
Рефераты по сексологии
Рефераты по информатике программированию
Рефераты по биологии
Рефераты по экономике
Рефераты по москвоведению
Рефераты по экологии
Краткое содержание произведений
Рефераты по физкультуре и спорту
Топики по английскому языку
Рефераты по математике
Рефераты по музыке
Остальные рефераты
Рефераты по авиации и космонавтике
Рефераты по административному праву
Рефераты по безопасности жизнедеятельности
Рефераты по арбитражному процессу
Рефераты по архитектуре
Рефераты по астрономии
Рефераты по банковскому делу
Рефераты по биржевому делу
Рефераты по ботанике и сельскому хозяйству
Рефераты по бухгалтерскому учету и аудиту
Рефераты по валютным отношениям
Рефераты по ветеринарии
Рефераты для военной кафедры
Рефераты по географии
Рефераты по геодезии
Рефераты по геологии
Рефераты по геополитике
Рефераты по государству и праву
Рефераты по гражданскому праву и процессу
Рефераты по делопроизводству
Рефераты по кредитованию
Рефераты по естествознанию
Рефераты по истории техники
Рефераты по журналистике
Рефераты по зоологии
Рефераты по инвестициям
Рефераты по информатике
Исторические личности
Рефераты по кибернетике
Рефераты по коммуникации и связи
Дипломная работа: Микропроцессорная система охранной сигнализации автомобиля
Дипломная работа: Микропроцессорная система охранной сигнализации автомобиля
Микропроцессорная система охранной сигнализации автомобиля
ВВЕДЕНИЕ
С появлением частной собственности появились лица, которые захотели ее получить незаконным путем. Среди множества материальных ценностей изобретённых человеком автомобиль занимает особое место. Являясь средством передвижения, он обладает значительной стоимостью и при этом очень часто бывает вне пределов видимости своего хозяина. Благодаря этому тенденция к хищению и раскомплектации личных автотранспортных средств постоянно растет. Чтобы противостоять этому, необходимо устанавливать дополнительные устройства на автомобиль, которые затрудняют злоумышленнику его чёрную работу. Эффективным методом является использование систем охранной сигнализации. Как показывает статистика, автомашины, оборудованные системой сигнализации, менее подвергаются угону или раскомплектации. Существующие ныне системы охранной сигнализации обладают недостаточными функциональными возможностями или большой стоимостью. Следовательно, есть потребность в разработке дешевых, не сложных в производстве и установке систем охранной сигнализации которые в то же время обладают достаточной функциональной насыщенностью, надежностью чтобы без ущерба выполнять свои функции- предупредить хищение или раскомплектацию автотранспортного средства.
Для расширения функциональных возможностей и для снижения стоимости при разработке охранных систем необходимо использовать микропроцессоры, что позволит реализовать аппаратуру с улучшенными техническими и потребительскими характеристиками.
Цель и задача настоящей работы:
1. На основе использования современной элементной базы (PIC контроллеры) и современных принципов организации информационного обмена между разнесенными объектами, разработать систему передачи извещений о проникновении отличающуюся: гибкостью (легкость и простота разворачивания, возможность конфигурирования);
2. надежностью (автоматический контроль за состоянием системы, канала передачи информации о состоянии системы и объектов охраны);
3. расширенными функциональными возможностями и простотой в обращении (автоматическая постановка под охрану и снятие с охраны объектов);
4. низкой себестоимостью, высокой экономичностью.
1. ОБЗОР АНАЛОГИЧНЫХ ТЕХНИЧЕСКИХ РЕШЕНИЙ
1.1 Устройства и системы предотвращения угонов и посягательств на автомобиль
Проблема охраны автомобилей от посягательств в настоящее время весьма актуальна. В связи с этим производится большое число разнообразных защитных и охранных устройств. Наиболее простые из них представляют собой механические приспособления (например, специальные запорные устройства, блокирующие рычаг переключения передач, колесо рулевого управления, педаль газа и т.д.). Более сложные - электронные системы охраны.
Наиболее простой электронной системой охраны автомобиля от угона является иммобилайзер [1]. Иммобилайзер - средство пассивной защиты - дополнение к замку зажигания. Он может блокировать следующие цепи.
В автомобиле с бензиновым двигателем:
- питание системы зажигания;
- питание катушки зажигания;
- запуск стартера;
- запуск электрического топливного насоса;
- включение топливного электроклапана (если установлен);
- управление инжектором;
В автомобиле с дизельным двигателем:
- цепь включения калильных свечей;
- запуск стартера;
- запуск электрического топливного насоса;
- включение топливного электроклапана (если установлен);
Простейший вариант представляет собой скрытый в потайном месте выключатель.
Рассмотрим современные иммобилайзеры на примере иммобилайзера CYBORG (США). Управление этим иммобилайзером осуществляется плоским электронным ключом, выполненным по технологии фирмы DALLAS, который представляет собой энергонезависимую микросхему памяти с однопроводным протоколом обмена данными. Разрыв необходимых электрических цепей автомобиля производится с помощью специальных устройств – блокираторов. Управление ими осуществляется с помощью новой технологии Digital Code Communication Network (коммуникационная сеть с цифровым кодом), благодаря которой появилась возможность посылать кодовые сигналы по штатной проводке автомобиля. Цифровой код для деактивации блокираторов передается по всей сети. Это позволяет располагать их в любом месте автомобиля, не соединяя проводами с центральным блоком. Определить место расположения блокираторов для угонщика автомобиля крайне затруднительно. Максимальное количество блокираторов, и соответственно, цепей разрыва – восемь. Возможно программирование времени задержки активации каждого блокиратора.
Иммобилайзер CYBORG обеспечивает выполнение следующих функций:
- Активация устройства осуществляется автоматически через 1 минуту после выключения зажигания.
- Деактивация производится с помощью электронного ключа, который необходимо вставить в приемное гнездо считывателя. Загорается индикатор, и у водителя есть 1 минута для запуска двигателя.
Иммобилайзер CYBORG способен запрограммировать коды 4-х ключей, а так же стереть из памяти коды утерянных ключей. Он имеет высокую степень помехозащищенности и может быть установлен на любые отечественные автомобили.
Тем не менее при всех своих достоинствах, проблемы защиты от раскомплектации как механические устройства, так и эта система не решает. Проникнув в автомобиль, грабитель может применить весь арсенал техники (жидкий азот, дисковые пилы и т.д.) и в благоприятных условиях никто ему не будет мешать.
Следующим классом охранных устройств являются охранные сигнализации. Сигнализация в классическом исполнении (рис.1.1) состоит из:
- центрального блока;
- внешних датчиков;
- сирены;
- реле блокировок;
- кодового брелка.
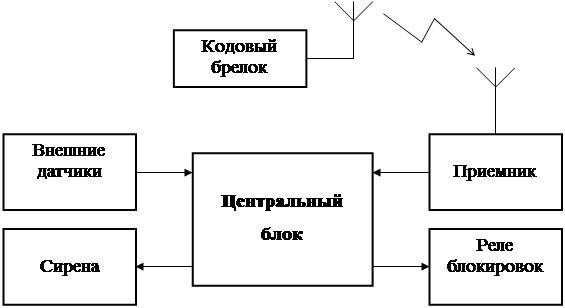 |
Рис.1.1. Устройство сигнализации в классическом исполнении.
Современные охранные сигнализации это сложные электронные устройства, которые имеют дистанционное управление, некоторые функции иммобилайзера (в отдельных моделях есть и полноценные иммобилайзеры) а также выполняют множество сервисных функций. Включенная сигнализация контролирует ряд точек в автомобиле, и, в случае вторжения, включает звуковые и световые сигналы для привлечения внимания и иногда выполняет и некоторые другие функции. Количество контролируемых точек зависит от комплекта поставки и количества дополнительных датчиков, подключаемых к сигнализации.
1.2 Датчики, применяемые в автомобильных сигнализациях
Электроконтактные устройства (ЭУ) стали использоваться для защиты и распознавания проникновения ранее всех остальных электронных и электрических охранных приборов и тот факт, что различные их разновидности всё ещё используют и поныне свидетельствует о наличии у них достоинств в определённых ситуациях [2]. ЭУ, вмонтированные в коробку двери (капота, багажника) известны как дверные контакты (дверные выключатели, концевые переключатели). Эти контакты всегда есть в дверях (соединены с лампой плафона). Установка их в багажнике и капоте не представляет труда. Достоинства данных датчиков: определённость действия (однозначность перехода между рабочими ситуациями и малая реакция на случайные помехи), высокая надёжность. Но есть и проблемы: загрязнение поверхности контактов, окисление, нагрев зоны контакта. Место установки контактов трудно скрыть, и традиционно считается, что их легко вывести из строя, закрепив рычажок в закрытой позиции кусочком жевательной резинки, если у преступников есть предварительный доступ к интересующей их двери.
Широкое применение нашли герконовые (магнитоуправляемые) датчики, когда контакты замыкаются при приближении магнита, установленного, например, на дверях. Но опытный преступник может нейтрализовать их, используя мощный внешний магнит. Однако, реально трудно одновременно удерживать магнит в требующемся положении открывать дверь. Более того, фирма Sigma, например, выпускает герконовые датчики, экранированные от постоянного магнитного поля специальными защитными пластинами-экранами и снабжённые специальными герконовыми контактами, срабатывающими в присутствии постороннего поля.
Ударный датчик. Ударный датчик представляет собой устройство, которое улавливает вибрации корпуса автомобиля. Если амплитуда вибраций превышает заданную величину, ударный датчик вызывает срабатывание сигнализации. Традиционно, ударные датчики являются самыми простыми и дешевыми, среди применяемых в автомобильных сигнализациях. Они поставляются, как правило, в базовом комплекте. Серьезным недостатком ударного датчика является нечувствительность к качанию и высокая чувствительность к помехам. Ударный датчик может с большим приоритетом срабатывать на проезжающие мимо тяжелые автомобили, чем на откручивание колеса.
Обычно, вибрационный датчик [3] содержит корпус, в котором соосно размещены верхний и нижний контакты, между которыми размещён сферический элемент из электропроводящего материала, в верхней части корпуса размещена с возможностью перемещения крышка, верхний контакт соединён с крышкой, а нижний контакт - с корпусом. С целью расширения области использования датчика, нижний и верхний контакты выполнены в форме шайбы, причём опорная поверхность верхнего контакта выполнена в форме углубления конической формы, а опорная поверхность нижнего контакта выполнена в виде углубления сферической формы.
Ударный датчик охранной сигнализации может содержать корпус [4], в котором размещён чувствительный узел, выполненный в виде подвижного и неподвижного элементов с возможностью их взаимодействия. В такой датчик введены винтовой элемент, пластина с отверстием и стопорное кольцо. Корпус выполнен в виде колпака с дном, в котором выполнено отверстие, в котором размещена пластина, закреплённая стопорным кольцом. Неподвижный элемент чувствительного узла выполнен в виде полого цилиндра из поляризованного пьезокерамического материала, на торцах цилиндра размещены обкладки, цилиндр размещён на пластине соосно с её отверстием. Подвижный элемент чувствительного узла выполнен в виде маятника, нить которого соединена с винтовым элементом, а инерционная масса маятника размещена во внутреннем диаметре цилиндра, обкладки которого являются выходами датчика.
К данному классу относится и лазерный датчик, принцип работы которого заключается в смещении чувствительного элемента фотоприемника относительно узкого луча полупроводникового светодиода при вибрациях и ударах по кузову автомобиля.
Основной недостаток вышеупомянутых вибродатчиков - труднорегулируемая чувствительность [5].
Датчик качания. Очень простой датчик. Опишем датчик колебаний кузова, пригодного для совместной работы с цифровыми автомобильными сторожевыми устройствами (выходное напряжение может принимать значения, соответствующие принятым логическим уровням цифровых микросхем) [6]. Благодаря своим высоким характеристикам подобные датчики весьма популярны у автолюбителей. Датчик формирует импульсный выходной сигнал, содержит минимальное число элементов, может работать в широком интервале напряжений без существенных изменений основных характеристик. В качестве чувствительного элемента, преобразующего механические колебания в электрические сигналы, используется малогабаритный микроамперметр М476/1 с утяжелённой стрелкой. Даже при незначительном толчке подвижная система начинает колебаться, и на выходе микроамперметра появляется напряжение, по форме близкое к синусоидальному. Усилитель-преобразователь собран на компараторе, а не на традиционном операционном усилителе. Отсюда и все основные преимущества. Большой коэффициент усиления (не менее 150 000 для К554СА3) позволяет добиться высокой чувствительности датчика в целом во всём интервале питающего напряжения (5..15 В), а выходная ступень компаратора упрощает сопряжение его с любыми цифровыми микросхемами. Налаживание устройства заключается в установке требуемой чувствительности резистором, изменяя напряжение смещения “нуля”, приведённого ко входу.
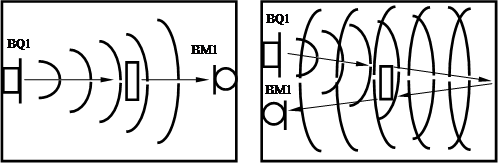
Ультразвуковой сканер. Ультразвуковой сканер предназначен для обнаружения движения в салоне. Он относительно не сложен, доступен по элементной базе и не требует для налаживания узкоспециальной аппаратуры.
 |
а) б)
Рис1.2. Строение системы УЗ обнаружения.
Излучатель и приёмник располагают как показано на рис.1.2.а,б [7]. Излучатель ВQ1 возбуждает стабильные по частоте и амплитуде ультразвуковые колебания (хотя можно применять и специальное амплитудное заполнение [19]). Принятый УЗ сигнал микрофон ВМ1 преобразует в электрический. Далее в электронном устройстве сигнал претерпевает усиление, детектирование и анализ по амплитуде. При колебании амплитуды УЗ сигнала устройство формирует сигнал тревоги. Энергия волны в зоне микрофона есть результат интерференции всех падающих волн (прямая волна, отражения от всех предметов в объёме). Какое-либо движение отражающих или поглощающих поверхностей или изменение физических свойств Среды приведёт к изменениям путей прохождения волн, а следовательно, к изменениям интерференционной картины. Это приведёт к колебаниям амплитуды микрофона.
Способ на рис.1.2а экономичнее, т.к. волна от излучателя к приёмнику проходит по наиболее короткому пути с наименьшим затуханием. Но высока вероятность ложной тревоги из-за возможных потоков воздуха. Сложение скорости звука со скоростью воздуха воспринимается как перемещение объекта. При втором способе на рис.1.2б длина пути волны увеличится, что потребует увеличение излучаемой мощности. Но при этом приращение скорости взаимно компенсируется, что и повышает устойчивость устройства к ложным тревогам в условиях относительно равномерных потоков воздуха, движущихся в любых направлениях. Однако, нестабильность интерференционной картины из-за деформации стекол и дверей в результате порывов ветра снаружи, вибрации и т.д. заставили применять более помехоустойчивый метод детектирования сигнала - не по амплитуде, а по частоте. При любом перемещении объекта (особенно вдоль распространения волны) отражённая от него волна будет иметь некоторое смещение по частоте относительно излучаемой. Это явление получило название эффекта Доплера. Поэтому движущийся объект не может быть не обнаружен. К недостаткам ультразвукового сканера относятся:
- низкая чувствительность к медленным перемещениям;
- возможность экранирования излучателя (звукоизолирующим материалом);
- ложные срабатывания при воздействии конвекционных потоков воздуха.
Микроволновой сканер. Микроволновой сканер обнаруживает движение внутри салона и вблизи автомобиля. Его действие основано на интерференции радиоволн сантиметрового диапазона. Устройство очень эффективно, но нуждается в тщательной регулировке, т.к. его действие может распространяться за пределы автомобиля и вызывать ложные срабатывания. Микроволновой сканер нечувствителен к движению потоков воздуха, шумам, вибрациям, но не обнаруживает медленные движения. Существуют двухпороговые модели, позволяющие реализовать отпугивание при приближении к автомобилю. Наибольшее распространение получили микроволновые сканеры AU-94 и AU-94T (одно-зонный и двухзонный соответственно). Среди микроволновых сканеров отечественного производства можно рассмотреть сканер «АРГУС-АВТО2», который изготавливается Санкт-Петербургским АО «Аргус-Спектр» [ ]. Эта модель является 2-х зонной, предназначена для использования в качестве дополнительного или основного датчика в автомобильных охранных системах с дистанционным управлением и имеет следующие технические характеристики:
- рабочий диапазон питающих напряжений, В от 8 до 25
- рабочий диапазон температур,°С от –30 до +50
- ток потребления в режиме «Охрана», мА не более 20
- количество охраняемых зон 2
- количество регулировок чувствительности 2
- допустимый ток нагрузки сигнальных цепей, мА не более 500
- габаритные размеры, мм 66х48х25
- масса, г не более 50
Принцип работы:
Внешняя зона- обеспечивает охрану некоторого периметра вокруг автомобиля и зависит от типа автомобиля и места установки сканера. Внутренняя зона- имеет меньший радиус действия и может быть настроена на охрану салона автомобиля. При движении объекта внутри внешней зоны (не пересекая внутреннюю) на исполнительное устройство периодически поступает сигнал тревоги длительностью 5+1 сек. по сигнальной цепи внешней зоны. При пересечении границы внутренней зоны по сигнальной цепи этой зоны поступает сигнал тревоги 5+1 сек. При дальнейшем движении объекта внутри внутренней зоны этот сигнал тревоги периодически повторяется, а по цепи внешней зоны сигнал тревоги выдается непрерывно.
Рекомендуемые места установки:
- внизу возле кулисы коробки передач или между креслами (при этом обеспечивается оптимальная настройка внутренней зоны);
- на потолке в центре (при этом обеспечивается симметрия зон по длине автомобиля);
- на потолке между светозащитными козырьками (при этом обеспечивается максимальная внешняя зона в направлении капота автомобиля).
Датчик изменения объема салона. Датчик изменения объема салона обнаруживает изменение давления воздуха при открывании двери. Распространенный тип датчика AU-95T.
Датчик разбития стекла. Датчик разбития стекла - датчик микрофонного типа, реагирует на характерный звук разбивающегося стекла. Однопороговые датчики срабатывают даже от звука разбиваемой рядом с автомобилем бутылки, а при понижении чувствительности – вовсе не реагируют. Срабатывание таких датчиков в большей степени зависит от сорта стекла, его толщины и расположения датчика относительно стекла. Двухпороговые датчики регистрируют звук удара по стеклу и звон разбиваемого стекла. Для индикации тревоги такой датчик должен зарегистрировать два соответствующих сигнала с интервалом не более 150 мс.
Датчик падения напряжения бортсети. При включении какого-либо электрооборудования в бортсети автомобиля возникают небольшие броски напряжения. Датчик анализирует эти броски напряжения, идентифицирует подключение и выдает сигнал вторжения в автомобиль. Датчики такого типа, обычно встраивают в центральный блок и входят в базовые комплекты многих сигнализаций.
Сирены. В качестве устройства звукового оповещения широко используются сирены, которые предназначены для беспроводной охраны объектов. Ясно, что такого средства оповещения недостаточно для систем высокого уровня. Особенно, если это вызывает недовольство, например, соседей в ночное время. Однако, мощный звуковой сигнал отпугивает злоумышленников и привлекает внимание охраны или потенциальных свидетелей[8]. Такие устройства должны отвечать следующим требованиям:
минимальный потребляемый ток в режиме ожидания,
мощный звуковой сигнал,
максимальная простота при минимальных габаритах,
высокий КПД,
иметь, по возможности, автономное питание,
характер звукового рисунка должен позволять хозяину реагировать лишь на сигналы своего автомобиля.
В звуковых сигнализаторах важным элементом является звуковой излучатель. Большинство сирен используют динамические головки, что приводит к повышенному расходу энергии источника питания. Однако, обладая весьма малыми габаритами и сравнительно большой громкостью, пьезокерамические излучатели (например, СП-1) [9] способны дать лучшие результаты по сравнению с динамической головкой при использовании их в различных охранных устройствах. Ведь согласно паспортным данным, при подаче на СП-1 переменного напряжения амплитудой 25 В и частотой 3–4 кГц (резонансная частота излучателя) уровень звукового давления достигает 100 dB — этого достаточно, чтобы прозвучал громкий сигнал тревоги. Кроме того, такой сигнал весьма неприятен для слуха.
Из промышленно выпускаемых сирен можно выделить двухтональную электродинамическую SR-74 (120 dB, 12 В), двухтональную с автономным питанием MITRIDAT S-35B (120 dB), двухтональную пьезоэлектрическую TA-AS (125 dB, 12В) [10].
1.3 Питание
При питании от бортовой сети автомобиля микропроцессорных устройств надо предпринимать особые меры [11]. При неработающем двигателе, когда напряжение в ней определяется напряжением аккумулятора и составляет примерно 12 В, можно использовать цепочку “вычитающих” диодов. При запуске двигателя бортсеть питается от генератора, напряжение которого поддерживается реле-регулятором на уровне 14 В. При этом желательно применять вместо диодов стабилитрон, включённый в обратном направлении. В бортсети часто из-за увеличения переходных сопротивлений или неисправности реле-регулятора напряжение повышается до 16 В и более, что может привести к порче электронных систем. Поэтому, питание следует производить через стабилизатор напряжения [12]. Стабилизатор обязательно должен иметь предохранитель, а лучше – схему защиты от коротких замыканий. Аппаратуру следует снабдить защитным диодом, включённым в прямом направлении в цепь питания, если потеря до 10% напряжения источника на нём не сказывается на работе системы. Корпус автомобиля используется в качестве отрицательного проводника в системе автомобильного электрооборудования.
1.4 Применение радиоканала
Применение для оповещения лишь звуковой сигнализации и (или) мигания фар не всегда надёжно и удобно. С развитием средств связи более широко начали использовать радиоканал. С его же помощью возможно дистанционное управление аппаратурой автомобиля.
В качестве электронного ключа и пульта управления применяют кодовые брелки. Кодовый брелок – миниатюрный передатчик, работающий, как правило, в диапазоне дециметровых волн (200– 50 МГц). В таблице приведены значения частот для некоторых стран.
Таблица 1.1. Рабочие частоты кодовых брелков.
| Страна | Рабочая частота, МГц |
| Франция | 244,50 |
| Италия, США, Испания, Австралия, Греция | 300,10 |
| Великобритания | 418,00 |
| Германия, Скандинавия | 433,92 |
При срабатывании датчика передатчик начинает излучать радиосигнал, модулированный импульсным кодом, формируемый шифратором. Приёмник с дешифратором выделяет из массы сигналов “свой” сигнал и включает генератор тревожного сигнала.
При использовании в автомобилях радиоканала наиболее трудной задачей является выполнение антенны [13]. Применение выступающих передающих, например штыревых, антенн практически исключается из-за возможности повреждения злоумышленником [14].Данный недостаток устраняется периодической проверкой линии связи. Дальность и устойчивость работы также зависит от правильности выбора антенно-фидерной системы. Диаграмма направленности антенны должна быть близка к круговой в плоскости горизонта и узкой по вертикали[15]. При горизонтальной поляризации глубина интерференционных провалов больше, чем при вертикальной. Поэтому в низовой радиосвязи целесообразно применение вертикальной поляризации [16]. Диаграмма направленности антенны в автомобиле отличается от диаграммы с свободном пространстве, т.к. результирующее излучение формируется с учётом токов на проводящей поверхности корпуса автомобиля [17]. Интересным решением является использование кузова автомобиля в качестве щелевой антенны [18].
Для повышения устойчивости (уменьшения вероятности блокировки) к помехам применяются системы “развёрнутого” спектра. Передатчики СпредНет передают идентичные сигналы на более чем ста частотах за один импульс. Поэтому радиус действия в три раза больше чем у ближайших конкурентов [19].
В качестве типичной сигнализации, использующей радиоканал, рассмотрим автосигнализацию EXCALIBUR 900JX .
Возможности EXCALIBUR 900JX присущи многим другим сигнализациям. EXCALIBUR 900JX контролирует состояние дверей, капота, багажника автомобиля, а так же оснащен двухпороговым ударным датчиком. Возможно дооборудование микроволновым сканером и пейджером.
Управление сигнализацией осуществляется кодовым брелком на расстоянии. EXCALIBUR 900JX защищен от подбора и перехвата кода из эфира технологией «динамических кодов».
Имеется возможность управления центральным замком автомобиля. Брелком можно также управлять двумя дополнительными устройствами в автомобиле (стеклоподъемниками и отпиранием багажника).
Сигнализация имеет трехступенчатую систему защиты от пропадания питания. Сирена, входящая в комплект, имеет автономное питание. Центральный блок сигнализации также поставляется с автономным источником питания.
В системе EXCALIBUR 900JX предусмотрена возможность отключения охранных функций - гаражный режим. Это позволяет оставлять автомобиль на СТО, не оставляя своего кодового брелка.
При каждодневном использовании сигнализации, достаточно пользоваться одной кнопкой на кодовом брелке, с помощью которой осуществляется включение и выключение режима охраны.
В стоящем под охраной автомобиле разрывается цепь зажигания. Любое несанкционированное проникновение при включенной охране ведет к срабатыванию сигнализации.
При срабатывании сигнализации происходит следующее:
- начинает работать сирена;
- габаритные огни вспыхивают;
- если двери были открыты и закрыты, происходит повторное запирание замков.
Эти действия продолжаются в течении 60 секунд или до выключения сигнализации кодовым брелком.
После окончания цикла, EXCALIBUR 900JX снова станет на охрану, если все проверяемые точки находятся в пассивном состоянии (двери закрыты и т.д.). Если какая-то точка осталась активна к концу 60 секундного цикла, сигнализация проработает 3 минуты и временно исключит эту точку из под контроля.
При срабатывании внешне зоны ударного датчика от слабых ударов, система, вместо полного срабатывания, подает сиреной три сигнала, мигает габаритными огнями и закрывает замки. После пятикратного срабатывания внешней зоны, эта точка исключается из числа контролируемых.
EXCALIBUR 900JX оснащен противоугонной функцией HIJECK, которая затруднит угон автомобиля даже если злоумышленник завладел кодовым брелком и ключами зажигания. Если этот режим включен, то каждый раз, после включения зажигания активизируется противоугонная схема. Для того, чтобы пользоваться автомобилем, необходимо нажать потайную кнопку по истечении 60 секунд с момента включения зажигания.
В том случае, если этого не сделать, на 53 секунде сигнализация короткими звуковыми сигналами напомнит о том, что не была нажата потайная кнопка. На 60 секунде начинают мигать габаритные огни, и включается сирена. Противоугонную функцию уже нельзя выключить простым нажатием потайной кнопки. На 90 секунде EXCALIBUR 900JX разорвет цепи зажигания и заглушит двигатель автомобиля. Теперь сирена и габаритные огни будут работать до полного разряда аккумулятора. Сбросить противоугонную функцию можно только выключив зажигание и не позднее 5 секунд нажав потайную кнопку.
Если сигнализация была снята с охраны но в течении 90 секунд не открывалась дверь салона и не включалось зажигание, то произойдет повторная автоматическая постановка на охрану. Кроме того, имеется ряд дополнительных функций:
- ставить и снимать с охраны все свои автомобили одним брелком;
- определить, что произошло с автомобилем в ваше отсутствие;
- отключать с помощью брелка ударный датчик;
- включать режим «Паника».
Технические характеристики радиоканала:
Рабочая частота 300,1 МГц
Мощность передатчика 8 мВт
Чувствительность приемника 3 мкВ
Радиус действия 30-50 м
Число кодовых комбинаций 18´1018
Интересной разработкой может послужить изделие одной из Российских фирм противоугонная система BLACK BAG.
Работа системы: ложишь в карман карточку, напоминающую водительское удостоверение, садишься в машину, включаешь зажигание, слышишь три коротких звуковых сигнала и пускаешь двигатель. Все – автомобиль снят с охраны без всяких ключей, радиобрелков и клавиш. Если систему не выключить, то через 10 секунд BLACK BUG сделает несколько предупредительных включений сирены. Потом выключит двигатель, но не сразу, а только когда он сбавит обороты до установленного порога. После этого любая попытка пуска блокируется. BLACK BUG периодически проверяет, на месте ли хозяин карточки даже если двигатель не заглушен. Если его не оказалось на месте то смотри выше. Новация в BLACK BUG - способ управления – дистанционный с помощью транспондера. Ключ- «карточка», которая не требует питания. Снимает систему с охраны простым фактом своего присутствия. Достоинства системы:
- скрытность от внешних наблюдателей;
- карточка-ключ имеет индивидуальный код, который нельзя подслушать.
В качестве дополнительных аксессуаров некоторые сигнализации могут оснащаться пейджерами. Пейджер автомобильной сигнализации представляет собой миниатюрный приемник, который владелец машины носит с собой. При использовании пейджера к автосигнализации подключается передатчик, который включается при срабатывании сигнализации. Сигнал от передатчика улавливается приемником и, в случае совпадения кодов передатчика и приемника, пейджер выдает звуковой сигнал.
Реальный радиус действия пейджеров в условиях города колеблется от 300 до 1000 метров. Они могут работать в диапазонах 27 МГц и 300 МГц при мощности передатчика 1,5…4 Вт и 0,5 Вт соответственно.
Характеристики некоторых моделей пейджеров приведены в таблице1.2.
Таблица 1.2 Характеристики пейджеров.
| Наименование модели |
Рабочая частота, МГц |
Мощность передатчика, Вт |
| COP 15-107 | 27 | 1,5 |
| ENFORSER 5905 | 27 | 4 |
| ENFORSER Secopage-35 | 27 | 4 |
| ROAD STAR | 300 | 0,5 |
Некоторые модели пейджеров (ENFORSER Secopage-35) позволяют не только зафиксировать факт срабатывания сигнализации, но и определить по цветовой индикации источник беспокойства (сработал ударный датчик, открыта дверь, капот).
В настоящее время в республике вводится в эксплуатацию комплекс охраны, обнаружения, оперативного розыска и задержания угнанных транспортных средств КОРЗ [20]. При несанкционированном проникновении в транспортное средство, передатчик информационного канала подаёт команду на приёмное устройство владельца, на котором появляется звуковой сигнал, и на приёмную аппаратуру поста ГАИ с фиксацией информации об угоняемом средстве (государственный номер, тип, цвет). Далее с поста ГАИ по командному каналу на угнанном автомобиле через исполнительное устройство включается звуковой сигнал и осуществляется принудительная остановка. Дальность действия по информационному каналу 500-700м., по командному каналу 70-200 м. Радиоохранное устройство владельца Ахова” комплекса КОРЗ подаёт сигнал тревоги при проникновении в автомобиль, взламывании дверей, багажника, капота, попытке снятия колёс и лобового стекла. Сигнал тревоги подаётся в виде прерывистого звукового и светового (мигание фар) сигналов, используется радиоканал. Имеется возможность дистанционной блокировки и разблокировки канала звукового сигнала тревоги [21].
Утверждение в 1993 году нового европейского стандарта телекоммуникаций I–ETS 300 220 послужило для ряда европейских фирм-производителей электронной техники толчком к разработке целого ряда миниатюрных радиомодулей, позволяющих осуществлять беспроводную передачу цифровой информации на расстояние [22].
Характеристики некоторых модулей приведены в таблице 1.3.
Во время пауз между передачами передатчик рекомендуется выключать. Такое управление производится путём коммутации питающего напряжения (посредством, например, полевого транзистора). При выключении приёмника в паузах между передачами сохраняется возможность диагностирования состояния эфира и определять момент начала передачи благодаря специальному выводу “Carrier Detect” (“Обнаружение несущей”). Для этого управляющая система может включаться на короткие промежутки времени. Если при этом выход “Carrier Detect” переходит в активное состояние, приёмник включают на постоянный приём и осуществляют приём информации. Благодаря малым габаритам и низкому энергопотреблению миниатюрные радиомодули могут эффективно применяться в системах охраны транспортных средств и для их дистанционного управления.
Таблица 1.3. Миниатюрные радиомодули.
| Прибор | Функция | Uпит., В | Iпотр.,мА | Скорость предачи, бит/сек. | Дальность,м | Габариты, мм |
| CDP-TX-01 | Передатчик | 5,5..10 | 18 | 4800 | 800 | 36х26х10 |
| CDP-RX-01S | Приёмник | 4,5..14 | 10 | 4800 | 800 | 50х30х8 |
| TXM433A | Передатчик | 6..9 | 10 | 5000 | 200 | 30х20х6 |
| TXM433F | Передатчик | 3..4 | 10 | 10000 | 200 | 30х20х6 |
| SILRX433A | Приемник | 4..9 | 14 | 5000 | 200 | 48х28х6 |
| SILRX433F | Приемник | 4..9 | 14 | 10000 | 200 | 48х28х6 |
| TX-SAW-I.A | Передатчик | 4..12 | 4 | 2000 | 30-50 | 51х16х4 |
| BC-NBK | Приемник | 5 | 3 | 1000 | 30-50 | 38х14х6 |
2. ВЫБОР И ОБОСНОВАНИЕ ТЕХНИЧЕСКИХ ТРЕБОВАНИЙ К СИСТЕМЕ
Требуется разработать радиосистему автономной охранной сигнализации автомобилей. Целью разработки является создание на основе современной элементной базы эффективной системы оповещения о несанкционированных воздействиях на автомобиль, обладающей улучшенными техническими характеристиками и функциональными возможностями.
Назначение разработки предотвращение угонов, хищений, разукомплектований и повреждений автомобилей, обеспечение возможности задержания лиц, допустивших эти действия. Так же в системе должна быть реализована возможность контроля доступа на охраняемую стоянку.
Система предназначена для круглосуточной эксплуатации в закрытых помещениях с естественной вентиляцией.
В зависимости от способа выдачи сигналов о проникновении охранные системы делятся на системы автономной, солидарной и централизованной охраны.
Разрабатываемая система должна реализовывать вариант автономной охраны с возможностью, в перспективе, использоваться в централизованной системе охраны.
Так как регламентирование в области разработки радиоэлектронной аппаратуры весьма объёмно и перечисление всех требований может занять много пространства, то будет более разумным перечислить всю совокупность нормативно–технической документации в отдельном перечне [23,24—49]. Основные требования, предъявляемые к проектируемой охранной системе, будут учитываться непосредственно по ходу разработки системы.
На основе использования современной элементной базы (PIC контроллеры, микросхем динамического кодирования/декодирования) и современных принципов организации информационного обмена между разнесенными объектами, необходимо разработать систему охраны, которая будет характеризоваться следующим:
1. гибкостью (легкость и простота разворачивания, возможность конфигурирования функций);
2. надежностью (автоматический контроль за состоянием системы, передача информации о автомобиле в режиме «Тревога», реализацией режима антиограбления Anti-Hi-Jack );
3. расширенными функциональными возможностями и простотой в обращении (автоматическая постановка под охрану, автоматическое запирание дверей);
4. низкой себестоимостью и экономичностью;
5. возможностью, в перспективе, централизованного наблюдения за объектами;
6. возможностью осуществления контроля доступа на охраняемую автостоянку.
Общие требования.
1. Формировать, получать, обрабатывать и передавать информацию о посягательстве на охраняемый предмет.
2. Формировать, получать, обрабатывать и передавать информацию о действиях пользователя в отношении режимов работы системы.
3. Система должна обеспечивать защиту салона кузова, капота, багажника и других частей автомобиля от несанкционированных воздействий, а также препятствовать угону автомобиля.
4. Вид климатического исполнения бортовых устройств УХЛЗ ГОСТ 15.150–69, приёмника и электронного разблокирующего устройства УХЛ4 ГОСТ 15.150–69.
5. Общие требования к деталям по ОСТ4 ГО.070.014, к сборочным единицам — по ОСТ 4.ГО.070.015.
6. Бортовые устройства системы должны выдерживать без повреждений воздействие механических нагрузок, предусмотренных ГОСТ 3940–84 для изделий устанавливаемых не на двигатель.
7. Система должна разрабатываться по модульному принципу.
8. Отдельные блоки системы должны иметь чёткую маркировку, наносимую непосредственно на корпус и содержащую: наименование блока; товарный знак завода изготовителя; порядковый номер.
Сигнально–охранные требования.
1. Детектирование несанкционированных воздействий на автомобиль подлежат следующие действия:
открывание дверей, багажника или капота — по замыканию контактов датчиков открывания дверей, багажника или капота;
система выдает извещения о посягательстве при получении ею извещений о нарушении шлейфов охранной сигнализации;
снятие стекол, механические воздействия на автомобиль — с помощью датчика ударов;
проникновение в салон автомобиля — с помощью УЛЗ датчика проникновения.
2. Для подачи сигнала тревоги должны использоваться:
звуковой сигнал автомобиля;
световой сигнал с помощью габаритных огней автомобиля;
передача в радиоканал сообщения тревоги с информацией об автомобиле;
Сигналы тревоги должны быть прерывистыми с частотой повторения от 0,5 до 3 Гц, длительность звуковых извещений о посягательстве, выдаваемых системой не менее 2с.
3. Управление системой должно осуществляться:
включение с помощью клавиатуры в салоне автомобиля, дистанционно с пульта управления;
отключение дистанционно с расстояния не менее 0,01 м при помощи кодированного радиоизлучения и клавиатуры в салоне;
включение режима Anti-Hi-Jack с клавиатуры в салоне автомобиля, дистанционно с кодового брелка;
с пульта управления включается также режим «Паника» (включаются звуковое и световое оповещение, блокируется зажигание).
4. Защищённость системы.
элементы и устройства системы, также соединяющая их проводка должны располагаться так, чтобы исключалась возможность повреждения их снаружи автомобиля;
должна быть обеспечена возможность нейтрализации систем из салона автомобиля не предусмотренным способом;
должна быть исключена возможность установления кода устройств путем визуального наблюдения;
в системе не должны применяться способы активного вредного воздействия на человека.
5. Бортовая цепь питания системы должна быть защищена предохранителем.
7. В системе должна быть реализована противоугонная функция по цепи зажигания и путем блокировки дверей.
Эксплуатационные свойства.
1. Конструкция отдельных устройств должна предусматривать максимально возможное штатное размещение в автомобиле.
2. При монтаже устройств должно предусматриваться минимальное количество слесарных работ.
3. В качестве датчиков открывания должны использоваться:
для дверей — штатные автомобильные дверные выключатели;
для багажника, капота и других узлов и деталей — специальные выключатели, конструкция которых должна обеспечивать простоту регулировки на срабатывание.
4. Все электрические соединения устройств системы между собой и присоединения их к электрической цепи автомобиля должны производиться без применения паек с помощью штекерных разъемов или крепежных изделий.
5. Бортовые устройства системы должны питаться от аккумулятора автомобиля напряжением 12 В с минусом на массе.
6. Носимые устройства системы должны питаться от гальванического элемента с суммарной э.д.с. не менее 4.5 В с минусом на массе.
7. Температурный диапазон работы –25…+55°С.
8. Срабатывание сигнализации и выдача сигнала о тревоге в линию передачи при нарушении любых блокировок, при механическом воздействии и при проникновении в салон должно происходить без задержек.
8. В системе должна быть предусмотрена индикация режима охраны, включенного состояния или индикация перехода системы из одного состояния в другое.
Требования к приемо-передающим устройствам системы.
1. В системе должна быть применена система кодирования радиосигнала, обеспечивающая не менее 106 возможных комбинаций индивидуальных номеров.
2. Входящие в систему радиомодули должны соответствовать Временному Европейскому Стандарту Телекоммуникаций (I–ETS 300 220) для класса 1а:
несущая частота 433,92 МГц;
чувствительность 0,5 мкВ при отношении сигнал/шум 20дБ;
максимальная эффективная излучаемая мощность 10 мВт;
уровень внеполосных излучений передатчика 4 нВт.
При дальнейшем проектировании необходимо руководствоваться техническими требованиями и характеристиками, предъявляемыми к системе.
3.РАЗРАБОТКА АРХИТЕКТУРЫ
3.1 Разработка структурной схемы
В результате анализа существующих технических решений и приняв во внимание выдвинутые требования к проектируемой системе была разработана структурная электрическая схема (рис.3.1)
Структурная электрическая схема состоит из двух подсистем: подсистема, устанавливаемая на охраняемом автомобиле (рис.3.1а), и подсистема, находящаяся у пользователя (рис.3.1б).
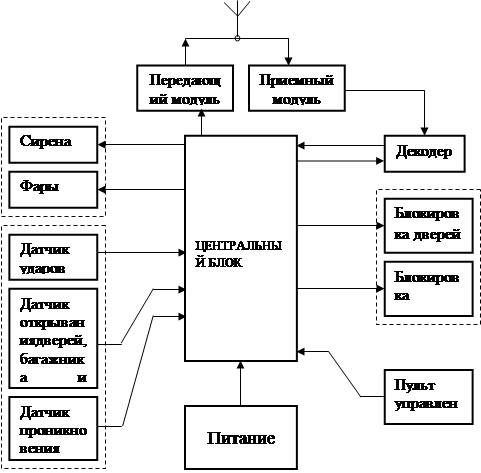
Рис.3.1а. Структурная схема бортовой подсистемы.
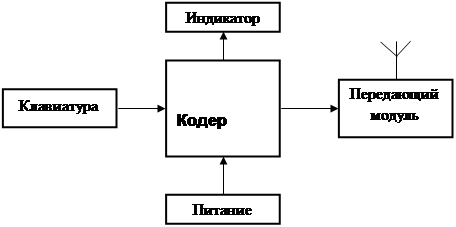
Рис.3.1б. Структурная схема подсистемы носимой.
Первая подсистема содержит центральный блок, датчики открывания дверей, ультразвуковой датчик движения, датчик ударов, сирену, приемник, передатчик, антенну, пульт управления, дешифратор динамического кода. Центральный блок контролирует работу периферийных устройств. На него постоянно поступает информация о состоянии датчиков открывания дверей, датчика ударов, датчика проникновения. Режим работы центрального блока можно задавать пультом управления, находящимся в салоне автомобиля или дистанционно, принятием радиосигналов с подсистемы пользователя с использованием радиоприёмного устройства. По желанию пользователя охранная система производит блокировку дверей и системы зажигания. В случае проникновения или по желанию пользователя центральный блок управляет сигналами сирены и габаритными огнями автомобиля, а так же управляет выводом информации через радиоканал с помощью передатчика. Питание подсистемы автомобиля производится от бортовой сети автомобиля. Подача сигналов тревоги осуществляется с помощью сирены, миганием габаритных огней и через радиопередающее устройство. Радиоприёмное и радиопередающее устройство работают на одну антенну.
Вторая подсистема (пользователя) с помощью устройства управления осуществляет связь с аппаратурой автомобиля через радиопередающее устройство с использованием клавиатуры. Питание данной подсистемы производится от портативного источника.
Две подсистемы, объединенные с использованием радиоканала, образуют радиосистему автономной охранной сигнализации автомобиля.
При работе шифратора и дешифратора динамического кода должна осуществляться их синхронизация. Она происходит следующим образом. На стадии разработки в кодер заносится информация: серийный номер передатчика, код производителя. На основе этих данных по некоторому алгоритму вычисляется ключ шифрования. Чтобы шифратор и дешифратор могли работать вместе, дешифратор должен сначала узнать и сохранить следующую информацию из шифратора в защищенной EEPROM:
- серийный номер передатчика;
- ключ шифрования;
- текущее значение счетчика синхронизации;
- код производителя.
Всего в дешифраторе семь слотов памяти, поэтому он может запомнить семь шифраторов.
Схема формирования кода в шифраторе показана на рис.3.2.
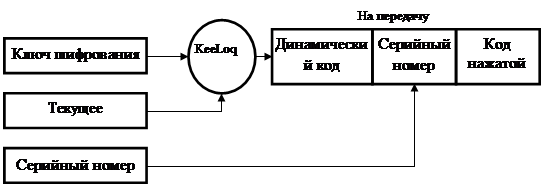
Рис.3.2. Схема формирования кода в шифраторе.
Схема процесса дешифрации показана на Рис.3.3.
При приеме дешифратором кода вначале производится проверка на соответствие серийного номера шифратора. Если хоть в одном слоте памяти хранится принятый серийный номер, то шифратор считается опознанным. Дальше используя полученный динамический код и ключ шифрования, сохраненный в слоте памяти, вычисляется переданное синхрочисло. Затем оно сравнивается с сохраненным в памяти синхрочислом.
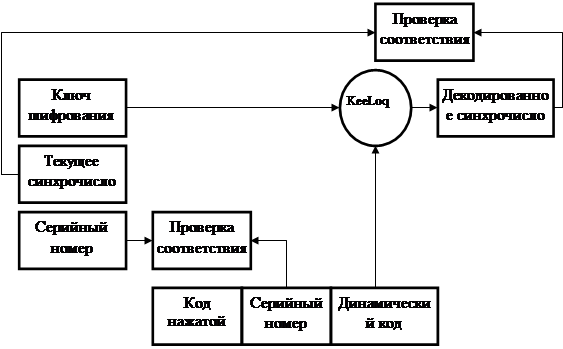
Рис.3.3. Схема процесса дешифрации.
Далее возможны следующие варианты:
- Если полученное декодированное синхрочисло попадает в текущее окно кодов 1 (рис.3.4.), то оно сохраняется и команда выполняется;
- Если полученное декодированное синхрочисло вышло за предел текущего окна кодов 1, но внутри блока открытых кодов 2, то оно временно сохраняется и декодер ждет следующего синхрочисла. Если две величины последовательны, то принимается, что счетчик синхронизации шифратора только что вышел из текущего окна кодов 1, но теперь снова там и новое синхрочисло (второе) сохраняется и выполняется команда;
- Если шифратор каким-то образом вышел из блока открытых кодов 2, то его надо перезапомнить.
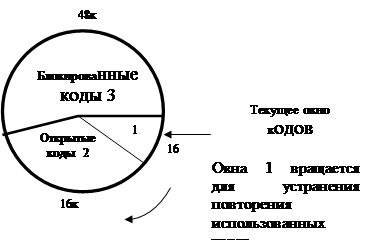
Рис.3.4. Окно кодов.
3.2 Форматы сообщений
В режиме «Тревога» радиопередающее устройство аппаратуры автомобиля излучает периодическую последовательность, содержащую четыре байта адреса (два байта для идентификации цифрового регистрационного номера машины в двоично-десятичном коде и по одному байту на каждую из двух букв в номере машины) и байт проверочного слова (двоичная сумма байтов адреса и байта состояния по модулю 256). Каждый байт начинается стартовым битом и заканчивается стоп–битом. Таким образом, длина сообщения составляет 50 бит информации.
При передаче ключа для выезда/въезда на охраняемую автостоянку передаваемая последовательность содержит три байта личного кода автомобиля и один проверочный байт (двоичная сумма байтов личного кода по модулю 256). Каждый байт также начинается стартовым битом и заканчивается стоп-битом. Таким образом, длина сообщения составляет 40 бит информации.
Для снятия/постановки на охрану, включения режима «Anti-Hi-Jack» и режима «Паника» с носимой подсистемы передается кодовая последовательность.

Рис.3.5. Формат кодовой посылки
Так как в разрабатываемой системе применяется технология динамического кодирования, основанная на использовании специализированных кодера и декодера HCS300 и HCS500 фирмы Microchip, то формат передаваемого сообщения будет определятся данными микросхемами. Структура кодовой посылки изображена на рис.3.5.
Кодовая посылка начинается передачей преамбулы, состоящей из 12 импульсов длительностью 9,2 мс. Далее следует заголовок длительностью 4 мс в котором импульсов нет. Затем передается кодированная часть сообщения, состоящая из 32 бит, длительностью 38,4 мс и фиксированная часть сообщения, состоящая из 34 бит, длительностью 40,8 мс. Завершает кодовую посылку защитный промежуток длительностью 15,6 мс. В результате длительность всей кодовой посылки составляет 108 мс.
Формат передаваемого сообщения показан на рис.3.6.
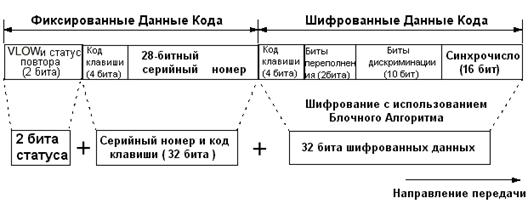
Рис.3.6. Формат сообщения.
Сообщение состоит из фиксированных данных и шифрованных данных. Фиксированные данные состоят в свою очередь из бита снижения напряжения питания брелка, бита статуса повтора, 4-битного кода клавиши и 28-битного серийного номера. Шифрованные данные несут информацию о коде клавиши (4 бита), о переполнении счетчика синхронизации (2 бита), о дискриминационной величине (10 бит) и текущем значении счетчика синхронизации (16 бит). Эти данные получаются в результате действия алгоритма шифрования KEELOQ.
3.3 Протокол обмена
Передающий радиомодуль может передавать цифровую информацию с максимальной частотой 4800 бит/сек. Максимальная, входящая в эту границу, скорость передачи последовательного асинхронного передатчика на PIC16С73А составляет 2400 бит/сек., следовательно, возьмем скорость передачи информации равную 2400 бит/сек.
При подаче тревожного сигнала выход в эфир осуществляется с учётом анализа наличия несущей в эфире. После освобождения эфира в течение времени передачи одного байта (при скорости передачи информации 2400 бит/сек.) могут начинать выходить в эфир сообщения с автомобилей о тревоге (рис.3.7).
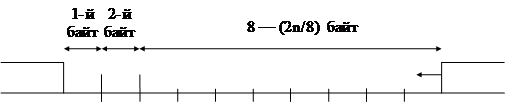
Рис.3.7. Анализ несущей в эфире.
При их отсутствии в течение следующего байта могут начинать выходить в эфир информационные посылки с подсистем пользователя (пультов управления). Если в течение этих двух байтов в эфир никто не выходил, то через восемь байтов начинается контрольная посылка от очередного автомобиля. В противоположном случае (наличие начала сообщения в течение одного из двух контрольных байтов или следующих восьми байтов) алгоритм начинается заново после окончания сообщения, но контрольная посылка при этом выйдет уже через семь байтов и шесть бит, т. е. сдвинется влево на два бита. Это необходимо для приоритетного занятия очереди выхода в эфир, т. к. в данный момент должна была выйти в эфир информация от следующей машины.
Таким образом, сдвигая очередные информационные посылки от автомобилей на 2n битов влево (где n – число раз занятого эфира) в системе сохраняется очерёдность опроса автомобилей. Очевидно, что число невыходов в эфир не может быть больше 32-х раз.
3.4 Расчёт системных показателей
Так как в разрабатываемой системе применяется кодирование ключа, то представляет интерес такой параметр, как его стойкость.
Если предположить, что злоумышленник знает форматы сообщений, но не знает кода для снятия автомобиля с охраны, то ему придётся перебирать код. В передаваемом коде из 66 бит 34 бита фиксированные и их можно узнать с помощью граббера. 32 бита изменяются с каждой новой посылкой. Количество всех комбинаций для бинарного ключа при длине 32 бита определяется выражением
N2 = 232 = 4294967296 комбинаций. (3.1)
При этом стойкость шифра можно определить по формуле
WШ = N2х(Т/2), сек, (3.2)
где Т — время на одну операцию подбора кода.
В нашем случае время на одну операцию подбора кода определяется временем передачи одной кодовой посылки. Как было рассмотрено выше, она составляет 108 мс. Тогда время на подбор кода определяется
WШ = 4294967296х[108х 10-3)/2] = 231928234 сек, (3.3)
или с 2684 суток.
Так как данной системой предполагается оснастить большое число автомобилей, то важным параметром будет являться вероятность сбоя при передаче кодовой посылки для снятия и постановки на охрану автомобилей.
Рассмотрим наихудший вариант – снятие и постановка на охрану автомобилей, находящихся на большой городской автостоянке при условии, что все автомобили оснащены разрабатываемой системой охраны.
Возьмем размеры стоянки 600х600 метров. Стандартное место стоянки одного автомобиля имеет размеры 3х6 метров. При расположении автомобилей на стоянке, как показано на рис.3.8., на площади стоянки может разместиться (600´2)/3+(32´2´600)/3= 14800 автомобилей.
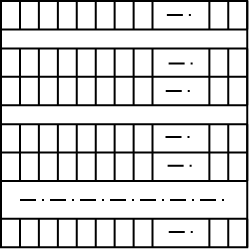
Рис.3.8. План автостоянки.
При этом плотность автомобилей, приходящихся на 1 м2 n=14800/360000=0,041шт/м2 . Так как радиус действия передатчика кодового брелка равен 50 метров, то в окружности этого радиуса окажется p´502´0,041=322 автомобиля. Интенсивность пользования кодовым брелком на автостоянке для одного владельца автомобиля λ1 за сутки составляет в среднем около 10 раз. Интенсивность появления кодовых посылок на автостоянке в радиусе 50 м – за сутки составляет λΣ=322´10=3220 раз. Так как появление кодовых посылок случайно, то для вычисления вероятностных характеристик можно воспользоваться формулой Пуассона:
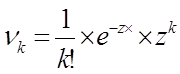 (3.4)
(3.4)
В нашем случае можно посчитать вероятность не появления ни одной посылки за время передачи Δt:
![]() , (3.5)
, (3.5)
где z – среднее число излучений на интервале передачи кодовой посылки:
 (3.6)
(3.6)
Подставим это значение в формулу (3.5) и получим значение вероятности равное 0,99598.
На рис.3.9. приведены графики зависимости ν0 от числа автомобилей в радиусе действия кодового брелка при фиксированных значениях λ1, равных 5, 10, 50 и 100 соответственно. На рис.3.10. приведены графики зависимости ν0 от средней интенсивности пользования кодовым брелком λ1, при фиксированных значениях числа автомобилей в радиусе действия кодового брелка, равных соответственно 10, 100, 200, 322, 400.
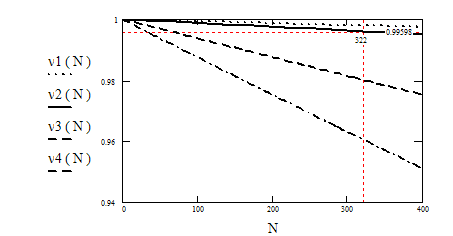
Рис.3.9.Графики зависимостей ν0 от N.
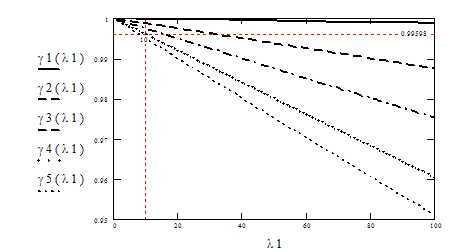
Рис.3.10. Графики зависимостей ν0 от λ1.
4. РАЗРАБОТКА ПРИНЦИПИАЛЬНЫХ ЭЛЕКТРИЧЕСКИХ СХЕМ
4.1 Выбор микроконтроллера
В проектируемой системе разработке подлежит две подсистемы. Для повышения технико-экономических показателей (стоимости, надёжности, потребляемой мощности, габаритных размеров) и придания изделию таких потребительских качеств как расширенные функциональные возможности, модифицируемость, адаптивность бортовая подсистема строится на базе микроконтроллера.
В настоящее время существует множество фирм, выпускающих широкий ассортимент микроконтроллеров, такие как Motorola, Microchip, SGS–Thompson, National, ALCATEC. Они различаются электрическими характеристиками и насыщенностью периферийными устройствами. Хорошо зарекомендовала себя в плане быстродействия, экономичности, простоты схемы разрабатываемого устройства из-за обширного набора периферийного оборудования продукция фирмы Microchip.
В таблице 4.1 приведены параметры PIC-контроллеров фирмы Microchip. В управляющем микроконтроллере должны присутствовать асинхронный передатчик (для вывода информации в передающий радиомодуль), порт с интерфейсом I2C, как минимум два внешних входа прерываний (для детектора несущей и датчика ударов) и достаточное количество портов ввода/вывода. Особые требования предъявляются к потребляемой мощности и стабильности работы. Данными свойствами обладает PIC- контроллер PIC16C73A.
Данный микроконтроллер построен по RISC архитектуре. Набор его команд содержит всего 35 простых команд, которые выполняются за один машинный цикл, кроме команд пересылки. Этот микроконтроллер выгодно отличается низкой ценой и высокой производительностью. Важным достоинством является малое энергопотребление (2 мА на частоте 4 МГц и 5 В питании и менее 1 мкА в режиме SLEEP) и широкие диапазоны напряжения питания (2,5-6В) и тактовой частоты (до 20 МГц).
Структурная схема PIC16С73А изображена на рис. 4.1. В состав выбранного PIC-контроллера входят следующие элементы: 4К´14 память программ с защитой кода от считывания, 192´8 память данных, два 8-битных и один 16-битный таймера/счетчика с предделителями, сторожевой таймер, два 8-битных и один 6-битный многофункциональных порта ввода/вывода с большой
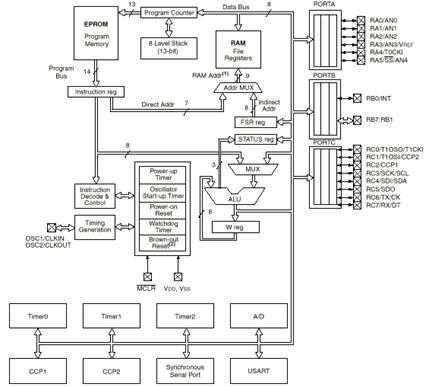 |
Рис 4.1. Структурная схема PIC16С73А.
нагрузочной способностью (выходной ток до 25 мА), синхронно/асинхронный последовательный приемопередатчик, последовательный порт с интерфейсом I2C, 11 источников прерываний, 8-уровневый аппаратный стек, встроенный RC-генератор.
Микроконтроллер выполнен на основе высокоуровневой КМОП технологии и выпускается в SDIP керамическом корпусе, имеющем 28 внешних выводов. Для работы PIC- контроллера требуется один источник электропитания +2,5…6 В. Выходные логические уровни соответствуют уровням ТТЛ-схем.
Цоколёвка корпуса и назначение выводов показаны на рис.4.2.
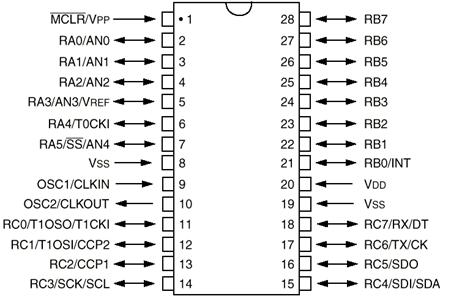 |
Рис 4.2. Цоколевка и назначение выводов PIC16С73А.
В кристалле PIC16С73А имеется встроенный детектор питания. При достижении на входе VDD напряжения 1,5-2,1В запускается таймер включения питания PWRT, который функционирует на внутреннем RC-генераторе. По истечении выдержки около 72 мс считается, что напряжение достигло номинала и запускается другой таймер-выдержка на стабилизацию частоты кварцевого генератора. Таймер на стабилизацию генератора отсчитывает 1024 импульса от начавшего работу генератора. Считается, что кварцевый генератор за это время вышел на режим. При использовании RC генераторов - выдержка на стабилизацию не производится.
Опорную частоту синхронизации определяет кварцевый резонатор РГ–05 с типом корпуса М, добротностью 2000х103, статической ёмкостью менее 9пФ, допустимым отклонением рабочей частоты ±10х10–6. Кварцевый резонатор имеет гибкий тип выводов, предназначенный для соединений пайкой, миниатюрный плоский корпус, хорошо компонуется в современной аппаратуре. Он подключается к выводам OSC1 и OSC2 (рис.4.3). По рекомендации изготовителей микроконтроллера конденсаторы: КД–1 ёмкостью 15 пФ каждый.
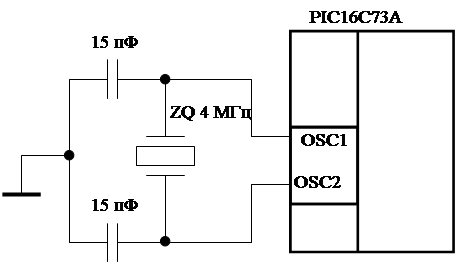
Рис.4.3. Схема синхронизации PIC16С73А.
Далее разработаем принципиальные схемы (см. чертёж схемы электрической принципиальной) для конкретных блоков проектируемой системы.
4.2 Бортовая подсистема
Первым шагом при проектировании принципиальной схемы является распределение аппаратных ресурсов микроконтроллера. Необходимо определится с подключением периферийных устройств к микроконтроллеру. Бортовая подсистема в режиме охраны должна постоянно анализировать состояние датчиков. В проектируемой системе предусматривается три датчика (датчик открывания дверей, ультразвуковой датчик движения и датчик ударов), поэтому подключим их к портам, которые вызывают прерывание при изменении логического состояния на их входе, а именно к портам RB5, RB6, RB7 соответственно.
Датчики открывания дверей подключим непосредственно к порту RB5 через резистор R1 сопротивлением 10 кОм, который защитит порт от сгорания при случайном попадании на него напряжения 12В. Высокий потенциал наведем источником +5В через резистор R2 сопротивлением 3 кОм. При срабатывании датчиков открывания дверей на порт будет подаваться логический ноль.
Если дверные выключатели соединены с лампой плафона, их следует отделить от входа диодами VD1-VD6. Диоды необходимы для того, чтобы напряжение питания через лампу плафона не проходило на вход порта — это недопустимо. Для этих целей выберем импульсные диоды КД 522Б [38]. Импульсный прямой ток диода составляет 1,5А, средний прямой ток —100 мА, постоянное прямое напряжение — 1,1В.
Рассеиваемая мощность резистора R1 определяется исходя из падения напряжения на нем по формуле:
Р1 = U2/R = (12-5) 2/10000 = 0,0007 Вт (4.1)
В качестве резистора R1 выберем С2-33–0,125–10кОм–±10%.
Рассеиваемая мощность резистора R2 определяется исходя из протекающего по нему току по формуле:
P2 = U2/R = 52/3000 = 0,008 Вт (4.2)
В качестве резистора R2 выберем С2-33–0,125–3кОм–±10%.
Ультразвуковой датчик движения и датчик ударов можно подключать к PIC-контроллеру непосредственно, так как они имеют соответствующие логические уровни.
Для работы микроконтроллера и других устройств требуется источник электропитания +5В. Питание бортовой системы будем производить непосредственно от бортовой сети автомобиля + 12 В через спрятанный в салоне автомобиля потайной тумблер–переключатель ПКН41–1–2 и предохранитель плавкий 10А. Напряжение бортовой сети автомобиля понизим с помощью интегрального стабилизатора КР142ЕН5.
Так как в разрабатываемой системе будет использоваться технология кодирования с динамическим кодом, то в состав бортовой подсистемы будет входить дешифратор динамического кода HCS500 фирмы Microchip. Структурная схема HCS500 показана на рис.4.4. Цоколевка корпуса и назначение выводов показаны на рис.4.5.
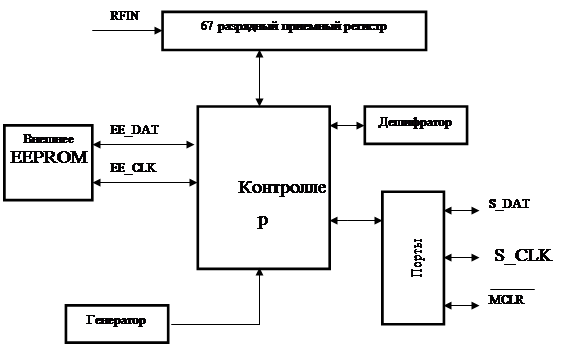
Рис.4.4. Структурная схема HCS500.
Данная микросхема осуществляет прием кодовой посылки непосредственно с цифрового приемного радиомодуля, декодирует ее, осуществляет проверку подлинности и выдает управляющую информацию на микроконтроллер по последовательному порту с интерфейсом I2C.
HCS500 имеет следующие электрические характеристики: напряжение питания - 3,0…5,5В, максимальный выходной ток – 25 мА.
Для работы дешифратора требуется микросхема внешней энергонезависимой памяти 24LC02, объемом 2К и с последовательным интерфейсом I2C.
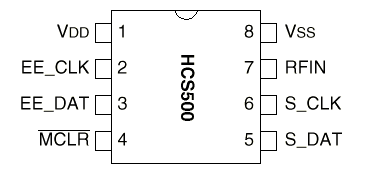
Рис.4.5. Цоколевка корпуса и назначение выводов микросхемы HCS500.
Схема подключения памяти к HCS500 показана на рис.4.6.
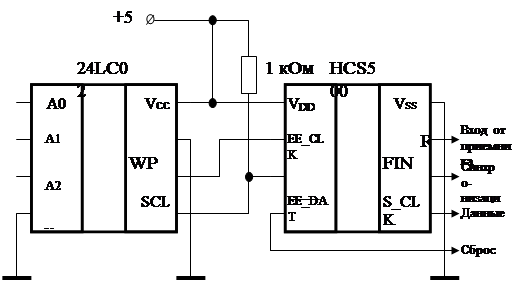
Рис.4.6. Схема подключение внешней памяти к дешифратору динамического кода.
К микроконтроллеру дешифратор подключается через порты SCK и SDA имеющие встроенный интерфейс I2C. Вход RFIN дешифратора напрямую подключается к выходу RX приемного радиомодуля.
В настоящее время для разработке аппаратуры передачи цифровой информации предлагается несколько разновидностей радиомодулей. Они различаются по функциональному назначению (приемники, передатчики, приемопередатчики), по типу модуляции (АМ, ЧМ), по скорости передачи цифровых данных (от 1000 до 20000 бит/с), по радиусу действия (от 30 до 800 м). Для передачи цифровой информации на внешние подсистемы применим радиомодуль CDP–TX–01 с ЧМ модуляцией и радиусом действия 800 м. Так как для связи между кодовым брелком и бортовой подсистемой будет применятся радиоканал с АМ модуляцией и не требуется большого радиуса действия и скорости передачи, то в качестве приемного радиомодуля применим радиомодуль BC-BNK. Основные характеристики данных радиомодулей были приведены в обзоре аналогичных технических решений (табл. 1.1).
Для фильтрации напряжения питания и развязки напряжение +5 В предварительно пропустим через LC– цепочку. В качестве индуктивности L1 применим дроссель ДМП 01–150мкГн, а конденсатор С3 — К73–16 ёмкостью 47нФ. Аналогичную фильтрующую цепь применим и при подаче питания на приёмник. Радиомодули работают на одну свои антенны WA1 и WA2.
Передатчик должен использоваться только в ограниченные моменты времени, поэтому следует коммутировать питание. Во время пауз между передачами передатчик рекомендуется выключать. Так как потребляемый ток передающего радиомодуля равен 18 мА, то питание на него можно подавать непосредственно с порта RC7 PIC-контроллера.
Так как приёмник бортовой подсистемы должен использоваться для постоянного анализа эфира и приёма посылок с носимого пульта управления, то фильтрующую цепь приёмника присоединим непосредственно к + 5В. Детектирование несущей в эфире осуществим с использованием порта RB0. Приём цифровой информации будет осуществляться непосредственно дешифратором динамического кода HCS500, который имеет соответствующий для этого вход.
Для коммутации тока через звуковое оповещательное устройство (сирену), реле блокировки/разблокировки дверей и системы зажигания, габаритные огни будем применять полевые кремниевые транзисторы КП922А [35].
Применение полевых транзисторов в качестве ключей вызвано их явными преимуществами перед биполярными. Во-первых, управляются полевые транзисторы напряжением и для включения ключа требуется маленький ток, что позволяет управлять ими непосредственно портами PIC-контроллера. Во-вторых, сопротивление исток-сток открытого полевого транзистора составляет доли ома и даже при больших протекающих токах падение напряжения на них незначительно, в отличии от биполярных транзисторов, в которых напряжение на p-n переходах падает до 1 В.
Выбранные транзисторы предназначены для применения в ключевых преобразователях напряжения, переключателях и импульсных устройств. Предельный постоянный ток стока составляет 10А, что достаточно для работы с выше перечисленными устройствами. Так как выходной ток портов PIC-контроллера составляет 25 мА, то прямое подключение к портам обеспечит необходимые режимы работы полевых транзисторов VT1-VT5. Малое сопротивление сток–исток в открытом состоянии (0,2 Ом) даже при больших токах нагрузки обеспечит малое падение напряжения на самом транзисторе. Защиту от пробоя транзисторов VT2-VT5 произведем с использованием импульсных диодов VD7 – VD10. В качестве последних (VD7 – VD10) можно применить диоды типа КД412Г [38] со средним прямым током 10 А.
В качестве звукового сигнализатора применим пьезокерамический излучатель СП–1. Обладая весьма малыми габаритами и сравнительно большой громкостью (уровень звукового давления достигает 100дБ) дает лучшие результаты по сравнению с динамическими головками.
Для индикации режимов работы бортовой подсистемы будет использоваться светоизлучающий диод АЛ102Г красного света свечения с силой света не менее 200 мккд [37]. Для ограничения тока через светодиод, последовательно с ним включим резистор R3. При постоянном прямом напряжении на светодиоде 2,8 В, прямом токе 10 мА сопротивление резистора:
R3 = (5–2,8)/0,01= 220 Ом. (4.4)
Рассеиваемая мощность резистора определяется исходя из тока, протекаемого через него формуле:
P3= RI2 = 220х0,012 = 0,022 Вт. (4.5)
В качестве резистора R3 выберем С2-33–0,125–220Ом–±10%.
Перечень элементов бортовой подсистемы сведён в приложении 1. Схема электрическая принципиальная бортовой подсистемы приведена в приложении 3.
4.3 Носимая подсистема
Носимая подсистема базируется на шифраторе динамического кода HCS300 фирмы Microchip. Структурная схема HCS300 приведена на рис.4.7. Цоколевка корпуса и назначение выводов показано на рис.4.8.
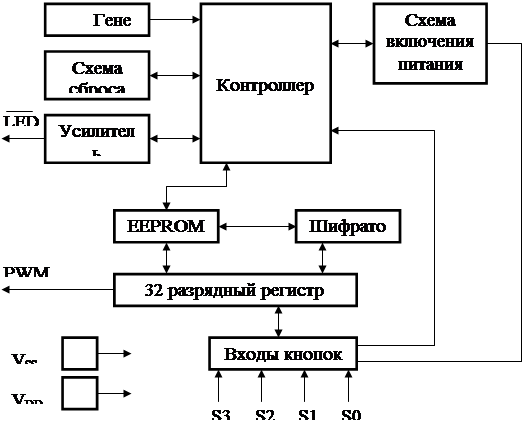
Рис.4.7. Структурная схема HCS300.
Данная микросхема осуществляет съем информации с клавиатуры, подключаемой ко входам S0, S1, S2, кодирование динамическим кодом, выдачу информации через асинхронный последовательный порт PWM, световую сигнализацию режима передачи кода светодиодом, подключенным к выходу LED.
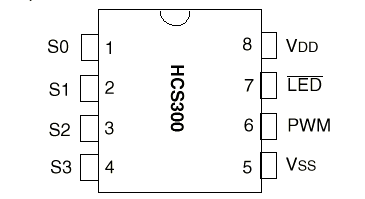
Рис.4.8. Цоколевка корпуса и назначение выводов HCS300.
Микросхема питается от источника напряжения 2,0…6,3В. Она автоматически входит в режим SLEEP и автоматически выходит из него при нажатии хоть одной клавиши.
В процессе проектирования в HCS300 заносится следующая информация, которая хранится во встроенной энергонезависимой памяти:
- Ключ шифрования (64 бита);
- Текущее значение счетчика синхронизации (16 бит);
- Серийный номер (28 бит)
- Установка скорости передачи.
Данная информация не может быть потом считана, ее можно только перезаписать.
Передача информации в радиоканал осуществляется с помощью передающего радиомодуля TX-SAW-I.A со встроенной антенной. Фильтрация и развязка питания, подаваемого на радиомодуль, такая же как в бортовой подсистеме автомобиля.
Управление питанием передающего радиомодуля осуществляется с помощью электронного ключа, выполненного на полевом транзисторе. Передатчик необходимо включать только во время передачи кодовой посылки. Напряжение, необходимое для срабатывания ключа будем снимать выхода для подключения светодиода, потому что при нажатии любой кнопки на выходе LED будет логический ноль. Так как электронный ключ должен срабатывать от логического нуля, то в качестве коммутирующего элемента надо брать полевой транзистор с индуцированным каналом р-типа. Для этой цели подходит транзистор КП301Б. На его сток подадим напряжение питания +5В. К истоку подключим передающий радиомодуль. При подаче на затвор транзистора логического нуля с выхода LED сопротивление исток-сток упадет до 6 Ом. Следовательно, при потребляемом передатчиком токе 4 мА падение напряжения на нашем коммутирующем элементе, включённом последовательно в цепи питания, составит не более 0,02 В.
В качестве светодиода HL применим светоизлучающий диод АЛ102Г желтого цвета свечения с силой света не менее 200 мккд [37]. Он включается непосредственно между выводами VDD и LED шифратора HCS300.
Питание всей носимой подсистемы пользователя осуществляется от портативного источника питания с суммарной ЭДС +5 В. Так как в режиме ожидания основной потребитель энергии – шифратор (передающий радиомодуль практически ничего не потребляет потому что сопротивление закрытого транзистора очень велико), а он автоматически переводится в режим пониженного энергопотребления и потребляет ток менее 1 мкА, поэтому механический выключатель питания использоваться не будет.
Отметим, что благодаря миниатюрному исполнению радиодеталей, используемых в носимой подсистеме пользователя, можно при удачной компоновке обеспечить минимизацию габаритов данного изделия.
5. РАЗРАБОТКА УПРАВЛЯЮЩЕЙ ПРОГРАММЫ
5.1 Разработка схемы алгоритма управляющей программы
Одним из этапов получения текста исходной программы является разработка общей схемы алгоритма (СА) работы микроконтроллера. На языке алгоритмов надо описать метод, выбранный для решения поставленной задачи. Способ решения задачи, выбранный на этапе её инженерной интерпретации, на основе которого формируется СА, определяет не только качество разрабатываемой прикладной программы, но и качественные показатели конечного изделия. В основу разработки СА положена та же самая процедура модульного проектирования, которая традиционно используется разработчиками аппаратурных средств.
СА работы состоит из следующих элементов: “Начало”, Инициализация”, “Проверка слова состояния (СС)”. В зависимости от слова состояния (СС) программа переходит в один из трех режимов работы. Так при СС=1 активизируется режим «Охрана», при СС=2 – режим «Тревога», при СС=3 – режим «Ожидание». Схема алгоритма работы представлена на рис.5.1.
Инициализация заключается в выборе режимов работы отдельных элементов структуры PIC-контроллера и в установке необходимых регистров.
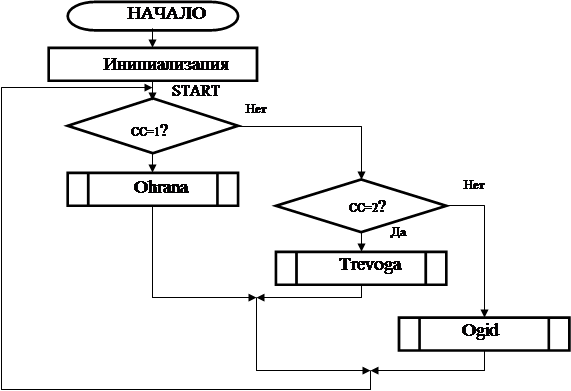
Рис.5.1. Схема алгоритма работы управляющей программы.
Рассмотрим подробнее алгоритмы работы системы в каждом из трех режимов. Схема алгоритма подпрограммы режима «Охрана» представлена на рис.5.2.
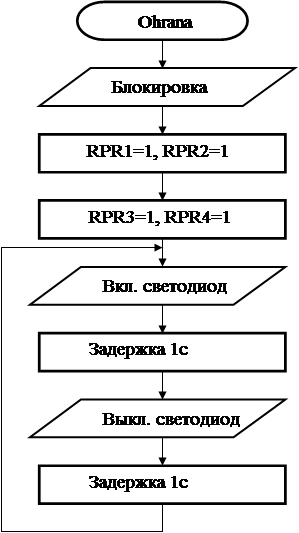
Рис.5.2. Схема алгоритма режима «Охрана».
Для удобства описания введем следующие логические переменные RPR1, RPR2, RPR3, RPR4, RPRTMR1. Они будут показывать разрешены или запрещены ли прерывания от датчиков дверей, УЛЗ датчика, датчика ударов, детектора правильного кода и от таймера соответственно.
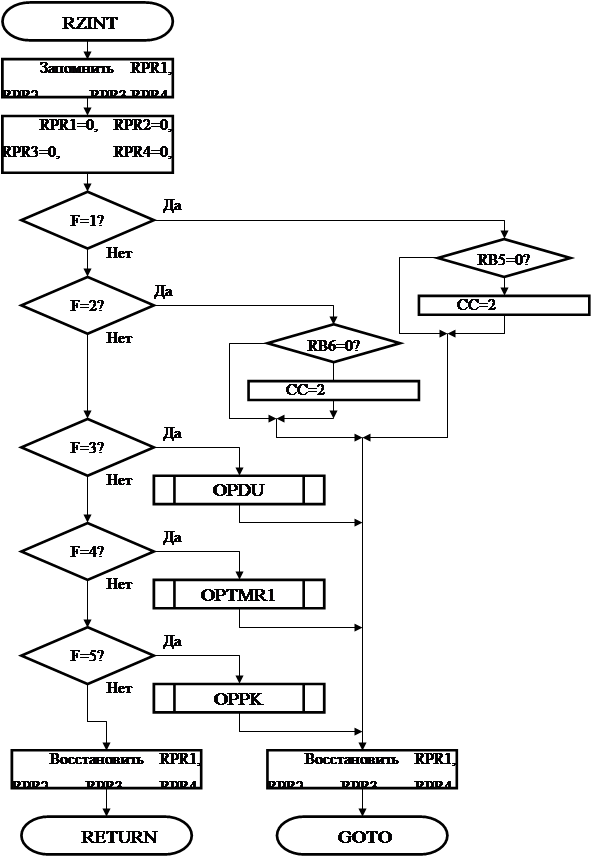
Рис.5.3. Схема алгоритма RZINT.
Если они будут равны «1», то прерывания разрешены, если «0», то прерывания запрещены. Сначала режима «Охрана» блокируется зажигание выдачей на порт RA1 логической единицы. Далее разрешаются прерывания от всех датчиков и от детектора правильного кода и программа переходит в режим ожидания прерываний, выдавая с периодом 1с сигналы включения и выключения светодиода. При наличии какого либо из разрешенных прерываний, программа переходит к подпрограмме определения источника и приоритета прерываний RZINT, структурная схема алгоритма которой показана на рис.5.3.
Введем логический флажок F, который будет указывать источник прерывания. Если F=1, то прерывание вызвано изменением состояния датчика открывания дверей; если F=2, то изменением состояния УЛЗ датчика; если F=3, то изменением состояния датчика ударов; если F=4, то источник прерывания- таймер; если F=5, то источник – детектор правильного кода. Начинается подпрограмма RZINT с запоминания переменных RPR1, RPR2, RPR3, RPR4, RPRTMR1. Затем запрещаются все прерывания. Далее следует проверка источника прерывания. Очередность проверок определяет приоритеты прерываний. В нашем случае она следующая: от датчика открытия дверей, от УЛЗ датчика, от датчика ударов, от таймера и наконец от детектора правильного кода.
Обработка прерывания от датчика открытия дверей происходит следующим образом. Проверяется состояние порта RB5, к которому подключены соответствующие датчики. Если на порте присутствует логический ноль, то принимается решение о наличии посягательства на автомобиль, при этом слову состояния присваивается значение 2, что соответствует режиму «Тревога» и после восстановления переменных RPR1, RPR2, RPR3, RPR4, RPRTMR1 управление передается головной программе к метке START.
Обработка прерывания от УЛЗ датчика происходит по такому же алгоритму.
При возникновении прерывания от датчика ударов выдается короткий звуковой сигнал сиреной. Затем счетчик ударов SU уменьшается на единицу и производится проверка: равен ли счетчик ударов нулю. Изначально счетчик ударов SU равен 2. Если SU не равен 0, то запускается подпрограмма задержки на 3 секунды. После этого SU опять присваивается значение 2 и происходит выход из подпрограммы. Если за эти 3 секунды опять произошло прерывание, то счетчик ударов будет равняться нулю после очередного уменьшения на единицу. Это приведет к тому, что система интерпретирует эти два срабатывания датчика ударов в течении 5 секунд как посягательство, слову состояния присвоится значение 2, и произойдет выход к метке START. Схема алгоритма подпрограммы обработки прерывания от датчика ударов OPDU приведена на рис.5.4.
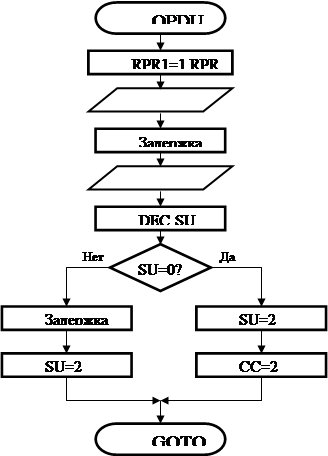
Рис.5.4. Схема алгоритма обработки прерывания от датчика ударов.
При появлении напряжения высокого уровня на порте RB0, происходит прерывание и управление передается подпрограмме обработки прерывания от детектора правильного кода OPPK, схема алгоритма которой изображена на рис.5.5.
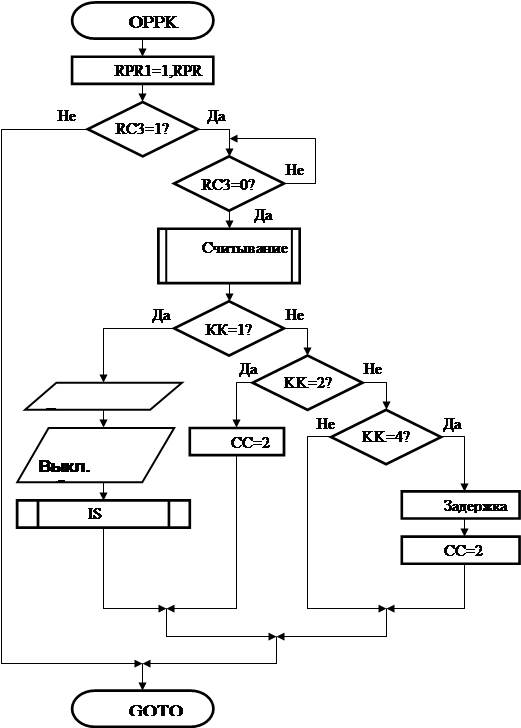
Рис.5.5. Схема алгоритма обработки прерывания от детектора правильного кода.
Подпрограмма работает следующим образом. После приема правильной кодовой посылки, дешифратор посылает на порт RC3 в течение 500 мс логическую единицу. Начинается OPPK с разрешения прерываний от датчиков дверей и от УЛЗ датчика, затем производится проверка состояния порта RC3. Если на нем присутствует напряжение низкого уровня, то происходит выход из подпрограммы, если высокого уровня – то принимается решение о приеме дешифратором правильной кодовой посылки. После этого происходит ожидание окончания передачи дешифратором «единицы» и можно перейти к считыванию кода клавиши. Код клавиши помещается в регистр с именем КК. Далее производиться идентификация кода клавиши.
Если КК=1, то считается, что пришел код от клавиши «Постановка/снятие». При этом происходит выключение сирены и мигания габаритных огней и переход к подпрограмме проверки и изменения состояния IS. Если КК=2, то считается, что пришел код от клавиши «Паника». При этом слову состояния присваивается значение 2, соответствующее режиму «Тревога» и происходит выход из подпрограммы.
Если КК=4, то считается, что пришел код от клавиши «AHJ». При этом запускается подпрограмма задержки на 20 секунд, затем слову состояния присваивается значение 2 и происходит выход из подпрограммы к метке START.
Подпрограмма IS начинается с проверки слова состояния. Если СС=3, то это значит, что система находилась в режиме «Ожидание» и производится выдача сигнала на закрытие центральному замку (ЦЗ), подача двух коротких сигналов сиреной, отключение сигнала закрытия ЦЗ, присвоение СС=1 и выход из подпрограммы. Задержки во время выдачи звуковых сигналов достаточно для надежного запирания ЦЗ.
Если СС=2, то это значит, что система находилась в режиме «Тревога» и выдав короткий звуковой сигнал слову состояния присваивается 1 и происходит выход из подпрограммы.
В противном случае (СС не равно ни 3, ни 1), это значит, что система находилась в режиме «Охрана» и производится включение сигнала на открытие ЦЗ, выдача короткого звукового сигнала, запускается подпрограмма задержки на 1 с, выключается сигнал на открытие ЦЗ, слову состояния присваивается значение 3 и происходит выход из подпрограммы.
Схема алгоритма подпрограммы IS изображена на рис.5.6.
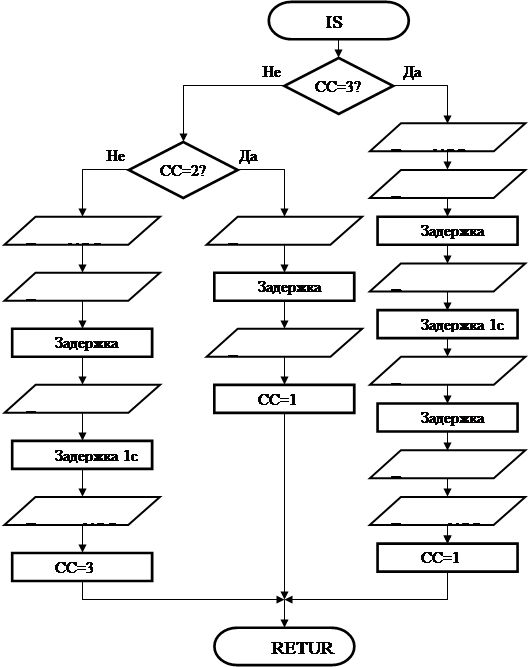
Рис.5.6. Схема алгоритма подпрограммы IS.
Схема алгоритма подпрограммы режима «Тревога» приведена на рис.5.7.
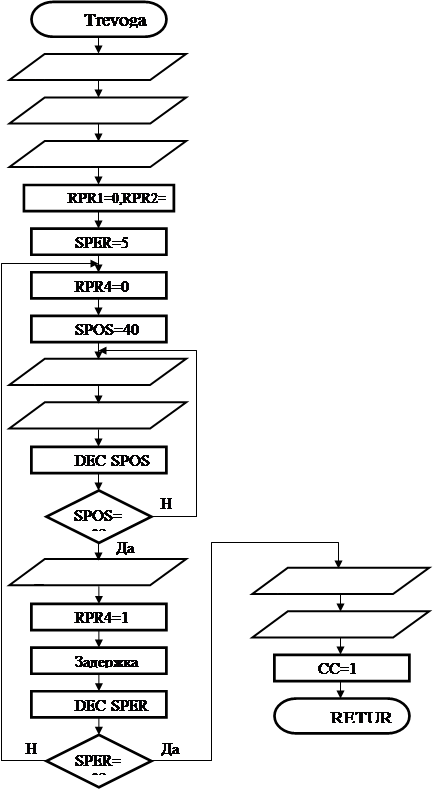
Рис.5.7. Схем алгоритма подпрограммы режима «Тревога».
Подпрограмма режима «Тревога» начинается с выдачи сигнала на блокировку зажигания. Далее включается сирена, подпрограмма мигания габаритных огней, запрещаются прерывания от датчиков, устанавливается счетчик передач SPER=5, запрещаются прерывания от детектора правильного кода, устанавливается счетчик посылок SPOS=40, включается передатчик и выдается на него сообщение через асинхронный передатчик. Потом осуществляется уменьшение счетчика посылок и проверка его на ноль. Если SPOS не равен 0, то последние три действия повторяются, если равен, то передатчик выключается, разрешается прерывание от детектора правильного кода, включается подпрограмма задержки на 10 с, уменьшается на единицу SPER и проверяется на равенство нулю. Если SPER не равен нулю, то вновь запрещается прерывания от детектора правильного кода и повторяются вышеперечисленные действия. Если SPER=0, то сирена и габаритные огни выключаются, слову состояния присваивается значение 1 и производится выход из подпрограммы. Общее время работы системы в режиме «Тревога» составляет примерно 1 мин.
Схема алгоритма подпрограммы режима «Ожидание» представлена на рис.5.8. Сначала запрещаются прерывания от всех датчиков и детектора правильного кода. Загружается счетчик попыток SPOP числом 3 и передается управление подпрограмме ввода кода с клавиатуры и его проверки INKEY. Результатом работы подпрограммы INKEY является установка флажка верности KVER. Если KVER=0, то код будет считаться неверным, если KVER=1 – то верным.
Если KVER=0, то осуществляется уменьшение счетчика попыток. Пока SPOP не равен нулю, то повторяется процедура INKEY с метки MET2. Когда SPOP=0, то загружается счетчик сигналов SSIG числом 3. Далее включается на 0,5 с сирена, уменьшается счетчик SSIG и это повторяется пока SSIG не станет равным нулю. После этого слову состояния присваивается значение 1 и происходит выход из подпрограммы.
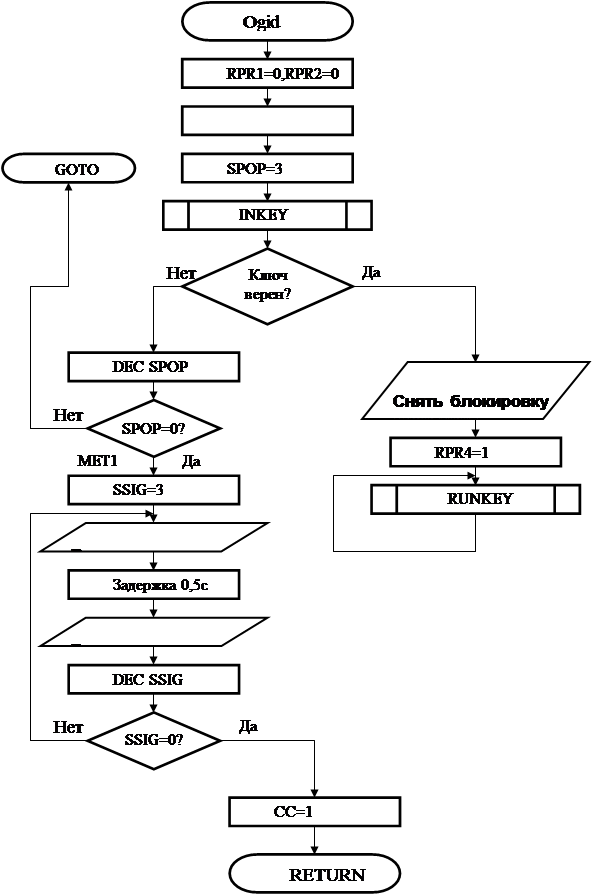
Рис.5.8. Схема алгоритма подпрограммы режима «Ожидание»
Если KVER=1, то снимается блокировка зажигания, разрешается прерывание от детектора правильного кода и в бесконечном цикле запускается подпрограмма работы с клавиатурой RUNKEY.
Схема алгоритма процедуры INKEY приведена на рис.5.9. В ячейках памяти данных с символическими именами NK0, NK1, NK2 и NK3 будет храниться 4 разряда ключа доступа. В ячейках памяти данных с символическими именами VK0, VK1, VK2 и VK3 будет храниться 4 разряда вводимого ключа доступа. Регистр с символическим именем BUK будет буфером клавиатуры и в нем будет храниться набранное на клавиатуре число.
Процедура INKEY начинается с загрузки счетчика сбросов SSBR числом 114. Затем разрешается прерывание от таймера и запускается сам таймер с предделителем на 8. С помощью него задается время, отведенное на набор кода. Оно равно примерно 1 минуту. Далее проверяются ячейки памяти NK0, NK1, NK2 и NK3.
Если во всех их содержатся нулевые значения (сразу после инициализации), то подпрограмма переходит к начальному вводу ключа. Делается это так. Производится опрос клавиатуры и ожидается нажатие клавиши с кодом 11 «Е». Как только это произошло, выдается сигнал на включение светодиода, загружается счетчик нажатий клавиш SN числом 4. После осуществляется ввод четырех первых кодов и последовательный занос их в ячейки памяти NK0, NK1, NK2 и NK3. После четырех нажатий выдается сигнал на выключение светодиода, устанавливается флажок KVER=1 и производится выход из подпрограммы.
Если в ячейках памяти NK0, NK1, NK2 и NK3 содержится ненулевой ключ, то подпрограмма переходит к вводу ключа и его проверки. Делается это так. Производится опрос клавиатуры и ожидается нажатие клавиши с кодом 10 «Т». Как только это произошло, выдается сигнал на включение светодиода и производится последовательный ввод ключа в ячейки памяти VK0, VK1, VK2 и VK3, до нажатия клавиши с кодом 11 «Е». После нажатия этой клавиши нажатий.
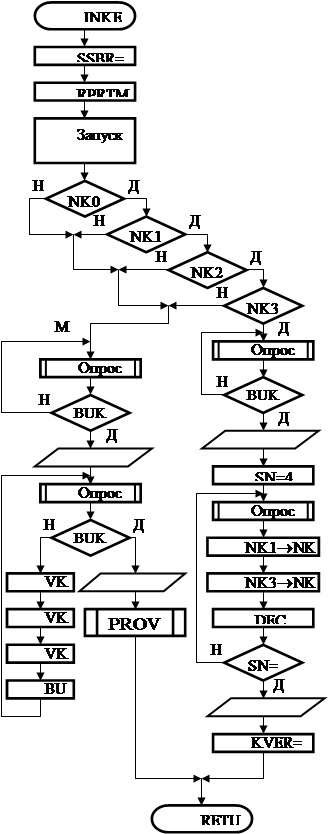
Рис.5.10. Схема алгоритма подпрограммы INKEY.
выдается сигнал на выключение светодиода, запускается процедура проверки PROV и происходит выход из подпрограммы.
Структурная схема алгоритма подпрограммы PROV приведена на рис.5.11.
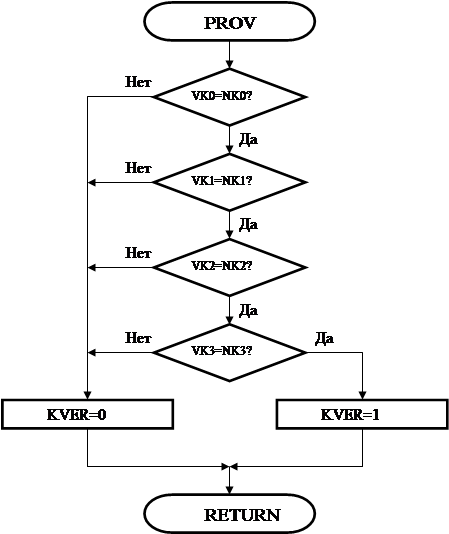
Рис.5.11. Структурная схема алгоритма подпрограммы PROV
В ней производится последовательное сравнение содержимого ячеек памяти VK0, VK1, VK2 и VK3 с содержимым ячеек NK0, NK1, NK2 и NK3 соответственно. При совпадении содержимых устанавливается флажок KVER=1, в противном случае KVER=0 и происходит выход из подпрограммы.
Прерывания от таймера обрабатывает подпрограмма OPTMR1. Структурная схема алгоритма приведена на рис.5.12. Она начинается с уменьшения счетчика сброса SSBR на единицу. Далее следует проверка на ноль. Если SSBR=0, то осуществляется запрет прерывания от таймера и переход на метку MET1, в противном случае происходит запуск таймера с предделителем на 8 и выход из подпрограммы.
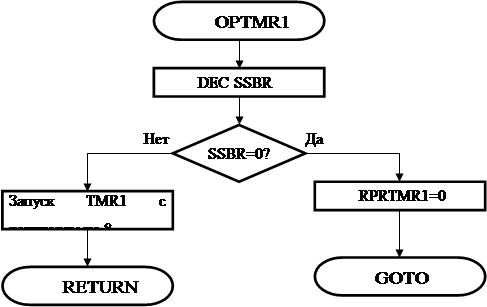
Рис.5.12. Структурная схема обработки прерывания от таймера TMR1
Структурная схема подпрограммы работы с клавиатурой RUNKEY приведена на рис.5.13. Начинается подпрограмма с опроса клавиатуры. Затем осуществляется анализ кода нажатой клавиши.
Если он равен 10, то это значит, что нажата клавиша «Т» - «передача». При этом подается сигнал на включение светодиода, запрещается прерывания от детектора правильного кода, включается передатчик, осуществляется передача идентификационного номера автомобиля, для контроля доступа на охраняемую автостоянку, выключается передатчик, разрешаются прерывания от детектора правильного кода, включается подпрограмма задержки на 0,5 секунды, выключается светодиод и вновь осуществляется опрос клавиатуры.
Если код нажатой клавиши не равен 10, то запускается режим AHJ. При этом загружается счетчик сбросов SSBR числом 57, разрешается прерывание от таймера, запускается таймер с предделителем на 8, подается сигнал на включение светодиода, сбрасывается содержимое ячеек памяти VK0, VK1, VK2 и VK3 в ноль и передается управление подпрограмме INKEY по метке MET2.
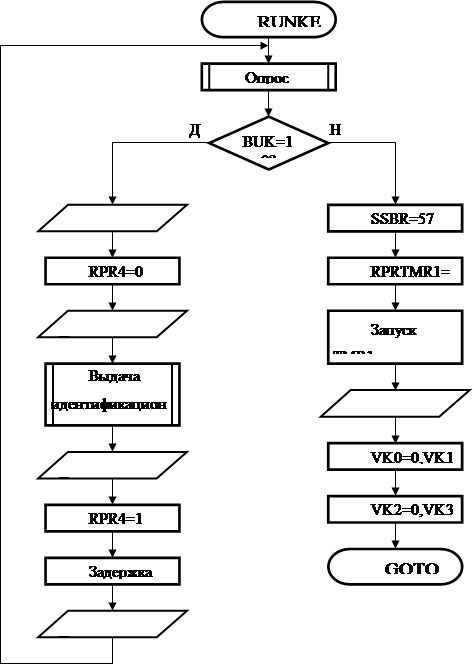
Рис.5.13. Структурная схема алгоритма подпрограммы RUNKEY.
5.2 Разработка управляющей программы
При разработке программы использовался программный продукт MPLAB v.3.22 производства фирмы Microchip. Он представляет собой интегрированную среду, включающую в себя программный эмулятор, внутрисхемный эмулятор и встроенный текстовый редактор и распространяется свободно этой фирмой. Этот пакет поддерживает серии микроконтроллеров, начиная с PIC 16C5X и заканчивая PIC 17CXX. При разработке и отладке использовался программный эмулятор этого пакета.
Головная программа написана по алгоритму, схема которого приведена на рис.5.1.
; головная программа
list p=16c73a, f=inhx8m
#include 16c73a.inc
;-------------------------------------------------------------------------------
CC equ 20 ;присвоение символических имен
RPR equ 21 ;используемым регистрам
RPRTMR1 equ 22
SU equ 23
KK equ 24
SPER equ 25
SPOS equ 26
SPOP equ 27
SSIG equ 28
NK0 equ 29
NK1 equ 2A
NK2 equ 2B
NK3 equ 2C
VK0 equ 2D
VK1 equ 2E
VK2 equ 2F
VK3 equ 30
SN equ 31
BUK equ 32
KVER equ 33
SSBR equ 34
;--------------------------------------------------------------------------------
org 0
goto Begin ;переход к началу программы
org 4
call RZINT ;переход к обработчику прерываний
;------------------------------------------------------------------------------
Begin: bcf STATUS, RP0 ;переход к 0 банку памяти
clrf INTCON ;настройка регистров
clrf PIR2 ;специальных функций
movlw B’00111100’
movwf T!CON
bsf STATUS, RP0 ;переход к 1 банку памяти
movlw B’11000000’ ;настройка регистров
movwf OPTION ;специальных функций
clrf TRISA
movlw B’11100001’
movwf TRISB
movlw B’00110111’
movwf TRISC
clrf PCON
;----------------------------------------------------------------------------------
bcf STATUS, RP0 ;переход к 0 банку памяти
clrf PORTA ;настройка выходных портов
bcf PORTC, RC7
;----------------------------------------------------------------------------------
movlw 1
movwf CC ;начальная установка слова состояния
movlw 2
movwf SU ;начальная установка счетчика ударов
;-----------------------------------------------------------------------------------
Start: btfsc CC, 0 ;анализ слова состояния
btfss CC, 0
goto Trev
btfsc CC, 1
goto Og
call Ohrana ;вызов подпрограммы Ohrana
goto Start
Trev: call Trevoga ;вызов подпрограммы Trevoga
goto Start
Og: call Ogid ;вызов подпрограммы Ogid
goto Start
end
В состав головной программы входит подпрограмма режима охраны Ohrana. Согласно алгоритму, схема которого представлена на рис.5.2. была написана подпрограмма Ohrana. Текст ее приведен ниже.
; подпрограмма Ohrana
Ohrana:
bcf STATUS, RP0 ;переход к 0 банку памяти
bsf PORTA, RA1 ;блокирование зажигания
bsf PORTA, RA3 ;сигнал закрытия ЦЗ
call Del1 ;задержка 1 с
bcf PORTA, RA3
movlw B’10011000’ ;разрешение прерываний
movwf INTCON ;от датчиков
Mor: bsf PORTA, RA4 ;вкл. светодиода
call Del1 ;задержка 1 с
bcf PORTA, RA4 ;выкл. светодиода
call Del1 ;задержка 1 с
goto Mor
Прерывания от датчиков, таймера и детектора правильного кода будут обрабатываться подпрограммой RZINT, текст которой показан ниже. Она написана согласно алгоритму, схема которого показана на рис.5.3.
; подпрограмма RZINT
RZINT:
movf INTCON, 0 ;запоминание разрешенных
movwf RPR ;или запрещенных прерываний
movf PIE1, 0 ;
movwf RPRTMR1 ;
bcf INTCON, 7 ;запрет всех прерываний
bcf PIE1, 0 ;
btfsc INTCON, RBIF ;определение источника прерывания
goto AAA ;переход если прерывание от порта В
A11: btfsc PIR1, TMR1IF
goto BBB ;переход если прерывание от таймера
btfsc INTCON, INIF
goto CCC ;переход если прерывание от ДК
redfie ;возврат
AAA: btfss PORTB, RB5 ;определение источника прерывания
goto AA1 ;переход если прерывание от ДД
btfsc PORTB, RB6
goto BB1 ;переход если прерывание от УЛЗД
btfsc PORTB, RB7
goto CC1 ;переход если прерывание от ДУ
goto A11
AA1: movlw 2
movwf CC ;установка режима “Тревога”
goto Beg
BB1: movlw 2
movwf CC ;установка режима “Тревога”
goto Beg
CC1: call OPDU ;вызов подпрограммы OPDU
goto Beg
BBB: call OPTMR1 ;вызов подпрограммы OPTMR1
goto Beg
CCC: call OPPK ;вызов подпрограммы OPPK
goto Beg
Beg: movf RPR, 0 ;восстановление запомненных
movwf INTCON ;разрешенных или запрещенных
movf RPRTMR1, 0 ;прерываний
movwf PEI1 ;
goto Start
В состав подпрограммы обработки прерываний RZINT входит подпрограмма обработки прерывания от датчика ударов OPDU, текст которой приведен ниже а схема алгоритма на рис.5.4.
; подпрограмма OPDU
OPDU:
bsf INTCON, 7 ;разрешение прерываний от датчиков
bsf PORTA, RA5 ;включение сирены
call Del05 ;задержка на 0,5 с
bcf PORTA, RA5 ;выкл. сирены
decf SU, 1 ;декремент счетчика ударов
btfsc STATUS, Z
goto PPP ;переход если счетчик ударов равен 0
call Del3 ;задержка на 3с
movlw 2
movwf SU ;восстановление счетчика ударов
goto Start
PPP: movlw 2
movwf SU ;восстановление счетчика ударов
movwf CC ;установка режима “Тревога”
goto Start
Также в состав подпрограммы RZINT входит подпрограмма обработки прерывания от таймера TMR1. Ее текст приведен ниже, а схема алгоритма на рис.5.12.
; подпрограмма OPTMR1
OPTMR1:
decf SSBR, 1 ;декремент счетчика сбросов
btfsc STATUS, Z
goto FFF ;переход если счетчик сбросов равен 0
bcf PIR1, 0 ;сброс флага прерывания от таймера
bsf T1CON, 0 ;запуск таймера
return ;возврат
FFF: bcf PIE1, 0 ;запрет прерывания от таймера
goto MET1
6. РАЗРАБОТКА КОНСТРУКЦИИ КОДОВОГО БРЕЛКА
Целью разработки является определение габаритов, конструкции и внешнего вида кодового брелка. Для правильной и удобной компоновки пульта управления нужно учитывать рекомендации эргономики и инженерной психологии с целью приспособления изделия к человеку при полном ограждении человека от отрицательных последствий использования товара. Конструкция его должна облегчать обслуживание, наблюдение за ним и контроль. Следует также учитывать конкретную психологию процесса, т.е. наиболее рациональные условия эксплуатации, при которых снижается расход энергии пользователя и сводится к минимуму его утомление.
При конструировании пульта управления следует руководствоваться ГОСТ 16456-70, который содержит 23 эргономических показателя, и ГОСТ 22973-78.
В настоящее время имеются ГОСТы определенных эргономических требований к пультам управления и контроля, приборам и сигнализаторам, циферблатам и указателям приборов, надписям, безтекстовым обозначениям и символике, ручным и ножным органам управления и др.
Приборная панель служит, для размещения приборов, определяющих параметры работы управляемой системы. Панель следует располагать так, чтобы плоскость лицевой части индикаторов была перпендикулярна линиям взора оператора.
Кнопки применяют для быстрого включения и выключения аппаратуры, для ввода цифровой или логической информации и команд, в особенности при частом выполнении этих действий.
Поверхность кнопки должна иметь вогнутую форму, соответствующую строению пальца, и рифление для предотвращения соскальзывания. Для часто используемых кнопок наиболее удобна четырехугольная форма с закругленными углами или закругленной верхней кромкой. Редко применяемые кнопки могут иметь круглую форму. Конструкция кнопки должна обеспечивать оператору ощущение щелчка, слышимый щелчок или то и другое. Расстояние между соседними краями кнопок должно быть не менее 12 мм (при работе одним пальцем последовательно не менее 6 мм). Минимальный диаметр кнопок под указательный палец – 9 мм, под большой –18 мм.
Усилие нажатия для часто используемых кнопок равно 2,8-II Н (280 - 1100 г), для редко используемых -до 15 Н (1500 г).
Цвет кнопок должен контрастировать с цветом панели; на панели темного цвета кнопки делают светлыми (белого, серого или бежевого цвета). Светлый фон панели требует окраски кнопок в более темные или яркие насыщенные цвета.
Основные рекомендации по выбору формы и размеров кнопок приведены в ГОСТ 22624-77 "Выключатели и переключатели клавишные и кнопочные".
Сигнализатор это индикатор, предназначенный для предъявления человеку сведений в случаях, когда требуется специальное привлечение его внимания
Пространственное размещение индикационных устройств невозможно без учета светотехнических характеристик индикаторов.
Оптимальный размер светового индикатора, предъявляемого на средствах отображения, выбирается с учетом яркости светового индикатора, величины контраста, вида контраста, сложности графического начертания знаков, использования цвета.
Для отображения информации о состоянии охраняемого предмета используем один светодиод. Для выбора цвета освещения, будем руководствоваться таблицей 6.1.
Таблица 6.1. Выбор цветов для световой индикации.
| Категории информации | Рекомендуемый цвет индикации | |
| Основной | Дополнительный | |
| Предупреждающая информация носит осведомительный характер, содержит сведения об общей обстановке (исключая аварийную) и рекомендации для принятия мер, оставляя за оператором право выбора окончательного решения. | Желтый | Белый |
|
Предписывающая информация носит командный характер, требует или разрешает выполнение строгого определенных действий. К этой категории может быть отнесена информация проверочного характера, указывающая на исправность или готовность к работе тех или иных устройств. |
Зеленый | Синий |
|
Запрещающая информация носит аварийный характер, накладывает строгие ограничения на выполнение или запрещение тех или иных действий. Указывает на негодность к работе или неисправность того ми иного проверяемого объекта. |
Красный | Оранжевый |
Исходя из предложенных требовании выбираем один светодиод, желтого цвета свечения с повышенной светоотдачей. С его помощью можно осуществить два режима работы:
· режим нормального состояния системы — отсутствие свечения светодиода;
· режим "ПЕРЕДАЧА" — постоянное свечение светодиода;
Для читаемости надписей необходимо выдерживать оптимальные соотношения основных параметров знака: высоты, ширины, толщины обводки. Толщина линий для знаков обратного контраста составляет 1/10 в высоте знака. Взаимное расположение линий, образующих знак, в соответствии с показателями остроты зрения влияет на читаемость знаков. Лучшим из начертаний надписей обычного типа считается шрифт Макворта, в котором наклонные линии в знаках расположены под углом в 45°, и шрифт Бергера, в котором буквы и цифры составлены прямыми линиями.
Для написания пояснительных надписей используем шрифт Бергера с размерами 2ммх1,5мм. Тексты надписей совпадают с режимами работы системы и располагаются непосредственно над клавишами клавиатуры.
Исходя из приведенных требований, выбираем размеры и цвет кнопок клавиатуры. Расстояние между соседними краями кнопок должно быть 6 мм, диаметр кнопок - 10 мм. При черном цвете передней панели кнопки, будут серого цвета. Они должны иметь вогнутую форму, соответствующую строению пальца, и рифление для предотвращения соскальзывания, с закругленными углами или закругленной верхней кромкой. Конструкция кнопки обеспечивает оператору ощущение щелчка.
Для простоты оперирования кнопками клавиатуры расположим их в верхней части лицевой поверхности пульта. Сверху кнопок пусть располагается светодиод. Таким образом, размеры верхней поверхности составляют 50х70 мм. Исходя из объёмов комплектующих (шифратор – 375 мм2, передающий радиомодуль – 9 360 мм2 , элементы питания – 2400 мм2) высота пульта управления с учётом ширины корпуса будет равна 10 мм.
7. ТЕХНИКО-ЭКОНОМИЧЕСКОЕ ОБОСНОВАНИЕ
7.1 Характеристика проекта
Проектируемая система представляет собой систему охранной сигнализации автомобилей. В разрабатываемой системе будут реализованы функции, как автономной охраны, так и централизованной. Так, например, она будет в режиме «Тревога» выдавать сигнал тревоги, содержащий идентификационный номер автомобиля в радиоканал для последующего улавливания его приемниками, расположенными на постах ГАИ, патрульных машинах, перекрестках и принятием соответствующих мер. Так же в ней будут реализованы функции, позволяющие осуществлять контроль доступа на охраняемую автостоянку.
В состав проектируемой системы будут входить две подсистемы: бортовая и носимая. Бортовая подсистема будет питаться от бортовой сети автомобиля 12В. Носимая кодовый брелок - питается от батареи элементов суммарной ЭДС 5В.
В системе применяется современная элементная база. Изюминкой данной системы является применение PIC-контроллеров фирмы Microchip. Они оптимально подходят для применения в системах подобного класса ввиду низкого энергопотребления, дешевизны этих приборов, простоты программирования. Для защиты системы от взлома техническими средствами (сканера, граббера) будет применяться технология динамических кодов, когда каждый следующий посланный с брелка код будет отличатся от предыдущего никогда не повторяясь. Эта технология будет реализована на специализированных микросхемах HCS300 и HCS500 фирмы Microchip. Радиоканал в системе будет реализован с помощью радиомодулей.
По сравнению с существующими аналогами проектируемая система превосходит их по цене, простоте разработки, наличием функций для централизованной охраны. Стоимость проектируемой системы ожидается значительно меньше, чем у существующих аналогов.
7.2 Расчет сметной стоимости НИОКР
Смета затрат на проведение научно-исследовательской работы рассчитывается по следующим статьям:
1. материалы и комплектующие;
2. спецоборудование;
3. расходы на оплату труда;
4. налоги и отчисления, приравненные к материальным затратам;
5. командировочные расходы;
6. амортизация на полное восстановление основных фондов;
7. прочие расходы;
8. накладные расходы.
Расчет удобно проводить в табличной форме. При расчете затрат на проектирование будем полагать, что затраты на материалы и комплектующие будут составлять 20% от суммы основой зарплаты. Расчет зарплаты будем проводить в табличной форме (см. таблицу 7.1).
Таблица 7.1. Расчет основной заработной платы научно производственного персонала
| Исполнители | Количество | Время работы в году, мес. | Средняя заработная плата в мес., млн. руб. | Сумма основной зарплаты, млн. руб. |
| Научный сотрудник | 1 | 6 | 10 | 60 |
| Инженер | 2 | 6 | 6,6 | 80 |
| Лаборант | 1 | 6 | 4 | 24 |
| Всего | 164 | |||
Таблица 7.2. Смета затрат на НИОКР
| Статьи затрат | Обозначение | Методика расчета | Сумма, млн.руб. |
| 1 | 2 | 3 | 4 |
| 1.Материалы и комплектующие изделия |
Рм |
20% от Зо |
32 |
| 2. Основная заработная плата научно-производственного персонала |
Зо |
См. таблицу 1. | 164 |
| 3. Дополнительная заработная плата научно-производственного персонала |
Зд |
Зд=0,1´Зо |
16,4 |
| 4.Заработная плата прочих категорий работающих |
Зпк |
Зпк=(Зо+Зд)´100%/ /100 |
180,4 |
| 5. Налоги и отчисления, приравненные к материальным затратам |
Рн |
Рн=(Нчер+Нзанят+ Ндошк+Нсз)´(Зо+Зд+ Зпк) Нчер=4%; Нзанят=1% Ндошк=5%; Нсз=35% |
162,36 |
| 6.Командировочные расходы |
Рком |
Рком=0,04´Зо |
6,56 |
| 7. Амортизация |
Ао |
Ао=0,15´Зо |
24,6 |
|
8.Прочие расходы, где Рзс=0,35´(Зо+Зс+Зпк) |
Рпр |
Рпр=(Рм+Зо+Зд+Зпк +Рзс+Рком)´0,08 |
42,05 |
| 9. Себестоимость НИОКР |
Сп |
Сумма выше перечисленных статей | 627,97 |
| 10. Плановые накопления |
Пп |
Пп=Сп´0,15 |
94,19 |
| 11.Налог на добавленную стоимость | НДС |
(Зо+Зд+Зпк+Рсз+Ао+Пп)´ Ндс; Ндс=20% |
121,094 |
| 12. Отчисления в специальные фонды |
Осф |
(Сп+Пп+НДС) хНсф/100; Нсф=2,75 |
8,4 |
| 13. Затраты на НИОКР |
Цотп |
Цотп=Сп+Пп+НДС+Осф |
851,38 |
7.3 Расчет себестоимости и цены готового изделия
Расчет себестоимости и цены готового изделия будем проводить укрупненно. Сначала определим затраты на материалы и комплектующие при производстве.
Таблица 7.3 Расчет комплектующих при производстве проектируемого изделия
| Наименование | Един. изм. | Кол-во | Цена, тыс.руб. | Сумма | ||
| 1 | 2 | 3 | 4 | 5 | ||
| PIC-контроллер | шт. | 1 | 4300 | 4300 | ||
|
Транзисторы КП922А1 |
шт. | 4 | 220 | 880 | ||
| Транзисторы | шт. | 2 | 50 | 100 | ||
|
Микросхема 24LC02 |
шт. | 1 | 860 | 860 | ||
|
Микросхема HCS500 |
шт. | 1 | 4300 | 4300 | ||
|
Микросхема HCS300 |
шт. | 1 | 4300 | 4300 | ||
|
Резисторы C2-33 0,125 |
шт. | 8 | 3,5 | 28 | ||
| Конденсаторы керамические | шт. | 7 | 35 | 245 | ||
| Конденсаторы электролитические | шт. | 1 | 35 | 35 | ||
|
Диоды КД412Г |
шт. | 3 | 175 | 525 | ||
|
Диоды КД522Б |
шт. | 6 | 17,5 | 105 | ||
|
Печатная плата Двусторонняя |
шт. | 1 | 1000 | 1000 | ||
| Печатная плата односторонняя | шт. | 1 | 250 | 250 | ||
|
Радиомодуль CDP-TX-01 |
шт. | 1 | 19259 | 19259 | ||
|
Радиомодуль BC-NBK |
шт. | 1 | 21409 | 21409 | ||
|
Радиомодуль TX-SAW-I.A |
шт. | 1 | 19259 | 19259 | ||
| Дроссели | шт. | 3 | 5 | 15 | ||
| Корпус | шт. | 2 | 150 | 300 | ||
| Стоимость материалов для всей системы | 77170 | |||||
| Транспортно-заготовительные расходы (5-10 %) | 3856 | |||||
| Всего | 81026 | |||||
Определяем себестоимость готового изделия Си по следующему выражению.
Си=Рм+Рк+Рз(1+a)´(1+b)+Нс, (7.1)
Где Рм - затраты на материалы;
Рк - затраты на комплектующие (см. таблицу 7.3);
Рз - расходы на заработную плату;
Нс - налоги, включаемые в себестоимость (45% от Рз).
Рм=Рк´20/55=29,464 млн. руб.
Рз=Рк´25/55=36,83 млн. руб.
Отсюда получаем
Си=29,64+81,026+36,83(1+2,1)´(1+0,021)+0,45´36,83=280,6 млн. руб.
Теперь определяем отпускную цену готовой продукции.
Ци=Си+П+Нц, (7.2)
Где П - плановая прибыль (15% от себестоимости изделия);
Нц - налоги, включаемые в цену готового изделия (23% от цены).
П=0,45´280,6=126,27 млн. руб.
Нц=(Си+П)´23/(100-23)=121,53 млн. руб.
Ци=280,6+126,27+121,53= 528,4 млн. руб.
7.4 Расчет затрат у потребителя
Текущие затраты представляют собой совокупность затрат, связанных с содержанием и эксплуатацией проектируемого изделия. При расчете не учитываются заработная плата обслуживающего персонала и затраты на потребляемую электроэнергию поскольку система автономна и в ней применяется микропотребляющая технология. Основные статьи затрат приведены в таблице 7.4.
Таблица 7.4. Расчет текущих затрат
| Наименование составляющих издержек | Методика расчета | Сумма, млн. руб. |
| 1 | 2 | 3 |
| 1. Амортизационные отчисления |
А=(На´ПСнт)/100 |
58,840 |
| 2. Затраты на текущие ремонты |
Ртр=(Нтр´Цнт)/100 |
2,6 |
| Всего текущих затрат | 61,44 | |
| Затраты на транспортировку и монтаж |
Ктм=Ци´0,01 |
5,28 |
Примечания:
На - норма амортизации на полное восстановление (15%).
Нтр - норматив затрат на текущий ремонт (для системы он составляет 0,5% поскольку система высоконадежная).
Цнт - цена проектируемой системы.
Ктм - затраты на транспортировку и монтаж (1% от цены проектируемой системы).
7.5 Расчет экономического эффекта
На основании расчетов, проведенных ранее, определяется целесообразность внедрения инженерного проекта. Определение экономического эффекта будем проводить в табличной форме аналогично предыдущим расчетам.
Таблица 7.5Расчет экономического эффекта
| Показатели | Единица измер. | Расчетный период |
| 1999 | ||
| 1 | 2 | 3 |
| 1. Прогнозный объем производства | шт. | 1000 |
| 2.Прибыль от единицы продукции | млн. руб. | 126,27 |
|
3.Чистая прибыль от внедрения п.2´п.1´0,75 |
млн. руб. | 95025 |
| 4. Затраты на НИОКР | млн. руб. | 851,38 |
|
5. Затраты у потребителя: текущие затраты затраты на транспортировку и монтаж |
млн. руб. |
61440 5280 |
| 6. Всего затрат | млн. руб. | 66720 |
|
7.Экономический эффект: Превышение результата над затратами (п.3-п.6) |
млн. руб. | 27454 |
Таким образом, проектируемая система является экономически выгодной и прибыль от ее внедрения можно будет получить уже в первом году, которая составляет 27454 млн. руб.
8. ОХРАНА ТРУДА И ЭКОЛОГИЧЕСКАЯ БЕЗОПАСНОСТЬ
8.1 Особенности труда и характеристика условий работы с видеотерминалами
При проектировании системы охранной сигнализации широко используется электронно-вычислительная техника. С помощью ЭВМ осуществляется разработка программного обеспечения для PIC-контроллера, программирование микросхемы дешифратора динамического кода в бортовой подсистеме, программирование шифратора динамического кода в кодовом брелке, разрабатываются печатные платы устройств системы. На программном эмуляторе производится отладка некоторых узлов системы. В результате этого разработчики большую часть своего рабочего времени проводят за экраном видеотерминала ЭВМ.
Видеотерминалы (ВТ): дисплеи, дисплейные устройства, экранные пульты связи с ЭВМ представляют сложные электронные системы, крайне разнообразные по конструкции, форме и размерам.
Деятельность оператора, работающего с вычислительной техникой в процессе проектирования системы, связана с восприятием изображения на экране, необходимостью постоянного слежения за динамикой изображения, различением текста рукописных или печатных материалов, выполнением машинописных, графических работ и других операций.
Наряду с вышеперечисленными факторами на операторов оказывают влияние и другие физические явления в процессе труда: шум машин, тепловыделения, вредные вещества, ионизирующие и неионизирующие излучения, особенности технологического оборудования и организации рабочего места.
ВТ являются источниками выделения тепла и при неправильном тепловом режиме помещения, могут привести к повышению температуры и уменьшению влажности воздуха на рабочих местах, что может вызвать дискомфорт, снижение работоспособности, повышение утомляемости и раздражение кожных покровов.
Можно выделить следующие основные характеристики условий работы операторов ПЭВМ:
- психологическое напряжение;
- недостаточная физическая нагрузка;
- гипокинезия и гиподинамия;
- монотонность.
Проблема тяжёлого утомления операторов имеет аспект, который представлен развитием различного рода невротических состояний с ранним “износом” специалистов. Не только нервные, но и соматические (телесные) заболевания чаще развиваются у лиц с высокой ответственностью в результате труда. В частности, у операторов чаще развиваются неврозы, гипертоническая болезнь, язвенная болезнь, болезни кишечника, печени, атеросклероз сосудов головного мозга, стенокардия и многие другие заболевания.
8.2 Основные вредные и опасные факторы при работе с ВТ
Исследование здоровья 1000 операторов, проведённое кафедрой профилактической медицины и оздоровления окружающей среды университета Кентукки (США), выявило, что они чаще других страдают различными расстройствами зрения, головной болью, мышечными болями в области спины. Для них были характерны также жалобы общеневротического характера: чувство усталости и нервного напряжения в процессе работы, они не чувствовали себя бодрыми после ночного сна и т. п.[51]
В комплексе жалоб, предъявляемых операторами, ведущее место у лиц, работающих с ВТ более половины рабочего времени, занимают жалобы на утомляемость и различные расстройства органов зрения. При этом отмечаются: утомляемость глаз (45%), сильные боли и ощущения песка в глазах (31%), ощущение засорённости и зуда в глазах (24%). Показательно, что болевые ощущения появляются уже в конце рабочего дня (46%). Болевые ощущения в глазах в 1,7 раза чаще у работающих полный рабочий день, в сравнении с занятыми работой с ВТ в пределах 4-5 часов.
Приведённые субъективные характеристики труда операторов подтверждаются и данными объективных исследований. По результатам выполнения теста “арифметические действия” умственная утомляемость отмечалась у 33% обследуемых, у операторов, работающих с ВТ, утомление зрения установлено 80%.
8.3 Эргономико-психологические и санитарно-гигиенические требования к условиям труда операторов
Как показывают исследования, на операторов, работающих с ВТ, в процессе производственной деятельности воздействуют следующие физические факторы: шум, тепловыделения, вредные промышленные вещества, ионизирующие и неионизирующие излучения, специфические нагрузки на орган зрения, монотонность труда, малоподвижность, отсутствие физических нагрузок и др.
В связи с повышенной нагрузкой на орган зрения операторов ВТ важное место среди мероприятий по гигиене их труда занимает работа, направленная на изучение оптимальной световой среды, т. е. организация комфортного и гигиенического естественного и искусственного освещения рабочих мест и помещений [52].
Анализ нормативных требований к освещённости рабочих мест операторов ВТ показывает, что уровень горизонтальной освещённости должен быть 400 лк, а коэффициент пульсации освещённости не более 5% при искусственном освещении [53].
Для общего освещения рекомендуется использовать в основном потолочные или встроенные светильники с люминесцентными лампами. Применяются источники света нейтрально-белого “тёмного” белого света с индексом цветопередачи не менее 70. Допустимый показатель дискомфорта от осветительных установок для этих помещений равен 40.
Для исключения засветок экранов прямыми световыми потоками светильники общего освещения располагаются сбоку от рабочего места, параллельно линии зрения оператора.
Оптимальные условия зрительной работы операторов ВТ обеспечиваются также выполнением требований по цветной отделке помещений с ВТ в зависимости от яркости информации и цветности защитного фильтра.
При организации рабочего места учитываются антропометрические данные операторов, а также размещение элементов оборудования соответственно характеру и последовательности выполняемой работы. Рабочий стол должен иметь стабильную конструкцию. Его минимальные размеры 160´90 см. Сиденье оператора и плоскость стола должны регулироваться по высоте на 42-55 см и 65-85 см соответственно. Тип рабочего кресла выбирают в зависимости от продолжительности работы: при длительной массивное кресло, при кратковременной – кресло лёгкой конструкции, которое свободно отодвигается.
Подножка кресла должна иметь пять опор, чтобы исключить опрокидывание.
ЗАКЛЮЧЕНИЕ
В ходе дипломного проектирования была разработана радиосистема охранной сигнализации автомобиля, реализующая кроме типовых функций контроль доступа на охраняемую автостоянку и возможность использоваться в системах централизованной охраны. При разработке применялась современная элементная база, которая позволяет понизить энергопотребление при работе системы.
Для отладки управляющей программы использовался программный пакет фирмы Microchip v 3.22. Он позволяет разрабатывать программное обеспечение для широкого спектра микроконтроллеров этой фирмы. При разработке программы учитывалась возможность применения вместо PIC 16С73А микроконтроллеры аналогичной структуры, но не имеющие на кристалле энергонезависимой памяти (эти изделия более дешевые). Кроме того в ходе дипломного проектирования освещены вопросы охраны труда и сделано технико-экономическое обоснование дипломного проекта.
В дальнейшей перспективе в разработанной системе можно реализовать дополнительные сервисные функции, совместить в носимой подсистеме функции кодового брелка и приема тревожных сообщений по радиоканалу.
СПИСОК ЛИТЕРАТУРЫ
1. Петриков А.В. Защита и охрана личности, собственности, информации М. 1997
2. Уокер. Электронные системы охраны. Наилучшие способы предотвращения преступлений. “За и против”,1991, с. 112.
3. Охранный документ 2010336, 1994, Вибрационный датчик.
4. Охранный документ 2006950, 1994, Датчик охранной сигнализации.
5. Цедик. Цифровое сторожевое устройство. Радио, 1992,№2,3, с.25.
6. Тимофеев. Датчик колебаний кузова. Радио, 1996, №10, с. 46.
7. Волков. УЗ датчик системы охранной сигнализации. Радио, 1996, №5, с. 54.
8. Рекламный лист «АРГУС-АВТО» АО «Аргус-Спектр».
9. Сирены личной охраны. Радиолюбитель, 1995, №3, с. 18.
10. Нечаев. Охранные устройства с излучателем СП-1. Радио, 1996, №3, с. 42.
11. Сводный прайс-лист на охранное оборудование CONSUL SYSTEM Ltd
12. .Григоров. Питание радиоаппаратуры от бортовой сети автомобиля. Радиолюбитель,1994, №1, с. 29.
13. Бабынин. Питание радиоаппаратуры от бортовой сети автомобиля. Радиолюбитель, 1995, №2, с. 22.
14. Естахов. Антенна для радиоохранной сигнализации. Радиолюбитель, 1996, №8, с. 26.
15. Боглов. Аналоги антенн щелевого типа. Радиолюбитель, 1991, №8, с. 43.
16. Айзенберг. Антенны УКВ.– М.:Связь, 1997.
17. Охранный документ 369853, 1971, Стохов Е.А., Антенна.
18. Чёрный. Распространение радиоволн.– Сов. Радио, 1962.
19. Боглов. Кузов автомобиля в качестве антенны. Радиолюбитель, 1996, №11.
20. СпредНет. Беспроводные системы охраны. СП “Сатурн-Информ.
21. Комплекс оперативного розыска и задержания угнанных транспортных средств “КОРЗ”. Рекламная литература.
22. Малогабаритное охранное устройство. Рекламная литература.
23. Кучко. Миниатюрные радиомодули для передачи цифровой информации. Радиолюбитель, 1996, 11, с. 39.
24. ГОСТ 15150-69. Машины, приборы и другие технические изделия. Исполнения для различных климатических районов. Категории, условия эксплуатации, хранения и транспортирования в части воздействия климатических факторов внешней среды.
25. ГОСТ 14254-80. Изделия электротехнические. Оболочки. Степени защиты. Обозначение. Методы испытаний.
26. ГОСТ 12.2.006-87. Безопасность аппаратуры электронной сетевой и сходных с ней устройств, предназначенных для бытового и аналогичного общего применения. Общие требования и методы испытаний.
27. ГОСТ 23511-79. Радиопомехи индустриальные от электротехнических устройств, эксплуатируемых в жилых домах или подключаемых к их электрическим сетям, нормы и методы измерений.
28. ГОСТ 16842-82. Радиопомехи индустриальные. Методы испытаний источников индустриальных радиопомех.
29. ГОСТ 9.301-86. Покрытия металлические и неметаллические неорганические. Общие требования.
30. ГОСТ 9.302-88. Покрытия металлические и неметаллические неорганические. Методы контроля.
31. РД 4.005.052-89. Правила оформления временных разрешений в процессе производства.
32. ГОСТ Р 50009-92. Совместимость технических средств охранной, пожарной и охранно-пожарной сигнализации электромагнитная. Требования, нормы и методы испытаний на помехоустойчивость и индустриальные радиопомехи.
33. РД 107.9.4002-88. Покрытия лакокрасочные. Номенклатура, свойства и область применения.
34. ГОСТ 24297-87. Входной контроль продукции. Основные положения.
35. ГОСТ 26342-84. Средства охранной, пожарной и охранно-пожарной сигнализации. Типы, основные параметры и размеры.
36. ГОСТ 27990-88. Средства охранной, пожарной и охранно-пожарной сигнализации. Общие технические требования.
37. ГОСТ 29037-91. Совместимость технических средств электромагнитная. Сертификационные испытания. Общие положения.
38. ГОСТ 23585-79 (ГОСТ 23587-79). Монтаж электрический радиоэлектронной аппаратуры и приборов.
39. ГОСТ 23588-79 (ГОСТ 23594-79). Монтаж электрический радиоэлектронной аппаратуры и приборов.
40. ГОСТ 4.188-85. Средства охранно-пожарной сигнализации. Номенклатура показателей.
41. ГОСТ 2.144-70. Правила построения ,изложения и оформления.
42. ГОСТ 2.601-68. ЕСКД. Эксплуатационные документы.
43. ГОСТ 25 1099-83. Средства пожарной, охранной сигнализации. Общие технические требования и методы испытаний.
44. ОСТ 4ГО.054.205. Покрытия лакокрасочные. Типовые технологические процессы.
45. ГОСТ 12997-84. Изделия ГСП. Общие технические условия.
46. ГОСТ 27.410-87. Надежность в технике. Методы контроля показателей надежности и планы контрольных испытаний на надежность.
47. ГОСТ 29280-92 (МЭК 1000-4-92). Совместимость технических средств электромагнитная. Испытания на помехоустойчивость. Общие положения.
48. ГОСТ 9.014-78. Временная противокоррозионная защита изделий Общие требования.
49. ГОСТ 27570.0-87. Безопасность бытовых и аналогичных электроприборов. Общие требования и методы испытаний.
50. ГОСТ 24555-81. Порядок аттестации испытательного оборудования
51. Барабаш В.И. Охрана труда специалистов, работающих с видеотерминалами. Методические рекомендации. Ленинград: ЛПИ им М.И. Калинина, 1990
52. Гигиенические требования к видеодисплейным терминалам, персональным ЭВМ и организация работ. Санитарные правила и нормы РФ.
53. Санитарные правила и нормы N 11-13-94. Санитарные нормы микроклимата производственных помещений. Мн. РБ. 1994.
54. Методические рекомендации по снижению зрительного утомления операторов ВТ / ВНИИОТ ВЦСПС, Л-1984.
55. Сибаров М.Г. Охрана труда в вычислительных центрах. М.- 1990
© 2010 Интернет База Рефератов