
Рефераты по сексологии
Рефераты по информатике программированию
Рефераты по биологии
Рефераты по экономике
Рефераты по москвоведению
Рефераты по экологии
Краткое содержание произведений
Рефераты по физкультуре и спорту
Топики по английскому языку
Рефераты по математике
Рефераты по музыке
Остальные рефераты
Рефераты по авиации и космонавтике
Рефераты по административному праву
Рефераты по безопасности жизнедеятельности
Рефераты по арбитражному процессу
Рефераты по архитектуре
Рефераты по астрономии
Рефераты по банковскому делу
Рефераты по биржевому делу
Рефераты по ботанике и сельскому хозяйству
Рефераты по бухгалтерскому учету и аудиту
Рефераты по валютным отношениям
Рефераты по ветеринарии
Рефераты для военной кафедры
Рефераты по географии
Рефераты по геодезии
Рефераты по геологии
Рефераты по геополитике
Рефераты по государству и праву
Рефераты по гражданскому праву и процессу
Рефераты по делопроизводству
Рефераты по кредитованию
Рефераты по естествознанию
Рефераты по истории техники
Рефераты по журналистике
Рефераты по зоологии
Рефераты по инвестициям
Рефераты по информатике
Исторические личности
Рефераты по кибернетике
Рефераты по коммуникации и связи
Курсовая работа: Аналіз функціональних схем, основні елементи систем автоматичного регулювання підсилення
Курсовая работа: Аналіз функціональних схем, основні елементи систем автоматичного регулювання підсилення
АНАЛІЗ ФУНКЦІОНАЛЬНИХ СХЕМ, ОСНОВНІ ЕЛЕМЕНТИ СИСТЕМ АРП
1. Загальна характеристика та аналіз функціональних схем систем регулювання підсилення
Різновиди систем АРП
Автоматичне регулювання підсилення призначене для підтримки рівня вихідного сигналу прийомного пристрою або підсилювача поблизу деякого номінального значення при зміні рівня вхідного сигналу. Автоматичне виконання цієї функції необхідно тому, що зміни рівня вхідного сигналу можуть відбуватися хаотично і досить швидко. Ручне регулювання підсилення використовується лише для установки рівня вихідного сигналу, що повинний підтримуватися системою АРП.
Є багато причин, через які рівень вхідного сигналу безупинно змінюється [8]:
- зміна відстані між джерелом випромінювання і приймальним пристроєм;
- зміна умов поширення радіохвиль;
- інтерференція радіохвиль, що прийшли в місце прийому по різних
шляхах;
- перебудова приймача з однієї станції на іншу;
- зміна взаємоспрямованості приймальних і передавальних антен і т.д.
У радіозв'язку напруга сигналу на вході приймача може зміняться в 106 раз і більше. Вихідна напруга приймача при цьому не повинна змінюватися більш ніж у 1,2 ÷ 3 рази. Ця вимога диктується як припустимими перекручуваннями інформаційної складової сигналу в тракт прийомного пристрою, так і відсутністю перевантажень його каскадів, що можуть привести до тривалих утрат чутливості. При цьому сама система АРП не повинна викликати надмірних перекручувань огинаючої сигналу або призводити до появи паразитної амплітудної модуляції сигналу, тобто система АРП повинна бути стійкою.
В ідеальному випадку вихідна напруга приймача (підсилювача) повинна залишатися незмінною після досягнення деякого значення Uвих min, що забезпечує нормальну роботу кінцевої апаратури. Це значить, що коефіцієнт підсилення повинний змінюватися за законом [9]
![]()
Реальні системи АРП відповідають цьому співвідношенню з великим або меншим наближенням.
Системи АРП можуть бути зворотніми і прямими. Зворотні системи АРП є системами зі зворотним зв'язком — у них точка знімання напруги для формування регулюючого впливу розташована далі від входу приймача, чим точка прикладення регулюючого впливу. Інакше кажучи, це системи з регулюванням «назад». У прямих системах АРП точка знімання напруги для запуску схеми АРП розташована ближче до входу приймача, чим точка прикладення регулюючого впливу. Ці системи не утворюють кола зворотнього зв'язку системами з регулюванням «уперед». Кожна з цих систем має переваги і недоліки.
Зворотні системи АРП не можуть дати повної сталост вихідної напруги, тому що воно є вхідним для системи АРП і повинне містити нформацію для відповідної зміни регулюючого впливу. Крім того, вони не можуть забезпечити одночасно велику глибину регулювання (Uвих ≈ const) і високу швидкодію з міркувань стійкості. Однак ці системи захищають від перевантажень усі каскади приймача, розташовані далі від входу, чим точка прикладення регулюючого впливу, а самі ланцюги АРП є під впливом сигналу зі стиснутим динамічним діапазоном також не піддані перевантаженням.
Прямі системи АРП принципово можуть забезпечити деальне регулювання, тобто Uвих ≈const при Uвих ≥ Uвих min і як завгодно високу швидкодію. Однак практично це не досягається, тому що ступінь сталості вихідно напруги обумовлений конкретними даними елементів ланцюга АРП і ланцюгів прийомного пристрою, підданих технологічним розкидам, тимчасовим і режимним змінам. Ланцюг АРП захищає від перевантажень тільки ті каскади, що розташован далі точки прикладення регулюючого впливу, і сам є під впливом сигналу із широким динамічним діапазоном, тобто підданий перевантаженням і повинен містити внутрішні зворотні системи АРП. У цьому випадку система АРП практично перетворюється в окремий канал прийомного пристрою, не менш складний, чим його основний канал.
Усі ці причини призводять до того, що в даний час більше поширення одержали зворотні системи АРП. Очевидно, кращі результати може дати застосування комбінованої системи АРП, що включає в себе ланцюги зворотньо прямої АРП з переважаючим впливом зворотнього ланцюга АРП. Функціональна схема такої комбінованої системи АРП приведена на рис. 1.
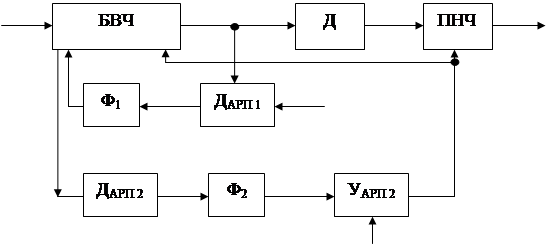
Рис 1. Функціональна схема комбінованої системи АРП
Зворотня система АРП утворюється детектором АРП ДАРП 1 , фільтром Ф1 і всіма каскадами основного тракту, розташованими між точкою прикладення регулюючої напруги Uр1 виходом блоку високої частоти (БВЧ).
В пряму систему АРП входять детектор Д АРП 2 , фільтр Ф2 і підсилювач постійної напруги У АРП 2 . Регулююча напруга Uр2 вводиться в БВЧ і в підсилювач низької частоти - ПНЧ (останнє не обов'язково і використовується рідко). Фільтри Ф1, Ф2 додають ланцюгам АРП необхідну інерційність, обумовлену як розуміннями стійкості (АРП1), так і відсутності демодуляції АМ-сигнала (АРП1, АРП2). Роль фільтрів Ф1 і Ф2 можуть грати навантажувальні ланцюги відповідних детекторів. Регулюючі напруги Uр1 Uр2 містять складові, що змінюються з частотами паразитної амплітудної модуляц вхідного сигналу, обумовленої перерахованими раніше причинами, але не містять складових, що змінюються з частотою корисної модуляції. Ці складов безперешкодно проходять через основний тракт радіоприймального пристрою, виділяються детектором Д и підсилюються підсилювачем низької частоти, утворюючи вихідну напругу приймача U вих. НЧ. Звичайно немає необхідності знижувати посилення слабких сигналівU вх > U вх min, що не створюють перевантажень приймача і не забезпечують номінальної вихідно напруги навіть при максимальному посиленні БВЧ і ПНЧ. Для додання ланцюгам АРП граничних властивостей, тобто включення їх тільки при визначеній амплітуд сигналу, ланцюг АРП замикають примусовим зсувом і відмикають тільки після того, як напруга сигналу перевищить напругу запирання. Звичайна напруга запирання («затримки») подається на детектори або підсилювачі АРП. На рис. 3.1 це напруги Ез1 і Е з Подібн системи АРП називаються затриманими. Затримка може бути введена по середньому значенню сигналу або по максимуму. Якщо постійна часу навантажувального ланцюга, ДАРП 1, менше періоду повторення імпульсів (при мпульсному сигналі) і діод Д АРП 1 , замкнений напругою затримки Е31, то при Uвих < Е31 система АРП буде розімкнута. При U вих >Е31 діод ДАРП 1 відкривається кожним імпульсом, що задовольняє цій умові, після фільтрації у фільтрі Ф1 виробляється регулююча напруга Uр1 , пропорційна амплітуді максимального імпульсу. Це система АРП по максимуму сигналу, що прагне підтримати постійним максимальне значення вихідної напруги.
У системі АРП2 напругою затримки Ез2 закритий підсилювач постійної напруги У АРП Він відкриється тільки тоді, коли випрямлена і профільтрована фільтром Ф2 напруга перевищить Ез Ця напруга пропорційна середньому значенню вхідного сигналу. У такий спосіб створюється система АРП по середньому значенню, що прагне підтримати незмінним середнє значення вихідної напруги. На рис. 3.1 у ланцюзі АРП 1 немає спеціального підсилювача ні в ланцюгах високо частоти, ні на постійному струмі. Це не посилена система АРП. Система АРП 2 - посилена, тому що містить підсилювач У АРП 2 посилюючий сигнал у ланцюзі АРП 2 (регулююча напруга). Посилені системи АРП мають більшу глибину регулювання і здатні забезпечувати менший динамічний діапазон вихідного сигналу.
З принципу дії системи АРП випливає, що при слабкому сигналі коефіцієнт підсилення приймача максимальний. При цьому на виход прослуховуються шуми, створені зовнішніми перешкодами і власними флуктуаційними процесами в каскадах радіоприймального пристрою. У деяких випадках це небажано тоді використовується безшумова система АРП (рис. 2). Автогенератор Г генеру коливання досить високої частоти, які знаходяться поза межами смуги пропускання ПНЧ. Ці коливання детектуються детектором Дг і випрямлена напруга замикає один з каскадів ПНЧ. З появою сигналу за умови Uвих> Е3 замикається система АРП починає виробляти напругу UР, що прикладається до електродів активного приладу генератора Г и зрива його коливання. При цьому знімається напруга, що замикає ПНЧ, і сигнал почина надходити на вихід.
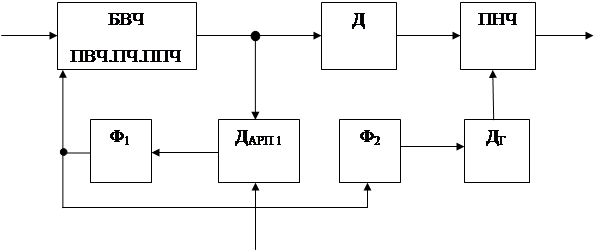
Рис. Часове регулювання підсилення (ЧРП)
Така функціональна схема приведена на рис. 3. Пусковий мпульс 1 від модулятора РЛС, генеруємий одночасно з зондувальним імпульсом, запуска генератор регулюючої напруги (ГРН). У початковий момент часу напруга U р взагалі може замикати прийомний тракт, здійснюючи «бланкування» приймача. Потім по мірі зменшення U р підсилення приймача збільшується, доходячи до максимально можливого. Таким чином підсилення виявляється зв'язаним з дальністю. Визначена форма і швидкість зміни Uр (t) встановлюються в залежності від конкретних умов. Система ЧРП є автономною, не зв'язаною з інтенсивністю вхідного сигналу в кожен даний момент часу.
По ступені швидкодії розрізняють інерційні АРП швидкодіючі АРП (ШАРП). Ступінь швидкодії визначається відносно швидкості зміни нтенсивності сигналу. Висока швидкодія не дозволяє одержати великої глибини регулювання з розумінь стійкості, тому для досягнення загальної великої глибини регулювання приходиться застосовувати кілька послідовних кілець ШАРП (рис. 4. Послідовні кільця ШАРП), причому найчастіше одне кільце охоплює всього один підсилюючий каскад.
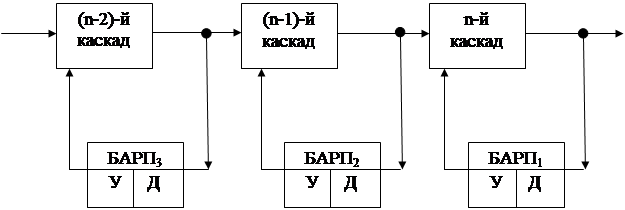
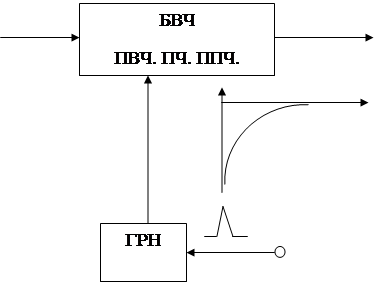
Рис. 3.Функціональна схема імпульсної системи АРП
Рис. 4. Послідовні кільця ШАРП
Цифрова АРП (ЦАРП) має ряд переваг перед звичайними аналоговими системами [8,9]:
- незалежність тривалості процесу встановлення необхідного підсилення від рівня вхідного сигналу;
- незалежність регулюючих характеристик від розбросів конкретних властивостей ланцюга АРП і регулюємого підсилювача (при цілком цифровому виконанні);
- можливість встановлення необхідного підсилення після прийому першого імпульсу;
- астатизм і збереження встановленого підсилення при перервах у прийомі сигналу.
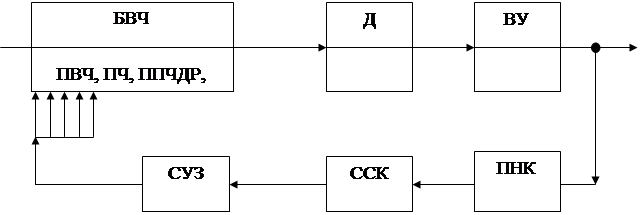
Побудова зворотної системи ЦАРП ілюструється функціональною схемою ( рис. 5. Функціональна схема зворотньої системи ЦАРП ). Вихідна напруга відеопідсилювача перетворюється у двійковий код у перетворювач напруга — код (ПНК). Код вихідної напруги N вих порівнюється з еталонним кодом Nе в схемі порівняння кодів (СПК), у результаті чого утворюється код неузгодженості ∆N. Помітимо, що СПК — не що інше, як цифровий граничний пристрій, а еталонний код — цифровий аналог напруги затримки. У результаті порозрядного усереднення в схемі усереднення запам'ятовування (СУЗ) (цифровий аналог фільтра звичайної АРП) виробляється код регулювання. Код регулювання керує регульованими елементами з дискретним двійковим регулюванням. Число таких елементів дорівнює числу розрядів коду регулювання й у залежності від наявності в даному розряді N р нуля або одиниці відповідний елемент регулювання має мінімальний або максимальний коефіцієнт передачі. У схемі рис. 5 покладається, що цими регульованими елементами є каскади ППЧ із дискретним регулюванням (ППЧДР). Перепад коефіцієнта передачі елемента, що відповідає даному розрядові, сполучений з старшинством розряду.
 Uвх Uвих Uвих ВУ
Uвх Uвих Uвих ВУ
Nр ∆N Nвих
Рис. 5. Функціонльна схема зворотньої системи ЦАРП
Нехай число регульованих елементів п = 6 відповідно код регулювання -шестирозрядний. Максимальне значення шестирозрядного двійкового коду
N р max = 25 + 24 + 23 + 22 + 2 +1 = 63
( Nр = ап-1 2n-1 + а n-2 2 n-2 +...+ а n-1 2n-1 + ...+а1 2 1 + а0 20,
де аj = 0 або 1 ). Нехай загальний динамічний діапазон регулювання посилення Gр - 126 дБ. Тоді ціна молодшого розряду т = Gp/Np max = 126/63 =2 дБ.
Для і-го регульованого елемента перепад посилення G pi =т2 n-1 дБ,
Таким чином, регульовані елементи повинні давати наступні перепади підсилення (див. табл. 3.1).
Таблиця 3.1.
| І | 1 | 2 | 3 | 4 | 5 | 6 | Всього |
|
G р1,дБ |
64 | 32 32 | 16 | 8 | 4 | 2 | 126 |
Ціна молодшого розряду визначає досяжну точність регулювання при ідеальній роботі всіх інших елементів схеми. В принципі можна мати як завгодно високу точність роботи ЦАРП. тому що цифрова схема запам'ятовування Np є ідеальним інтегратором і забезпечує систем властивість астатизму.
Розглянемо коротко особливості амплітудних характеристик регульованого підсилювача при дії АРП (рис. 6. Амплітудна характеристика регулювання підсилення ). Якщо система АРП відсутня (крива 1), то, починаючи з деякого значення Uвх n з'являється перевантаження підсилювача і його здатність передавати збільшення напруги Uвх губиться. При цьому амплітудна модуляція вхідної напруги спотворюється або усувається зовсім.
При наявності незатриманої системи АРП (крива 2) коефіцієнт підсилення починає зменшуватися з появою напруги Uвх , однак скривлення амплітудної характеристики ще не свідчить про перекручування АМ-сигналу, якщо система АРП інерційна. Зображені на рис. 6 амплітудн характеристики є статичними і зняті при повільній зміні напруги Uвх, тобто при замкнутій системі АРП. Інерційна система АРП не замикається для складових корисної модуляції і тому, захищаючи підсилювач від перевантаження, сприяє неспотвореному відтворенню цієї корисної модуляції сигналу на виході. При наявності затриманої (або підсилено-затриманої) системи АРП (крива 3) коефіцієнт підсилення слабких сигналів (U вх < Uвхmin) не знижується й амплітудні характеристики підсилювача без АРП і з АРП збігаються за умови U вх < Uвх min. Починаючи з деякого значення U вх АРП, сам ланцюг АРП починає перевантажуватися і його стабілізуюча дія послабляється.
Елементи систем АРП
У загальному випадку в систему АРП входять регулюєм елементи, амплітудний детектор із примусовим зсувом (затримкою) або без нього, фільтри і додаткові підсилювачі на змінному або постійному струмі (до детектора АРП або після нього). Специфічними тут є регулюємі елементи, тому далі вони розглядаються більш докладно. Звичайно застосовуються чисто електричні методи регулювання. Основними з них можна вважати наступні [9]:
1) зміна підсилювальних параметрів активних приладів шляхом додатка регулюючої напруги Uр до їхніх електродів. При цьому змінюється режим роботи активного приладу, тому подібні способи зміни посилення іноді називають режимними;
2) використання аттенюаторів. що включаються в тракт проходження сигналу і керованих регулюючою напругою UР;
3) застосування керованих ланцюгів негативного зворотного зв'язку. При цьому регулююча напруга U р впливає на елементи, що визначають коефіцієнт передачі ланцюга зворотного зв'язку β = U oc / Uвих , що приводить до зміни посилення підсилювача, охопленого негативним зворотнім зв'язком;
4) зміна навантажувальних опорів підсилювальних каскадів шляхом застосування керованих опорів — варикапів, варисторів, діодів, біполярних і польових транзисторів.
Використовуються і комбіновані схеми регулювання, що поєднують кілька перерахованих методів регулювання.
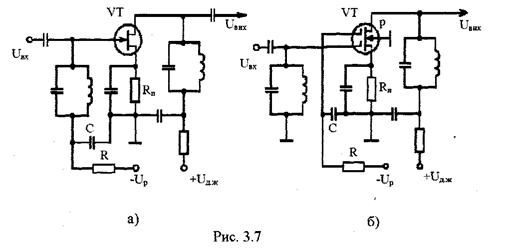
Приведемо кілька конкретних прикладів різних регулювань посилення. Режимні регулювання найкраще реалізуються стосовно до польових транзисторів і електронних ламп. У цих приладів крутість S залежить від напруги між затвором і джерелом (сіткою і катодом), причому в області напруг, де струми затвора або керуючої сітки відсутні. Це дозволя подачею UР у ланцюг затвора або керуючої сітки регулювати посилення каскаду практично без витрати потужності від джерела напруги UР.
Принципові схеми введення напруги UР стосовно до польових транзисторів приведені на рис. 7. У схемі рис. 7, а регулююча напруга вводиться в ланцюг затвора через СR - фільтр, що володіє малою постійної часу і призначений тільки для фільтрац складових несущої частоти сигналу. Напруга UР має негативний знак, тому що використовується транзистор з n-каналом, а збільшення Uр повинне приводити до зниження крутизни.
У схемі рис. 7, б напруга Uр вводиться в ланцюг другого затвора двухзатворного транзистора з р-каналом. В обох випадках при Uр - 0 положення робочої точки визначається автоматичним зсувом за рахунок опору Ru, (|Е0| = ІоRu). Це опір, створюючий зворотній зв'язок на постійному струмі, перешкоджає зміні крутизни S при впливі UР і тому іноді виключається зі схеми регульованого каскаду. У цьому випадку початкова напруга зсуву подається по ланцюгу напруги Uр (UР = Е0 при непрацюючій системі АРП).
|
|
|
Для підсилювачів на польових транзисторах можна вважати, що залежність коефіцієнта підсилення від напруги UР К0 (UР) цілком визначається залежністю S (Uр), тому що Ко = SRеК, а RеК = const.
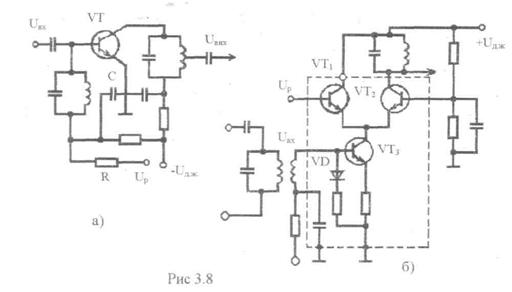
У схемах підсилювачів на біполярних транзисторах регулююча напруга звичайно вводиться в ланцюг бази (рис. 8. а,б Схеми підсилювачів на біполярних транзисторах) з такою полярністю, щоб його збільшення зменшувало колекторний струм Ік транзистора. Низькочастотна крутизна S0 біполярного транзистора, його вхідна g вихідна g1 провідності, а також постійна часу t залежать від струму Ік так, як показано на рис. 9. Таким чином, при збільшенні напруги Uр буде зменшуватися струм Ік, а також крутизна S0, що і потрібно для здійснення АРП. Однак одночасно зменшуються вхідна і вихідна провідності, що приводить до росту підсилення попереднього і даного каскадів.
З розгляду цих ефектів випливає, що режимне регулювання біполярних транзисторів утруднене за рахунок впливу протилежно змінюючихся параметрів. Необхідно, щоб визначальною була зміна крутизни S0. Цій умові звичайно задовільняють транзистори з великим значенням β = h21 е (коефіцієнт передачі струму в схемі ОЕ) і малим опором бази rб. Регулююча здатність залежить від робочої частоти. На даній робочій частот модуль крутизни
![]() ,
,
причому т змінюється так само, як і S0 (див.рис. 9).
Якщо ![]() , то S >>S0, але при
, то S >>S0, але при ![]() режимне
регулювання взагалі неможливе, тому що |S|
перестає залежати від Ік.
режимне
регулювання взагалі неможливе, тому що |S|
перестає залежати від Ік.
В основі регульованого підсилювача, зображеного на рис. 8, б, лежить часто використовувана в прийомній техніці диференціальна мікросхема в особливому включенні. Транзистори VТ3 VТ2 утворюють каскодне з'єднання. Регулююча напруга подається на базу транзистора VТ1. При підвищенні напруги Uр транзистор VТ1 усе більше відмикається, його струм збільшується. Одночасно падає колекторний струм транзистора VТ2, тому що сума цих струмів дорівнює току транзистора VТ3 практично постійна. Таким чином, регулювання підсилення відбувається за рахунок непрямого впливу напруги Uр на струм і крутизну транзистора VT2 завдяки перерозподілові струму транзистора VТ3, між транзисторами VТ1 ,VТ
Зі сказаного випливає, що на підставі залежностей (звичайно експериментальних), зображених на рис. 9, можна побудувати залежність K0(Ik)=S(Ik)Rek(Ik), а потім перерахувати зміни колекторного струму Ік у зміни регулюючої напруги Uр і одержати залежність К0 (Uр). Діапазон зміни коефіцієнта підсилення одного каскаду при режимному регулюванні не може перевищувати деякої межі, обумовленої просочуванням сигналу через майже закритий транзистор (паразитн мності) і припустимим максимальним струмом через нього. Звичайно не вдається одержати зміни посилення на один каскад більш ніж у 60…80 разів, а з урахуванням припустимих нелінійних перекручувань що обгинає — у 15… 20 разів.
|
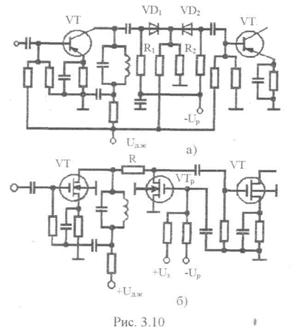
На рис. 10. приведено приклади керованих атенюаторів, як використовуються як регулюємі елементи систем АРП. На рис. 3.10, а зображена схема двухланкового діодного аттенюатора. Діоди VD1 і VD2 при відсутності напруги UР максимально відімкнуті від'ємною напругою, що знімається з дільника R1R При цьому коефіцієнт передачі максимальний, тому що внутрішній опір діодів мінімальний. В міру збільшення напруги Uр діоди підзапираются, їхні опори збільшуються і коефіцієнт передачі падає. Відношення Kmax/Kmin може досягати 103 на не дуже високій робочій частоті. Варто враховувати, що при сильних сигналах діоди працюють в області великої кривизни їхніх характеристик і нелінійні перекручування можуть досягати неприпустимих значень. З урахуванням цього не рекомендується змінювати коефіцієнт передачі одного осередку аттенюатора більш ніж у 60… 70 разів. На рис. 3.10, б роль регульованого опору грає польовий транзистор VТР (R — опір, що гасить). Регульований польовий транзистор встановлюється в режим малої напруги на стоці і працю на ділянці вихідної характеристики, розташованої до крапки перегину. У цьому режимі польовий транзистор має внутрішній опір, що залежить від напруги на затворі.
При слабкому сигналі Uр = 0 і транзистор замкнений. Коефіцієнт передачі при цьому максимальний. По мірі збільшення сигналу підвищується напруга Uр (у даному випадку Uр < 0, тому що транзистор має р-канал) і транзистор відмикається, знижуючи свій внутрішній опір. Перепад опорів, що дається польовим транзистором з зольованим затвором, може бути дуже великим (Rі ≈ 700 кОм + 500 Ом). Відношення Kmax/Kmin для однієї ланки може досягати 103 ÷ 3 · 103 при порівняно невеликих нелінійних перекручуваннях, тому що транзистор саме при великих сигналах працює в області найвищої лінійності характеристик. Це характерно для схем, у яких регульовані елементи стоять в паралельних гілках аттенюатора.
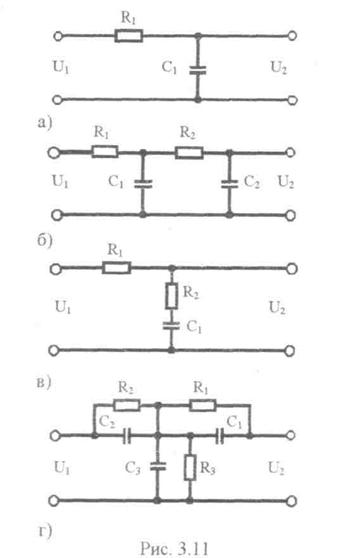
Перехідні процеси, стійкість, перекручування комплексної огинаючої сигналу при дії АРП багато в чому залежать від властивостей і виду фільтра, що входить у систему АРП. В основному використовується одноланковий RС-фільтр низьких частот (рис. 11 ,а). Він дає аперіодичний процес установлення підсилення і забезпечує стійкість системи, якщо є єдиною інерційною ланкою. Рідше застосовується двухланковий RС-фільтр низьких частот (рис. 11, б), що дає аперіодичний процес установлення тільки при визначеному співвідношенні постійних часу ланок і не забезпечує абсолютної стійкості системи АРП. Однак він може забезпечити велику швидкість перехідного процесу. Використовуються також одноланкові кореговані RС-фільтри низьких частот (рис. 11 ,б). Подібний фільтр по порівнянню з фільтром рис. 11, а дає менше фазовий зсув між напругами U2 і U1 при більшому коефіцієнті передачі в області вищих частот Ω→∞ [ при Kф→R2/(R1+R2) ]. В спеціальних випадках може застосовуватися фільтр у виді подвійного Т-образного моста (рис. 11, г), що має Кф = 0 на частоті балансу. Частоту балансу беруть рівній частоті корисної модуляц сигналу. Іноді роль фільтра, що визначає інерційність системи АРП, гра навантажувальний ланцюг детектора АРП, тобто використовується інерційний детектор.
У системах з безперервним сигналом регулююча напруга утвориться звичайно в результаті детектування коливань високої або проміжно частоти, тому що воно повинно бути пропорційно амплітуді несучої. Зокрема, як детектор АРП може використовуватися детектор каналу сигналу з додаванням ланцюгів, що дозволяють здійснити затримку. У системах з імпульсним сигналом, коли амплітуда вихідних відеоімпульсів пропорційна амплітуді радіоімпульсів на вході приймача (немає відеообмежників), можуть використовуватися відеоімпульсн детектори АРП, інерційні по відношенню до огинаючої відеоімпульсно послідовності або безінерційні.
В імпульсних системах знаходять також застосування ключові детектори і детектори зі скиданням (із примусовим розрядом ємност навантаження перед приходом кожного імпульсу). Ці детектори власне кажучи розширниками імпульсів (від τи до Тп, де Тп період повторення імпульсів) і їх не слід розглядати як інерційні ланки. Подібні детектори дозволяють підвищити стійкість системи АРП і домогтися великої глибини регулювання. Можуть застосовуватися і транзисторні детектори з обліком властивих їм недоліків, що дозволяють підвищити ефективність системи АРП без спеціальних підсилювачів [9].
|
|
|
|
|
|
|
|
|
|
|
|
У системах АРП звичайно використовуються підсилювач постійної напроти (ППН). Вони мають верхню граничну частоту Fв<<F м де Fм частота модуляції, і тому можуть мати високий коефіцієнт підсилення. Живлення ППН повинне здійснюватися таким чином, щоб була регулююча напруга необхідно полярності. Вихідний опір ППН бажано мати якомога меншим (для виключення додаткової інерційної ланки), тому іноді як вихідний каскад ППН використовують еміттерний повторювач або каскад із глибоким негативним зворотним зв'язком по напрузі [9].
2. Методика розрахунку зворотньої системи АРП
Система АРП зворотнього регулювання представляє собою не лінійну систему автоматичного регулювання. Процеси в такій системі описуються нелінійними диференційними рівняннями. Рішення цього рівняння дуже громіздке та важке, але воно суттєво спрощується при лінійній і експонціальній апроксимації регулюючо характеристики. РХ Близька до лінійній РХ властива регулюємим каскадам на польових біполярних транзисторах, а також багатьом потенціометричним регуляторам властивих РХ, близько до експоненціальним[15].
При лінійній апроксимації РХ змінючим в процесі АРП коефіцієнт підсилення (передачі)
![]() , (2)
, (2)
де ![]() коефіцієнт підсилення РП при управляючим напругою
коефіцієнт підсилення РП при управляючим напругою ![]() ;
;
![]() -
значення
-
значення ![]() , при
короткій
, при
короткій ![]() вертається
в нуль.
вертається
в нуль.
В реальних схемах глубина регулювання обмежена, тому ![]() не
бува рівним нулю. Робоча ділянка характеристики
не
бува рівним нулю. Робоча ділянка характеристики ![]() розташовується
віще осі напруги . Зверху він обмежений найбільшим підсиленням (
розташовується
віще осі напруги . Зверху він обмежений найбільшим підсиленням (![]() .
.
Ампітудна характеристика пристроїв з АРП. Амплітуда вихідної напруги підсилювача с лінійною РХ
![]() . (3)
. (3)
При ![]() асимптотично
прямує до
асимптотично
прямує до ![]() при
незатриманій АРП і до
при
незатриманій АРП і до ![]() при
затриманій АРП. В цьому випадку
при
затриманій АРП. В цьому випадку ![]() -
статичний коефіцієнт передачі ланцюга зворотньому зв’язку;
-
статичний коефіцієнт передачі ланцюга зворотньому зв’язку; ![]() –коефіцієнт
підсилення підсилювача АРП;
–коефіцієнт
підсилення підсилювача АРП; ![]() коефіцієнт передачі детектора АРП;
коефіцієнт передачі детектора АРП; ![]() коефіцієнт передачі фільтру АРП;
коефіцієнт передачі фільтру АРП; ![]() -
напруга затримки АРП.
-
напруга затримки АРП.
В реальних системах при великих вхідних сигналах амплітудні характеристики
також проходять полого, наближаючись до вказаних значень, до тих пір, поки не
виникнуть значні нелінійні викривлення або перегрузки яких-небудь елементів РП
або ланцюгу зворотного зв’язку, або поки не призупиниться зменшення ![]() .
Після цього крутизна амплітудної характеристики різко зростає , або досягає постійност
завдяки обмеження сигналу. В діапазоні
.
Після цього крутизна амплітудної характеристики різко зростає , або досягає постійност
завдяки обмеження сигналу. В діапазоні ![]() вихідна
напруга змінюється по закону[15]
вихідна
напруга змінюється по закону[15]
 . (4)
. (4)
Перехідний процес в системі АРП. При змінені любого
параметру РП та ланцюгу зворотнього зв’язку в пристроях с АРП виника
перехідний процес, по закінченню якого встановлюються статистичні значення
керованих величин ![]() та
та ![]() .
Перехідний процес може мати коливальний характер, якщо неправильно вибрано
кількість ланків ФНЧ та їх параметрів. В цьому випадку неможливий нормальний
прийом сигналів.
.
Перехідний процес може мати коливальний характер, якщо неправильно вибрано
кількість ланків ФНЧ та їх параметрів. В цьому випадку неможливий нормальний
прийом сигналів.
Найбільше широко використовуються АРП першого порядку, в яких існую тільки одни елемент с постійною часу, значно перевищуючої постійні часу інших елементів. Звичайно таким елементом є одноланковий ФНЧ включений на виході без нерційного детектора системи АРП. Перехідний процес АРП першого порядку монотонний.
Якщо задана довжина перехідного процесу в системі АРП tАРП при перепаді амплітуди D п , то максимально допустиме значення постійної часу ланцюгу АРП можливо вибрати з умов:
![]() , (5)
, (5)
де ![]() коефіцієнт інтенсивності зворотнього зв’язку;
коефіцієнт інтенсивності зворотнього зв’язку; ![]() -
крутизна РХ;
-
крутизна РХ; ![]() -
коефіцієнт передачі ланцюга зворотнього зв’язку;
-
коефіцієнт передачі ланцюга зворотнього зв’язку; ![]() -
амплітуда вхідного сигналу.
-
амплітуда вхідного сигналу.
Коефіцієнт ![]() відповіда
заданому значенню перепаду
відповіда
заданому значенню перепаду ![]() амплітуд
сигналу відносно мінімальної амплітуди
амплітуд
сигналу відносно мінімальної амплітуди ![]() , при
якій починає робити система АРП та
, при
якій починає робити система АРП та ![]() .
Значення
.
Значення ![]() знаходить
розрахунок, якщо відома аналітична залежність
знаходить
розрахунок, якщо відома аналітична залежність ![]() (
(![]() ), або
з графіка залежності
), або
з графіка залежності ![]() (
(![]() ),
який легко побудувати, використовуючи графік РП.
),
який легко побудувати, використовуючи графік РП.
Викривлення модулюючого сигналу в приймачі з АРП. При не великій постійній часу виникають частотні, фазові і нелінійні викривлення модулюючого сигналу в приймачах сигналів з АМ. Рівень викривлення залежить від напруги сигналу на вході.
Мінімальне допустиме значення постійної часу ФНЧ визначається рівнянням
![]() , (6)
, (6)
де ![]() представля
собою найменше з чисел
представля
собою найменше з чисел
![]() , (7)
, (7)
![]() допустиме значення глубини модуляції;
допустиме значення глубини модуляції; ![]() -
допустиме значення коефіцієнта гармонік;
-
допустиме значення коефіцієнта гармонік; ![]() -
допустиме значення фазового здвигу. Значення
-
допустиме значення фазового здвигу. Значення ![]() ,
, ![]() ,
, ![]() , задають
на мінімальній частоті модулюючого сигналу
, задають
на мінімальній частоті модулюючого сигналу ![]() .
Максимальне значення
.
Максимальне значення ![]() визначають
з графіку залежності
визначають
з графіку залежності ![]() (
(![]() ) [15].
) [15].
Методика розрахунку. Вихідні данні: границя зміни напруги сигналу на вході приймача, допустимі границі зміни напруги сигналу на виході. Крім того, можуть бути задані швидкодія системи, рівень вносимих перехресних та лінійних викривлень модулюючого сигналу, допустимі зміни АЧХ АРП та ін. На етапі розробки структурної схеми приймача вибирають спосіб регулювання підсилення, кількість регулюємих каскадів та ділення напруги. Ретельний розрахунок системи АРП виконують після електричного розрахунку РП в начальному режимі.
Порядок розрахунку[15]:
1. Вибирають кількість регулюємих каскадів, враховуючи, що один каскад дозволяє отримати глубину регулювання від 15 до 25 дБ ( в залежності від вимог до стабільності його показників) . При цьому щоб запобігти значних нелінійних викривлень напруги сигналу на вході каскадів не повинно перевищування значення порядку 10 мВ. Якщо в приймачі каскадів УСЧ та ППЧ недостатньо для отримання заданої глубини регулювання, тоді можливо допоміжньо застосовувати регульовані дільники напруги.
2.
Вибирають граничн
значення струму колектора ![]() та
та ![]() ,
враховуючи, що для підвищення ефективності регулювання необхідно змінити
,
враховуючи, що для підвищення ефективності регулювання необхідно змінити ![]() в
широких межах, а для покращення інших показників данні межі слід обмежити. Треба
вважати, що допустиме значення
в
широких межах, а для покращення інших показників данні межі слід обмежити. Треба
вважати, що допустиме значення ![]() в
високочастотних транзисторах малої потужності не перевищує 3…5 мА. Звичайно
вибирають
в
високочастотних транзисторах малої потужності не перевищує 3…5 мА. Звичайно
вибирають ![]() = 1…2
мА. Струм
= 1…2
мА. Струм ![]() в
кінцевих каскадах ППЧ повинен бути не менше 0,25…0,3 мА, а в інших каскадах
детекторного тракта – не менше 0,1…0,2 мА. Приведені значення являються ориєнтованими
та залежать від конкретних умов. Звичайно
в
кінцевих каскадах ППЧ повинен бути не менше 0,25…0,3 мА, а в інших каскадах
детекторного тракта – не менше 0,1…0,2 мА. Приведені значення являються ориєнтованими
та залежать від конкретних умов. Звичайно ![]()
![]()
3.
Визначають коефіцієнт ![]() для
кожного транзистора.
для
кожного транзистора.
4. На основі результатів розрахунку РП завдяки формул
![]() ,
,
![]() ,
,
![]() .
.
Визначають максимальне та мінімальне значення добутків коефіцієнтів підсилення всіх регулюємих каскадів.
5. Знаходять значення глибини регулювання за формулою
![]() .
Враховуючи розкид параметрів транзисторів та погрішності розрахунку, зменшують
отримане значення на 2…4 дБ. Якщо отримане значення
.
Враховуючи розкид параметрів транзисторів та погрішності розрахунку, зменшують
отримане значення на 2…4 дБ. Якщо отримане значення ![]() буде
меншим
буде
меншим ![]() розрахованого
за формулою
розрахованого
за формулою ![]() необхідно
збільшувати кількість регулюємих каскадів, якщо це можливо, або зменшити
необхідно
збільшувати кількість регулюємих каскадів, якщо це можливо, або зменшити ![]() (в
допустимих значеннях). Якщо і це не дає бажаного результату, тоді слід
примінити допоміжне шунтування або відмовитись від регулювання зміни режиму та
примінити регулюємі дільники напруги.
(в
допустимих значеннях). Якщо і це не дає бажаного результату, тоді слід
примінити допоміжне шунтування або відмовитись від регулювання зміни режиму та
примінити регулюємі дільники напруги.
6.
При розрахунку динамічного
режиму системи АРП необхідно визначити постійну часу фільтру АРП ![]() та
уточнити значення
та
уточнити значення ![]() та
кількість регулюємих каскадів, враховуючи вимоги до перехідного процесу та
допустимі викривлення модулюючого сигналу.
та
кількість регулюємих каскадів, враховуючи вимоги до перехідного процесу та
допустимі викривлення модулюючого сигналу.
7.
Якщо в приймальному
пристрої з АРП необхідно одночасно зберегти з високою точністю закон модуляц
та отримати малу постіну часу для встановлення перехідних процесів, тод
одночасно повинні виконуватись вимоги![]() ,
, ![]() . В
ншому випадку необхідно відкоректувати розрахунок стаціонарного режиму,
змінивши початкові данні, або застосувавши в системі АРП більш складний ФНЧ,
наприклад двухланковий [15].
. В
ншому випадку необхідно відкоректувати розрахунок стаціонарного режиму,
змінивши початкові данні, або застосувавши в системі АРП більш складний ФНЧ,
наприклад двухланковий [15].
Висновок
1. Зроблено аналіз показників та характеристик існуючих функціональних схем систем АРП.
2. Проведений порівняльний аналіз між аналоговими та цифровими системами АРП, визначено ряд переваг цифрових АРП над аналоговими:
- незалежність тривалості процесу встановлення необхідного підсилення від рівня вхідного сигналу;
- незалежність регулюючих характеристик від розбросів і конкретних властивостей ланцюга АРП і регулюємого підсилювача (при цілком цифровому виконанні);
- можливість встановлення необхідного підсилення після прийому першого імпульсу;
- астатизм і збереження встановленого підсилення при перервах у прийомі сигналу.
3. Приведені конкретн приклади регулювання підсилення та принципові схеми регулювання підсилення в системах АРП.
4. Спираючись на проведений аналіз різних схем АРП була синтезована схема ЦАРП, яка задовольняє вимогам сучасного розвитку систем РР зв’язку.
5. Приведено методику розрахуноку зворотньої системи АРП.
© 2010 Интернет База Рефератов