифровых схем, программу, и имеет в качестве входных переменных - сигналы управления и сформированные разными блоками устройства под их воздействием импульсы МАИ и СЕВЕР, а выходных - сигналы, идущие непосредственно в соответствующие комплекты АС, АПД и АПОИ. Блок SIGNALS осуществляет следующие функции:
При включении режима WORK на 1 и 2 комплект АС, АПД и АПОИ передаются импульсы являющиеся результатом операции логическое ИЛИ между сформированными 1-ми 2-м формирователями сигналов МАИ и СЕВЕР, обеспечивая, таким образом, передачу сформированных сигналов даже в случае возникновения неисправности первого оптического датчика.
При включении режима USTIROVKA, являющегося режимом настройки оптических датчиков, на 1-ый комплект АС, АПД и АПОИ блоком SIGNALS посылаются импульсы, формирующиеся блоком первого формирователя, а на 2-ой комплект - импульсы, идущие с блока 2-го формирователя, обеспечивая тем самым работу с двумя датчиками одновременно.
При включении режима IMITATOR, блок SIGNALS на оба комплекта АС, АПД и АПОИ посылает импульсы, формирующиеся блоком встроенного имитатора, а при появлении одного из сигналов управления IM _ 1 _ COMPLECT или IM_2_COMPLECT на соответствующий комплект АС, АПД и АПОИ осуществляет передачу импульсов от имитатора, а на другой - импульсов МАИ и СЕВЕР, создающихся первым или вторым формирователями после выполнения над ними логической операции ИЛИ.
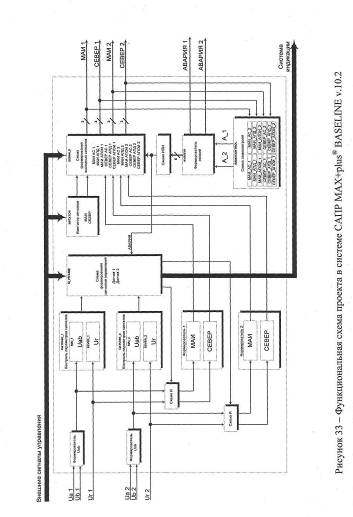
Работа в режиме 10 - местного управления характеризуется тем, что, при наличии дополнительных сигналов МУ _Д1, МУ_Д2 или МУ _ИМ на все комплекты АС, АПД, АПОИ блок SIGNALS передает импульсы, сформированные в результате работы блоков IMITATOR, F_1 или F_2 под воздействием вышеуказанных сигналов, объединенных с помощью блока XOR_3. Общая функциональная схема проекта в системе САПР MAX+plus® BASELINE v. 10.2. представлена на рисунке 33.
4. Выбор ПЛИС и ПЗУ
Выбор микросхемы ПЛИС, в которую предполагается загрузить весь составленный проект, осуществим следующим образом:
При постепенном добавлении разработанных блоков в общий проект происходит увеличение функциональной схемы устройства, при этом увеличивается как число используемых входов и выходов, так и используемые внутренние ресурсы самой микросхемы. Все это приводит к постепенному переходу от самых простых программируемых микросхем к более сложным. Процесс выбора микросхемы помогает осуществить компилятор САПР МАХ + plus [2], проверяющий израсходованные ресурсы микросхемы.
С помощью компилятора системы остановим свой выбор на микросхемах серии FLEX. Конкретную модель выберем исходя из следующих соображений:
Так как число используемых пользователем входов-выходов микросхемы строго заданы фирмой производителем, выберем микросхему с числом входов-выходов максимально близким к требующимся разработанным проектом.
Так как напряжение оптических датчиков антенны, согласно ТО, равно 5 В выберем микросхему с напряжением питания равным 5 В. Так как максимальная частота - частота синхронизации равна 20 МГц, остановим свой выбор на микросхеме FLEX10К20ТС144 - 3.
Согласно требованиям на микросхемы FLEX 10K20TC144 - 3, в качестве ПЗУ фирма ALTERA рекомендует использовать два вида микросхем: ЕРС1 и ЕРС 2. Достоинством микросхем ЕРС1 является низкая стоимость, но данные микросхемы не позволяют в случае необходимости осуществлять перепрограммирование с помощью компьютера. Более эффективными ПЗУ являются микросхемы ЕРС2, позволяющие осуществить изменение проекта внутри ПЛИС, подключая специальный кабель BYTEBLUSTER к заранее предусмотренному разъему, находящемуся на разработанной плате. Останов* свой выбор на микросхеме ЕРС2.
5. Выбор системы индикации
Согласно ТЗ, устройство должно иметь систему индикации. В качестве основных параметров, подвергающихся визуальному контролю, целесообразно будет выбрать сигналы, приведенные в таблице 1. В качестве элементов световой индикации выберем светодиоды фирмы KingBright, имеющей большое разнообразие светодиодов различающихся между собой цветом, яркостью направленностью свечения и размерами. Сигналы не требующих каких-либо действий со стороны пользователя, и обеспечивающие нормальную работу устройства выберем зеленым цветом, а сигналы приводящие к возникновению аварии или необходимые для немедленного обращения внимания, выберем красными. Так как одним из необходимых для индицирования сигналов является сигнал UHUDSHENIE, целесообразно будет выбрать его желтым цветом Выберем следующие светодиоды:
L1464 SGD - зеленый цвет,
L1464 SR D - красный цвет,
L1464SY D -желтый цвет.
Таблица 1 - Индицируемые сигналы состояния
| Название сигнала | Цвет |
| ВЫХ АСХ НОРМА | ЗЕЛЕНЫЙ |
| ВЫХ АПОИХ НОРМА | ЗЕЛЕНЫЙ |
| ВЫХ АПД1 НОРМА | ЗЕЛЕНЫЙ |
| ВЫХ АС2 НОРМА | ЗЕЛЕНЫЙ |
| ВЫХ АПОИ2 НОРМА | ЗЕЛЕНЫЙ |
| ВЫХ АПД2 НОРМА | ЗЕЛЕНЫЙ |
| ДАТЧИК 1 РАБОТА | ЗЕЛЕНЫЙ |
| ДАТЧИК 2 РАБОТА | ЗЕЛЕНЫЙ |
| ИМИТАТОР | ЗЕЛЕНЫЙ |
| ЮСТИРОВКА | ЗЕЛЕНЫЙ |
| МУ | ЗЕЛЕНЫЙ |
| МУ ДАТЧИК 1 | ЗЕЛЕНЫЙ |
| МУ ДАТЧИК 2 | ЗЕЛЕНЫЙ |
| МУ ИМИТАТОР | ЗЕЛЕНЫЙ |
| UHUDSHENIE | ЖЕЛТЫЙ |
| ВЫХ АС\ АВАРИЯ | КРАСНЫЙ |
| ВЫХ АПОИХ АВАРИЯ | КРАСНЫЙ |
| ВЫХ АПДХ АВАРИЯ | КРАСНЫЙ |
| ВЫХ АС2 АВАРИЯ | КРАСНЫЙ |
| ВЫХ АП0И2 АВАРИЯ | КРАСНЫЙ |
| ВЫХ АПД2 АВАРИЯ | КРАСНЫЙ |
| АВАРИЯ | КРАСНЫЙ |
| АВАРИЯ 1 | КРАСНЫЙ |
| АВАРИЯ 2 | КРАСНЫЙ |
6. Описание принципиальной схемы устройства
Все активные элементы на плате требуют питания 5 В и, согласно ТЗ, необходимо осуществить преобразование входного напряжения 27 В в напряжение 5 В, а также осуществлять управление включением и выключением питания оптических датчиков, необходимо использовать дополнительные управляемые преобразователи напряжения.
В качестве источников питания выберем модули питания фирмы ИРБИС Данные модули являются высокоэффективными преобразователями, изготовленными с использованием технологии поверхностного монтажа на импортной элементной базе. Кроме этого модули имеют гальваническую развязку, высокую стабильность выходного напряжения, защиту от перегрузки и короткого замыкания, а также малые габариты и вес.
Так как, согласно ТО на ПЛИС фирмы ALTERA, микросхема FLEX 10K20TC144 - 3 требует наличия подтягивающих к напряжению питания резисторов сопротивлением 1 КОм, выберем в качестве последних резисторы С2-33 и резистивную матрицу - Б19К-2-1 КОм±10% Обычно данным микросхемам требуется наличие емкостей по питанию для сглаживания возникающих пульсаций, согласно рекомендации фирмы ALTERA выберем следующие конденсаторы:
- керамические - К10-17в-Н90-0.1 мкФ.
- электролитические - К10-17б-Н90-2.2 мкФ.
Схемы ТТЛ имеют определенные ограничения на длительность переднего и заднего фронтов входных импульсов и не реагируют на медленно изменяющиеся сигналы, поэтому для формирования крутых фронтов будем использовать микросхемы 533ТЛ2, являющимися объединенными в один корпус 6-ю триггерами Шмидта.
Для обеспечения работы блока системы индикации будем использовать микросхемы 530ЛН2, являющиеся 6-ю элементами НЕ с открытым коллектором, так как для их работы необходимы подтягивающие к напряжению питания резисторы, выберем в качестве последних - резисторы С2-33-0.125-510 Ом±10%-А-Д-В.
Для усиления формируемых микросхемой импульсов будем использовать буферные каскады, организованные на транзисторах 2ТЗ117А.
Для создания синхроимпульсов, частотой 20 МГц, будем использовать типовую схему кварцевого генератора с резонатором - К1-4ДС-20М,
Для реализации возможности перепрограммирования микросхемы, в качестве разъема для подключения кабеля BYTEBLASTER выберем IDC BH10R.
7. Расчет тока потребления
Ток потребления микросхем серии FLEXI0K20 фирмы ALTERA и ПЗУ ЕРС2 составляет, согласно практическим данным, 65 мА.
Ток потребления системы индикации рассчитаем исходя из следующих положений: прямой ток светодиодов фирмы KingBright составляет 20 мА. Так как количество используемых нами светодиодов равно 24, общий ток потребления всей индикацией при одновременном включении всех светодиодов составит 480 мА, выберем его с запасом 500 мА.
Ток потребления оптического датчика, согласно ТО, не превышает 150 мА. Таким образом, ток потребления двумя оптическими датчиками при их совместной работе будет равен 300 мА.
Так как, согласно заданию, устройство должно формировать ТТЛ импульсы, а нагрузкой является стандартное сопротивление 75 Ом, максимальный ток нагрузки, при формировании логической единицы будет равным I1=5/75=66 mA. Так как выходной ток ПЛИС не может быть больше
25мА на один контакт, применим схему усилителя выходного тока икросхемы. В качестве усилительного элемента будем использовать транзистор 2Т3117А. Усилительный каскад построим по схеме с включением транзисторов с общим коллектором. Режим работы транзистора - ключевой. Так как известен ток в нагрузке, ток базы транзистора найдем из следующих соображений: IK =h2l3Ib, тогда Ib = 733мкА где h2l3CP - средний коэффициент усиления, h2l3.=90.Таким образом, для работы на заданную нагрузку необходим ток базы транзистора 733 мкА.
Так как длительность формируемых импульсов не значительна 40 ± 8 мкс, искажения фронтов усиливаемых сигналов будут невелики, (так как fс = 25 кГц).
Так как, согласно ТЗ, число формируемых импульсов для АС1, АПД1, АПОИ1, АС2, АПД2 и АПОИ2 равно 12, число усилительных каскадов выберем также равным 12-и.Тогда ток потребления всеми каскадами приближенно найдем как 1П0ТР =IK -N, где N- число каскадов усиления. 1потр =66 мА *12 = 792 мА, примем ток потребления равным 1П0ТР =800 мА
Тип источников питания выберем исходя из требуемой входной мощности устройства. Так как, согласно ТЗ, необходимо осуществлять включение и выключение питания двух оптических датчиков независимо друг от друга, и ток потребления каждого из них равен 150 мА, мощность источника питания найдем как: Рист =150 мА • 5В = 750 мВт. Таким образом, для питания двух оптических датчиков выберем два источника серии МПВЗА с максимальной выходной мощностью ЗВТ каждый, так как источники питания с меньшей выходной мощностью не имеют входа управления..
Так как ток потребления всей логической схемой устройства равен: IПОТР = IПЛИС + IИНД + IУС, где IПЛИС – ток потребления микросхемой ПЛИС, IИНД-ток потребления системой индикации, 1УС - ток потребления усилительными каскадами. IПОТР = IПЛИС + IИНД + IУС = 66.5 мА + 0.48 А + 0.8 А = 1.34 А
Мощность потребления логической частью устройства найдем как Рлог =1.34 А*5 В = 6.7 Вт. Таким образом, выберем источник питания серии МПВ10А с максимальной выходной мощностью 10 Вт.
8. Описание конструкции
Конструкция разработанного устройства представляет макетную плату из стеклотекстолита СФ2-35-1,5 толщиной 2 мм типоразмером 200x170 мм. Плату предполагается разместить в специальном блоке. Элементы на плате располагаются равномерно по рядам. Крупные микросхемы удобно располагать по краям платы. Все компоненты схемы располагаются на плате преимущественно по своим функциональным группам. Керамические и электролитические конденсаторы по питанию располагаются непосредственно рядом с микросхемой ПЛИС. Вблизи источников питания располагаются электролитические конденсаторы для сглаживания пульсаций. Сами источники питания помещаются по возможности подальше от разъема СНП-34С-135, вблизи которого помещаются элементы схемы, контактирующие непосредственно с ним. Индикаторы располагаются на лицевой панели блока, так как большое их число не позволяет разместить их на самой плате устройства. К конструкции устройства предъявляются специфические требования с точки зрения надёжности, габаритов и массы, влияние внешней среды, и др. На работу оборудования существенным образом влияет изменение температуры, давления и влажности. Проникая внутрь блоков, влага вызывает коррозию элементов и металлических деталей, снижает качество изоляции диэлектриков. Для уменьшения влияния влаги на работу
устройства, его элементы и места пайки, а также саму плату покрывают влагонепроницаемым лаком.
9. Организационно-экономический раздел
Темой данного проекта является разработка устройства сопряжения оптических датчиков антенны с аппаратурой радиолокатора. В организационно-экономическом разделе проекта проводится планирование опытно-конструкторских работ методом сетевого планирования, рассчитывается себестоимость выполняемых работ, стоимостная оценка результатов, а также вычисляется срок окупаемости нового изделия
9.1 Технико-экономическое обоснование
Устройство сопряжения реализует контроль, имитацию сигналов, идущих с 2 оптических датчиков обзорного радиолокатора под воздействием внешних управляющих сигналов, а также осуществляет формирование выходных сигналов заданной формы и длительности для аппаратуры передачи данных, сопряжения и первичной обработки информации.
Экономический эффект будет заключаться в возможности изготовления заданного устройства на современной радиоэлектронной базе с использованием программируемых логических интегральных микросхем фирмы ALTERA.
Так как устройства должно работать с цифровыми сигналами стандартных TTL уровней и на него возложено достаточно много функций: функционирование под большим числом управляющих входных сигналов и сигналов внутреннего управления, контроль параметров входных сигналов, управления внешними устройствами, формирование выходных сигналов, сигналов управления и состояния а также их самоконтроль, то результатом изготовления его с использования обычных логических элементов может стать достаточно сложное устройство. Более того, оно будет громоздким и, в связи с большим числом логических элементов, ненадежным.
Все это говорит о том, что процесс производства данного устройства будет связан с большими затратами и его изготовление будет невыгодным.
Предлагаемое решение позволяет избежать этих проблем. Программируемые интегральные микросхемы фирмы ALTERA обладают огромными возможностями и позволяют объединить все вышеуказанные функции в один корпус. Более того, ПЛИС позволяют легко корректировать и изменять логический проект на кристалле, не изменяя саму плату на которой находится микросхема, реализуя таким образом возможность добавления новых функций в работу устройства без каких - либо внешних изменений.
Создание же самой схемы внутри ПЛИС максимально упрощено, благодаря использованию специально разработанной фирмой ALTERA системы автоматического проектирования MAX+plus, позволяющей разработчику программировать основные функции микросхемы с помощью набора обычных простых цифровых логических элементов, а также большого числа специфических элементов, находящихся в встроенной библиотеке.
Данная фирма выпускает большой ряд микросхем, имеющих разные характеристики и функциональные возможности, зачастую цены на некоторые микросхемы составляют менее 10 условных единиц, что говорит о высокой эффективности использования ПЛИС в разных системах цифровой обработки сигналов.
9.2 Сетевое планирование
Сетевое планирование широко применяется для оптимизации управления сложными разветвленными комплексами работ.
Для построения сетевого графика составляется перечень работ, их временных параметров, а также численность исполнителей по категориям.
Ожидаемая продолжительность работы tij в сетевом графике рассчитывается по двух оценочной методике, исходя из минимальной tij min и максимальной tij max оценок продолжительности. При этом, предполагается, что минимальная оценка соответствует наиболее благоприятным, а максимальная -наиболее неблагоприятным условиям работы.
Ожидаемая продолжительность каждой работы рассчитана по формуле:
![]() (1)
(1)
Среднеквадратическое отклонение σij продолжительности работы от ожидаемой продолжительности в двух оценочной методике равно:
![]() (2)
(2)
Дисперсия определяется по формуле:
![]() (3)
(3)
На основании полученных данных заполняем таблицу 2. "Перечень и параметры работ сетевого графика".
Таблица 2 - Перечень и параметры работ сетевого графика
| Код работы | Название работы | Продолжительность (дней) | Исполнители (чел.) | ско | Дисперсия (дней) | ||||
| Мин. | Макс. | Ожид. | Рук. | Инж. | Лаб. | ||||
| 0-1 |
Получение ТЗ на разрабатываемое устройство |
1.0 | 3,5 | 2.0 | 1 | 1 | 0 | 0,5 | 0,3 |
| 1-2 | Утверждение ТЗ заказчиком | 1,8 | 4,8 | 3.0 | 1 | 1 | 0 | 0,6 | 0,4 |
| 2-3 |
Сбор и систематизация научно-технической информации |
1,6 | 10,1 | 5.0 | 0 | 1 | 0 | 1,7 | 2,9 |
| 2-4 |
Изучение условий эксплуатации разрабатываемого изделия |
1.0 | 3,5 | 2.0 | 0 | 1 | 0 | 0,5 | 0,6 |
| 3-5 |
Анализ задания на дипломное проектирование |
1.0 | 3,5 | 2.0 | 0 | 1 | 0 | 0,5 | 0,6 |
| 4-5 | Разработка сетевого графика | 3,2 | 5,2 | 4.0 | 0 | 0 | 0 | 0,4 | 0,2 |
| 5-6 |
Разработка и обоснование структурной схемы |
2,2 | 4,2 | 3.0 | 0 | 1 | 0 | 0,4 | 0,2 |
| 5-7 |
Разработка и обоснование функциональной схемы |
2,4 | 3,9 | 3.0 | 0 | 1 | 0 | 0,3 | 0,1 |
| 6-8 |
Анализ известных тех. решений, реализующих требуемые параметры изделия |
2.0 | 4,5 | 3.0 | 0 | 1 | 0 | 0,5 | 0,3 |
| 7-8 | Выбор элементной базы | 3.0 | 5,5 | 4.0 | 0 | 1 | 0 | 0,5 | 0,3 |
| 8-9 |
Изучение системы проектирования устройств на ПЛИС - MAX+PLUSII |
5,2 | 14,7 | 9.0 | 0 | 1 | 0 | 1,9 | 3,6 |
| 8-10 | Разработка основного проекта в MAX+PLUSII | 3,2 | 12,7 | 7.0 | 0 | 1 | 0 | 1,9 | 3,6 |
| 9-10 | Моделирование работы прототипа | 1.0 | 3,5 | 2.0 | 0 | 0 | 1 | 0,5 | 0,3 |
| 10-11 | Анализ моделирования | 1.0 | 3,5 | 2.0 | 0 | 1 | 1 | 0,5 | 0,3 |
| 11-12 |
Разработка электрической принципиальной схемы устройства |
2,6 | 3,6 | 3.0 | 0 | 1 | 0 | 0,2 | 0,5 |
| 12-13 | Построение временных диаграмм | 1.0 | 3,5 | 2.0 | 0 | 0 | 1 | 0,5 | о,з |
| 13-14 |
Выбор элементов и расположение их на печатной плате |
1.0 | 3,5 | 2.0 | 0 | 1 | 0 | 0,5 | 0,3 |
| 12-14 |
Формулировка требований на конструкцию изделия |
1.0 | 1.0 | 1.0 | 1 | 1 | 0 | 0 | 0 |
© 2010 Интернет База Рефератов