
Рефераты по сексологии
Рефераты по информатике программированию
Рефераты по биологии
Рефераты по экономике
Рефераты по москвоведению
Рефераты по экологии
Краткое содержание произведений
Рефераты по физкультуре и спорту
Топики по английскому языку
Рефераты по математике
Рефераты по музыке
Остальные рефераты
Рефераты по авиации и космонавтике
Рефераты по административному праву
Рефераты по безопасности жизнедеятельности
Рефераты по арбитражному процессу
Рефераты по архитектуре
Рефераты по астрономии
Рефераты по банковскому делу
Рефераты по биржевому делу
Рефераты по ботанике и сельскому хозяйству
Рефераты по бухгалтерскому учету и аудиту
Рефераты по валютным отношениям
Рефераты по ветеринарии
Рефераты для военной кафедры
Рефераты по географии
Рефераты по геодезии
Рефераты по геологии
Рефераты по геополитике
Рефераты по государству и праву
Рефераты по гражданскому праву и процессу
Рефераты по делопроизводству
Рефераты по кредитованию
Рефераты по естествознанию
Рефераты по истории техники
Рефераты по журналистике
Рефераты по зоологии
Рефераты по инвестициям
Рефераты по информатике
Исторические личности
Рефераты по кибернетике
Рефераты по коммуникации и связи
Контрольная работа: Анализ линейных стационарных объектов
Контрольная работа: Анализ линейных стационарных объектов
Анализ стационарных и динамических объектов
1. Задание на контрольную работу
Анализ линейных стационарных объектов
Цель работы: исследовать параметры линейных стационарных объектов, описываемых системами линейных алгебраических уравнений, используя для их решения средства матричной алгебры и специальные функции системы математических расчетов MathCAD.
Последовательность выполнения работы
1. Согласно номеру варианта (две последние цифры номера зачетной книжки) выбрать из табл.1.1. значения параметров для линейного объекта.
2. По формулам
в1і= в1+h(і-1) ;
в2і= в2+h(і-1) ;
для і=1,….5 определить значения коэффициентов, определяющих выходные значения объекта для пяти рассматриваемых случаев.
3. Составить и отладить программу решения системы линейных уравнений согласно Приложению 1.1 и для полученных в пункте 2 значений выхода найти пять наборов значений входных переменных х1 и х2 .
4. По результатам просчета на ПЭВМ построить таблицы значений входа (х1 и х2) при заданных значениях выхода ( в1 и в2).
5. Построить графики изменения значений х1 и х2 в зависимости от значений
в1 и в2.
|
Номер варианта |
Задание Коэффициенты системы уравнений
a11 a12 a21 a22 b1 b2 h |
||||||
| 5 | 2 | 1 | 1 | 2 | 3 | 2 | 0,1 |
2. Пояснительная записка
1) Выбрали вариант №5.
2) Выполняем пункт №2.
Запускаем программу “Mathcad v11.0a”.
Сохраняем созданный программой файл под именем 5_1zad_i1.mcd (File->Save As…), в котором будем создавать листинг программы для выполнения 1 задания, где i=1.
По формулам
в1і= в1+h(і-1) ;
в2і= в2+h(і-1) ;
для і=1 определяем значения коэффициентов, определяющего выходные значения объекта для первого рассматриваемого случая.
|
|
|
|
3) Выполняем пункт №3.
Чтобы задать расположение элемента (выражения, объекта) в нужном месте рабочей области программы с помощью манипулятора (мышь) задаёте нужное положение курсора, который выглядит красным крестиком (смотрите п. 2 рис. 1). После чего начинаете ввод информации с клавиатуры или (и) пользуетесь визуальным выбором с помощью мыши команд в главном меню программы.
Ориентируясь на образец (Приложение 1.1) начинаем с клавиатуры вводить необходимые выражения, а также пользуясь манипулятором (мышь) для визуального выбора команд в нашей программе “Mathcad v11.0a”.
Чтобы ввести нижние индексы в выражении
![]()
надо нажать пиктограмму 4 (см. рис. 1) и после в появившемся окне
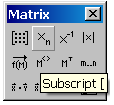
выбрать указанный элемент.
Чтобы ввести символ =”, например, в выражении
![]()
надо нажать пиктограмму 7 (см. рис. 1) и после в окне
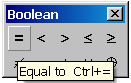
выбрать указанный элемент.
Чтобы ввести выражение с матрицей, например, в выражении

надо нажать пиктограмму 4 (см. рис. 1) и после в окне
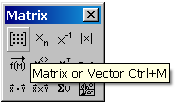
выбрать указанный элемент.
Выражение
![]()
- это матричная форма записи решения нашей системы линейных уравнений, где
![]()
это обратная матрица для матрицы А.
Чтобы ввести символы, текст выше буквы А надо нажать пиктограмму 4 (см. рис. 1) и после в окне
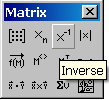
выбрать указанный элемент.
То, что мы набрали (листинг программы) в рабочей области программы для i=1 и сохранили в файле 5_1zad_i1.mcd можно просмотреть в файле 5_1zad_i1.rtf.
Аналогично, проводим расчеты для других значениё переменной i.
Для этого создаём копии файлов с разными именами, которые по содержанию отличаются лишь числовыми значениями параметров b1 и b2.
То, что мы набрали в рабочей области программы для i=2 и сохранили в файле 5_1zad_i2.mcd можно просмотреть в файле 5_1zad_i2.rtf.
То, что мы набрали в рабочей области программы для i=3 и сохранили в файле 5_1zad_i3.mcd можно просмотреть в файле 5_1zad_i3.rtf.
То, что мы набрали в рабочей области программы для i=4 и сохранили в файле 5_1zad_i4.mcd можно просмотреть в файле 5_1zad_i4.rtf.
То, что мы набрали в рабочей области программы для i=5 и сохранили в файле 5_1zad_i5.mcd можно просмотреть в файле 5_1zad_i5.rtf.
При изменении содержания листинга программа автоматически пересчитывает все промежуточные результаты и ответ. Чтобы задать пересчёт всех формул на странице листинга выбираем команду в программе (Tools->Calculate-> Calculate Worksheet).
4) Выполняем пункты №4 и №5.
В файле 5_1zad_tabl_graf.mcd создаём таблицу и графики (смотрите файл 5_1zad_tabl_graf.rtf).
Чтобы вставить таблицу надо нажать пиктограмму 15 (см. рис. 1). Задаём таблице имя А, вводим в не полученные данные. Чтобы по таблице построить графики создаём таблицу (В) только с числовыми данными (без первой строки в таблице А).
В выражении
![]()
цифра в угловых скобках означает массив даннях 2-го столбца таблицы (В).
Чтобы создать область для отображения графиков нажимаем пиктограмму 3 (см. Рис. 1).
Слева вводим имена зависимых переменных через запятую, а снизу вводим независимую переменную. Также предусмотрено задание числового интервала по осям ОХ и OY для отображения графиков.
Вывод: из полученных результатов видим, что вышеупомянутые зависимости линейны, так как графически мы получили прямые линии.
Задание на контрольную работу
по дисциплине “Основы системного анализа объектов и процессов компьютеризации ”
Анализ стационарных и динамических объектов
Этапы выполнения работы
изучить теоретические положения, раскрывающие структуру линейных и нелинейных стационарных и динамических объектов, математическое описание и решение задачи анализа такого рода объектов;
выполнить индивидуальное задание согласно предусмотренной последовательности выполнения работы;
оформить описание контрольной работы.
Перечень документов, входящих в контрольную работу
1. Задание на контрольную работу
2. Пояснительная записка
3. Приложения
Содержание пояснительной записки
Структуры исследуемых стационарных линейного, нелинейного и динамического объектов, их свойства, параметры и математическое описание. Решение задачи анализа объектов. Методы и алгоритмы решения систем линейных и нелинейных алгебраических уравнений, обыкновенных дифференциальных уравнений и систем уравнений. Описания программ решения в системе MathCAD. Выводы.
Примечание: объем пояснительной записки должен быть не менее 15 стр.
Состав приложений
Приложение 1. Листинг программы решения задачи анализа стационарного линейного объекта с графиками и комментариями, поясняющими использование в программе констант, переменных, массивов, векторов, матриц, функций и т.д.
Приложение 2. Листинг программы решения задачи анализа стационарного нелинейного объекта с графиками и комментариями, поясняющими использование в программе констант, переменных, массивов, векторов, матриц, функций и т.д.
Приложение 3. Листинг программы решения задачи анализа динамического объекта с графиками и комментариями, поясняющими использование в программе констант, переменных, массивов, векторов, матриц, функций и т.д.
1. Анализ линейных стационарных объектов
Цель работы: исследовать параметры линейных стационарных объектов, описываемых системами линейных алгебраических уравнений, используя для их решения средства матричной алгебры и специальные функции системы математических расчетов MathCAD.
Содержание работы:
1) изучить теоретические положения (раздел 1.1), раскрывающие структуру линейных объектов, их математическое описание и решение задачи анализа такого рода объектов;
2) выполнить индивидуальное задание согласно предусмотренной в разд.1.2 последовательности выполнения работы;
3) оформить описание раздела по контрольной работе согласно требованиям задания.
1.1. Краткие теоретические сведения
1.1.1. Иерархические уровни описания объектов
Описания технических объектов должны быть по сложности согласованы с возможностями восприятия человеком и возможностями оперирования описаниями в процессе их преобразования с помощью имеющихся средств проектирования. Однако выполнить это требование в рамках некоторого единого описания, не разделяя его на некоторые составные части, удается лишь для простых изделий. Как правило, требуется структурирование описаний и соответствующее разделение представлений о проектируемых объектах на иерархические уровни и аспекты.
Разделение описаний по степени детализации отображаемых свойств и характеристик объекта лежит в основе блочно-иерархического подхода к проектированию и приводит к появлению иерархических уровней в представлениях о проектируемом объекте.
На каждом иерархическом уровне используются свои понятия системы и элементов.
На уровне 1 (верхнем уровне) подлежащий проектированию сложный объект S рассматривается как система S из n взаимосвязанных и взаимодействующих элементов
Среди свойств объекта, отражаемых в описаниях на определенном иерархическом уровне, различают свойства систем, элементов систем и внешней среды, в которой должен функционировать объект. Количественное выражение этих свойств осуществляется с помощью величин, называемых параметрами. Величины, характеризирующие свойства системы, элементов системы и внешней среды, называют соответственно выходными, внутренними и внешними параметрами. Например, для электронного усилителя выходными параметрами являются полоса пропускания, коэффициент усиления; внутренними параметрами – сопротивления резисторов, емкости конденсаторов, параметры транзисторов; внешними параметрами – сопротивление и емкость нагрузки, напряжение источников питания.
Обозначим количества выходных Si. Каждый из элементов в описании уровня 1 представляет собой сложный объект, который, в свою очередь, рассматривается как система Si на уровне 2. Элементами систем Si являются объекты Sij, где j=1,2…, mi (mi – количество элементов в описании системы Si). Подобное разделение продолжается вплоть до получения на некотором уровне элементов, описания которых дальнейшему делению не подлежат. Такие элементы по отношению к объекту S называют базовыми элементами.
1.1.2. Классификация параметров объектов
Внутренних и внешних параметров через m, n, l, а векторы этих параметров соответственно через Y=(y1,y2,…,ym), X=(x1,x2,…,xn), Q=(q1,q2,…,ql). Свойства системы зависят от внутренних и внешних параметров, т.е. имеет место функциональная зависимость:
Y=F(X,Q). (1.1)
1.1.3. Структура и математическая модель объекта
Структура объекта это перечень типов элементов, составляющих объект, и способа связи элементов между собой в составе объекта.
Математическая модель (ММ) технического объекта – это система математических объектов (чисел, переменных, матриц, множеств и т.п.) и отношений между ними, отражающая некоторые свойства технического объекта. Наличие ММ позволяет легко оценивать выходные параметры по известным значениям векторов X и Q. Такая система соотношений (1) является примером математической модели объекта. Однако, существование зависимости (1.1) не означает, что она известна разработчикам и может быть представлена именно в таком явном относительно вектора Y виде. Как правило, ММ в виде (1.1) удается получить только для очень простых объектов. Типичной является ситуация, когда математическое описание процессов в проектируемом объекте задается моделью в форме системы уравнений.
Ряд технических объектов в установившемся (стационарном) состоянии (режиме) может быть описан системами линейных алгебраических уравнений.
Такого рода объекты (например, объект, показанный на рис 1.1) относятся к классу линейных стационарных объектов.
|
|
|
|
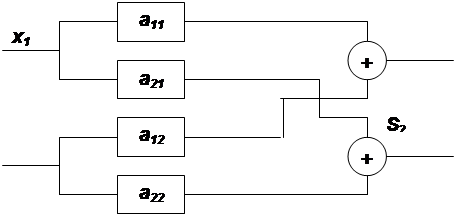
Рис. 1.1. Структура линейного стационарного объекта
Структура данного объекта определяется двумя сумматорами S1 и S2, четырьмя линейно– усилительными блоками а11 , а12 , а21 , а22 и системой связей между ними.
Математическая модель такого рода объекта представляет собой систему линейных алгебраических уравнений и имеет вид:
![]() а11х1
+а12х2=в1;
а11х1
+а12х2=в1;
а21х1 +а22х2=в2;
1.1.4. Анализ объектов
Задача анализа объектов состоит в определении свойств и исследовании работоспособности объекта по его описанию.
При одновариантном анализе задаются значения внутренних и внешних параметров, требуется определить значения выходных параметров объекта.
При одновариантном анализе задается также некоторая точка в пространстве внутренних параметров и требуется в этой точке определить значения выходных параметров. Подобная задача обычно сводится к однократному решению уравнений, составляющих математическую модель, что и обусловливает название этого вида анализа.
Многовариантный анализ заключается в исследовании свойств объекта в некоторой области пространства внутренних параметров. Такой анализ требует многократного решения систем уравнений (многократного выполнения одновариантного анализа).
Задача, ставящаяся при анализе (исследовании) такого рода объектов (рис 1.1), может иметь следующий вид: необходимо определить значения входных воздействий х1 и х2 при заданной структуре объекта, определяемой системой связей, и заданных значениях внутренних параметров, при которых выход объекта имел бы требуемые выходные значения в1 и в2 .
1.1.5. Решение систем линейных алгебраических уравнений
1.1.5.1. Постановка задачи. Система n линейных алгебраических уравнений (СЛАУ) с n неизвестными
имеет вид:
![]()
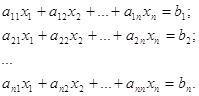 (1.2)
(1.2)
![]() неизвестные числа, подлежащие определению;
неизвестные числа, подлежащие определению;
![]() – коэффициенты
системы;
– коэффициенты
системы;
![]() – свободные
члены.
– свободные
члены.
Первый индекс коэффициента указывает номер уравнения, в котором фигурирует данный коэффициент (номер строки), а второй – номер неизвестного, при котором этот коэффициент поставлен (номер столбца). Коэффициенты системы, как и свободные члены, предполагаются известными.
Решением системы (или ее корнями)
называется всякая совокупность чисел, ![]() ,
которая, будучи подставлена в систему вместо неизвестных
,
которая, будучи подставлена в систему вместо неизвестных ![]() ,
обращает все уравнения системы в тождества. Отметим, что совокупность чисел
,
обращает все уравнения системы в тождества. Отметим, что совокупность чисел ![]() составляет
одно решение системы, а не n решений.
составляет
одно решение системы, а не n решений.
В матричной форме система может быть записана как
![]()
![]()
![]()
![]()
![]()
![]() (1.3)
(1.3)
или в обобщенной форме:
![]() (1.4)
(1.4)
1.1.5.2. Классификация методов решения. На практике применяют два типа методов:
– прямые или точные;
– итерационные.
Точные это методы, которые дают решение задачи с помощью конечного числа элементарных арифметических операций. Число необходимых для решения задач вычислительных операций зависит только от вида вычислительной схемы и от порядка матрицы. К точным методам относится метод Гаусса.
Решение СЛАУ итерационными методами получается как предел последовательных приближений, вычисляемых некоторым единообразным процессом. Число арифметических операций в данном случае зависит от вычислительной схемы, порядка матрицы и от требуемой точности. Примером итерационных методов является метод простой итерации.
На практике чаще всего применяются прямые методы (метод Гаусса). Однако, при решении на ЭВМ систем высокого порядка (более 200 уравнений в системе), предпочтительными являются итерационные методы.
Реализация решения задачи анализа линейного стационарного объекта может быть осуществлена с помощью средств матричной алгебры пакета MathCAD.
1.2. Последовательность выполнения работы
1. Согласно номеру варианта (две последние цифры номера зачетной книжки) выбрать из табл.1.1. значения параметров для линейного объекта.
По формулам
в1і= в1+h(і-1) ;
в2і= в2+h(і-1) ;
2. Для і=1,….5 определить значения коэффициентов, определяющих выходные значения объекта для пяти рассматриваемых случаев.
3. Составить и отладить программу решения системы линейных уравнений согласно Приложению 1.1 и для полученных в пункте 2 значений выхода найти пять наборов значений входных переменных х1 и х2 .
4. По результатам просчета на ПЭВМ построить таблицы значений входа (х1 и х2) при заданных значениях выхода ( в1 и в2).
5. Построить графики изменения значений х1 и х2 в зависимости от значений в1 и в2.
Таблица 1.1
|
Номер варианта |
Задания Коэффициенты системы уравнений
a11 a12 a21 a22 b1 b2 h |
||||||
| 1 | 1 | 2 | 3 | 4 | 1 | 2 | 0,1 |
| 2 | 2 | 1 | 4 | 3 | 2 | 1 | |
| 3 | 1 | 1 | 3 | 2 | 3 | 1 | |
| 4 | 3 | 2 | 1 | 1 | 3 | 1 | |
| 5 | 2 | 1 | 1 | 2 | 3 | 2 | |
|
6 |
1 |
2 |
2 |
1 |
2 |
3 |
|
| 7 | 4 | 3 | 1 | 2 | 3 | 3 | |
| 8 | 1 | 3 | 3 | 5 | 2 | 2 | |
| 9 | 2 | 3 | 1 | 4 | 1 | 1 | |
| 10 | 2 | 3 | 3 | 2 | 4 | 1 | |
| 11 | 1 | 2 | 2 | 5 | 4 | 3 | |
| 12 | 6 | 3 | 4 | 7 | 4 | 2 | |
| 13 | 1 | 5 | 2 | 3 | 4 | 4 | |
| 14 | 1 | 2 | 3 | 4 | 1 | 4 | |
| 15 | 2 | 3 | 4 | 1 | 2 | 4 | |
| 16 | 3 | 2 | 1 | 4 | 3 | 4 | |
| 17 | 2 | 3 | 1 | 4 | 5 | 1 | |
| 18 | 3 | 1 | 4 | 2 | 5 | 2 | |
| 19 | 1 | 4 | 2 | 3 | 5 | 3 | |
| 20 | 2 | 3 | 2 | 5 | 5 | 4 | |
| 21 | 3 | 2 | 5 | 3 | 4 | 5 | |
| 22 | 4 | 1 | 6 | 2 | 3 | 5 | |
| 23 | 5 | 3 | 4 | 1 | 2 | 5 | |
| 24 | 1 | 4 | 5 | 2 | 1 | 5 | |
| 25 | 1 | 4 | 6 | 2 | 3 | 1 | |
| 26 | 2 | 4 | 5 | 3 | 3 | 2 | |
| 27 | 3 | 4 | 3 | 5 | 1 | 6 | |
| 28 | 3 | 5 | 2 | 1 | 2 | 6 | |
| 29 | 4 | 5 | 1 | 3 | 3 | 6 | |
| 30 | 5 | 4 | 3 | 2 | 6 | 1 | |
2. Анализ нелинейных стационарных объектов
Цель работы: исследовать параметры нелинейных стационарных объектов, описываемых системами нелинейных алгебраических уравнений, используя для их решения средства пакета MathCAD.
Содержание работы:
1) изучить теоретические положения (раздел 2.1), раскрывающие структуру нелинейных стационарных объектов, их математическое описание и пример решения систем нелинейных алгебраических уравнений средствами пакета MathCAD, используемый для анализа такого рода объектов;
2) выполнить индивидуальное задание согласно предусмотренной в разд.2.2 последовательности выполнения работы;
3) оформить описание раздела по контрольной работе согласно требованиям задания.
2.1. Краткие теоретические сведения
Структура и математическая модель объекта
Структурная схема нелинейного стационарного объекта имеет вид:
|
|
|
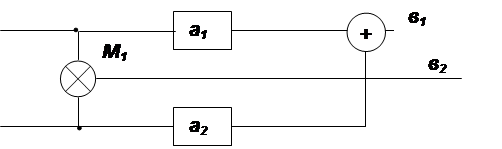
Такой объект представляет собой систему, которая имеет два входа х1 и х2 с постоянными значениями в установившемся режиме и два выхода в1 и в2. Структура объекта определяется сумматором S1 , умножителем М1, двумя линейно– усилительными блоками а1 , а2 и системой связей между ними.
В отличие от линейных стационарных объектов нелинейные описываются системами нелинейных алгебраических уравнений.
Математическая модель, соответствующая такой схеме, имеет вид:
![]() а1х1
+а2х2=в1;
а1х1
+а2х2=в1;
х1х2=в2
2.1.2. Анализ объектов
Исследование такого рода объектов состоит в определении значений входных воздействий х1 ,х2 в зависимости от значений выходов в1 и в2 при заданных параметрах объекта а1 и а2 .
Реализация решения задачи исследования нелинейного стационарного объекта в такой постановке может быть осуществлена с помощью средств системы символьной математики MathCAD 7.0 PRO .
2.1.3. Решение нелинейных алгебраических и трансцендентных уравнений
2.1.3.1. Постановка задачи. Пусть дано уравнение
![]() , (2.1)
, (2.1)
где функция ![]() определена
и непрерывна на некотором интервале (А,В). Всякое значение
определена
и непрерывна на некотором интервале (А,В). Всякое значение ![]() ,
обращающее функцию
,
обращающее функцию ![]() в нуль, то есть
такое, при котором
в нуль, то есть
такое, при котором ![]() , называется
корнем уравнения (2.1), а процесс нахождения
, называется
корнем уравнения (2.1), а процесс нахождения ![]() называется
его решением.
называется
его решением.
Если функция ![]() представляет
собой многочлен относительно
представляет
собой многочлен относительно ![]() , то уравнение
называется нелинейным алгебраическим (например,
, то уравнение
называется нелинейным алгебраическим (например, ![]() );
если в функцию
);
если в функцию ![]() входят
элементарные (тригонометрические, логарифмические, показательные и т.п.)
функции, то такое уравнение называется трансцендентным (например,
входят
элементарные (тригонометрические, логарифмические, показательные и т.п.)
функции, то такое уравнение называется трансцендентным (например, ![]() ).
).
2.1.3.2. Характеристика методов. Методы решения нелинейных алгебраических и трансцендентных уравнений (НАТУ) делятся на прямые и итерационные. Первые позволяют найти решение непосредственно с помощью формул и всегда обеспечивают получение точного решения. Однако прямые методы имеются только для ограниченного круга уравнений, поэтому на практике более широко используются итерационные методы.
В итерационных методах процедура решения задается в виде многократного применения некоторого алгоритма. Полученное решение всегда является приближенным, хотя может быть сколь угодно близким к точному.
В общем случае задача решается в 2 этапа:
определение приближенных значений корней уравнения;
уточнение корней до заданной степени точности с помощью одного из итерационных методов.
Для определения приближенных значений корней уравнения используются:
1) Построение графика функций ![]() и
приближенное определение точек, где кривая пересекает ось Х.
и
приближенное определение точек, где кривая пересекает ось Х.
Запись уравнения ![]() в
виде
в
виде ![]() и
построение графиков двух функций:
и
построение графиков двух функций: ![]() и
и
![]() .
Точка их пересечения и есть корень исходного уравнения (5.1).
.
Точка их пересечения и есть корень исходного уравнения (5.1).
На втором этапе происходит уточнение корня с использованием критерия окончания итерационного процесса.
Итерационный процесс следует
оканчивать, когда ![]() <
< ![]() ,
т.е. при близости двух последовательных приближений к корню.
,
т.е. при близости двух последовательных приближений к корню.
Одним из итерационных методов для уточнения корня является метод Ньютона.
2.1.3.3. Метод Ньютона
2.1.3.3.1. Геометрическая интерпретация метода Ньютона.
Приняв в качестве начального
приближения к корню ![]() некоторое
значение
некоторое
значение ![]() , восстанавливаем перпендикуляр в
точке
, восстанавливаем перпендикуляр в
точке ![]() к
оси Х. В точке пересечения перпендикуляра с графиком функции
к
оси Х. В точке пересечения перпендикуляра с графиком функции ![]() ,
для которой отыскивается нуль, проводим касательную к кривой. Точка пересечения
касательной с осью Х дает новое приближение
,
для которой отыскивается нуль, проводим касательную к кривой. Точка пересечения
касательной с осью Х дает новое приближение ![]() к
корню. После этого процесс повторяем для точки
к
корню. После этого процесс повторяем для точки ![]() ,
получаем точку
,
получаем точку ![]() и т.д.
и т.д.
2.1.3.3.2. Получение формулы Ньютона. Определим рекуррентное соотношение для нахождения корня методом Ньютона.
Уравнение касательной в точке ![]() можно
получить как уравнение прямой, проходящей через заданную точку
можно
получить как уравнение прямой, проходящей через заданную точку ![]() и
имеющей угловой коэффициент
и
имеющей угловой коэффициент ![]() :
:
![]()
В точке ![]() пересечения
касательной с осью Х, величина
пересечения
касательной с осью Х, величина ![]() равняется нулю:
равняется нулю:
![]()
Отсюда
![]()
В общем случае для вычисления
последующего приближения ![]() к корню по
известному предыдущему
к корню по
известному предыдущему ![]() формула Ньютона
имеет вид:
формула Ньютона
имеет вид:
![]()
К такому же результату можно придти, используя разложение в ряд Тейлора:
![]()
Члены, содержащие ![]() во
второй и более высоких степенях, отбрасываются; используется соотношение
во
второй и более высоких степенях, отбрасываются; используется соотношение ![]() .
Предполагается, что переход от
.
Предполагается, что переход от ![]() к
к ![]() приближает
значение функции к нулю так, что
приближает
значение функции к нулю так, что ![]() т.е.
точка
т.е.
точка ![]() выбирается
такой, что значение функции в ней равняется нулю:
выбирается
такой, что значение функции в ней равняется нулю:

Полученная точка ![]() является
точкой пересечения касательной в точке
является
точкой пересечения касательной в точке ![]() с
осью Х. Поскольку кривая
с
осью Х. Поскольку кривая ![]() отлична от
прямой, то значение функции
отлична от
прямой, то значение функции ![]() скорее всего не
будет в точности равно нулю (это результат отбрасывания членов высшего порядка
в ряде Тейлора). Поэтому вся процедура повторяется, причем вместо
скорее всего не
будет в точности равно нулю (это результат отбрасывания членов высшего порядка
в ряде Тейлора). Поэтому вся процедура повторяется, причем вместо ![]() используется
используется
![]() .
.
Одно из преимуществ метода Ньютона это то, что его можно распространить на решение систем нелинейных уравнений со многими переменными.
2.1.4. Решение систем нелинейных алгебраических и трансцендентных уравнений
2.1.4.1. Постановка задачи. Система n нелинейных уравнений с n неизвестными имеет вид:
 (2.2)
(2.2)
где ![]() неизвестные;
неизвестные;
![]() – заданные
функции n переменных.
– заданные
функции n переменных.
Решением системы НАТУ называется
совокупность чисел ![]() , которые,
будучи поставлены на место неизвестных
, которые,
будучи поставлены на место неизвестных ![]() ,обращают
каждое уравнение системы в тождество. Система (2.2) может иметь несколько
решений. Нахождение решения системы уравнений является значительно более
сложной задачей, чем решение одного уравнения. Для систем НАТУ не существует
каких–либо приемов, используя которые получали бы приближенные значения корней.
В некоторых случаях в результате построения графиков с последующим определением
координат точек пересечения можно получить приближенные значения корней. Для
уточнения корней всегда применяются итерационные методы, чаще всего метод
Ньютона.
,обращают
каждое уравнение системы в тождество. Система (2.2) может иметь несколько
решений. Нахождение решения системы уравнений является значительно более
сложной задачей, чем решение одного уравнения. Для систем НАТУ не существует
каких–либо приемов, используя которые получали бы приближенные значения корней.
В некоторых случаях в результате построения графиков с последующим определением
координат точек пересечения можно получить приближенные значения корней. Для
уточнения корней всегда применяются итерационные методы, чаще всего метод
Ньютона.
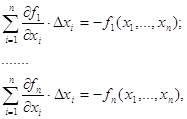
2.1.4.2. Метод Ньютона для решения систем НАТУ. Представим все n уравнений в виде рядов Тейлора:
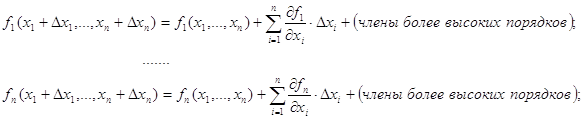 (2.3)
(2.3)
Задача сводится к отысканию такой
совокупности приращений ![]() , при которой
, при которой ![]() близки
к корню, т.е. левые части уравнений (2.3) обращаются в нули. Отбросив члены
более высоких порядков, получим систему линейных алгебраических уравнений
(СЛАУ) относительно
близки
к корню, т.е. левые части уравнений (2.3) обращаются в нули. Отбросив члены
более высоких порядков, получим систему линейных алгебраических уравнений
(СЛАУ) относительно ![]() :
:
 (2.4)
(2.4)
Систему линейных уравнений (5.4) можно записать в матричном виде:
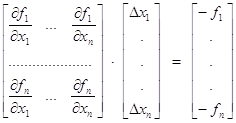 (2.5),
(2.5),
где матрица коэффициентов (А) состоит из частных производных функций по всем переменным, а вектор свободных членов (В) – из функций с противоположным знаком. Матрица в левой части (2.5) называется матрицей Якоби или якобианом.
Найденные из системы (2.5) значения
![]() используются
как поправки для получения очередного
используются
как поправки для получения очередного ![]() го приближения к решению:
го приближения к решению:
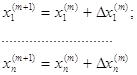 (2.6)
(2.6)
Таким образом, для выполнения одной
итерации методом Ньютона решают СЛАУ (2.5) относительно вектора поправок ![]() .
Получив значение вектора поправок
.
Получив значение вектора поправок ![]() (
(![]() ),
получим очередное приближение к корням
),
получим очередное приближение к корням ![]() (
(![]() )
(2.6) и т.д. до тех пор, пока все получаемые поправки
)
(2.6) и т.д. до тех пор, пока все получаемые поправки ![]() не
будут достаточно малы, что свидетельствует о близости приближенного решения к истинному
не
будут достаточно малы, что свидетельствует о близости приближенного решения к истинному
![]() (
(![]() ).
).
Следует обратить внимание на то,
что проверку поправок ![]() на каждом шаге
итерации на условие
на каждом шаге
итерации на условие ![]() <
<![]() (
(![]() )
необходимо выполнять для значений поправок всех корней (
)
необходимо выполнять для значений поправок всех корней (![]() .
.
Пример: Найти методом Ньютона решение системы уравнений
![]()
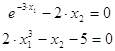
Решение.
Очевидно, 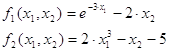
Для формирования матрицы Якоби получим частные производные:
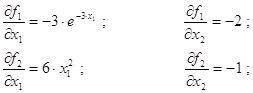
Подставив в (2.5) в качестве: матрицы коэффициентов (А) – частные производные функций и вектора свободных членов (В) – функции с противоположным знаком, получим запись СЛАУ в виде:
 (2.7)
(2.7)
Задавшись некоторым начальным
приближением ![]() (
(![]() )
и, подставив его вместо
)
и, подставив его вместо ![]() (
(![]() )
в систему (2.7), решим полученную систему линейных уравнений (например,
матричным способом
)
в систему (2.7), решим полученную систему линейных уравнений (например,
матричным способом ![]() ) и получим
значение поправок
) и получим
значение поправок ![]() . Если поправки
не будут достаточно малы (т.е. условие
. Если поправки
не будут достаточно малы (т.е. условие ![]() <
<![]() не
выполняется), то вычисляется очередное приближение к корням:
не
выполняется), то вычисляется очередное приближение к корням: 
С полученным ![]() затем
повторяют те же операции, что и с
затем
повторяют те же операции, что и с ![]() для
получения
для
получения ![]() и, если необходимо,
и, если необходимо, ![]() и
т.д. до тех пор, пока все получаемые поправки
и
т.д. до тех пор, пока все получаемые поправки ![]() не
будут достаточно малы, что свидетельствует о близости приближенного решения к
истинному.
не
будут достаточно малы, что свидетельствует о близости приближенного решения к
истинному.
2.2. Последовательность выполнения работы
Согласно номеру по списку группы выбрать из табл.2.1 значения параметров для нелинейного объекта. По формулам
в1і= в1–h(і-1) ;
в2і= в2–h(і-1) ;
для і=1,2,...5 определить значения коэффициентов, определяющих выход для пяти рассматриваемых случаев.
2. Составить и отладить программу решения системы нелинейных уравнений согласно Приложению 2.1 и для полученных в пункте 1 значений выхода найти пять наборов значений входных переменных х1 и х2 .
3. По результатам просчета на ПЭВМ получить таблицы значений входа (х1 и х2 ) при заданных значениях выхода ( в1 и в2).
4. Построить графики изменения значений х1 и х2 в зависимости от значений в1 и в2. .
Таблица 2.1
|
Номер по списку |
Задания Коэффициенты системы уравнений а1 х1+ а2 х2=в1; х1 х2=в2; а1 а2 в1 в2 h |
| 1 | 1 2 4 2 0.1 |
| 2 | 2 1 3 1 |
| 3 | 1 2 3 1 |
| 4 | 2 2 4 1 |
|
5 |
2 1 4 2 |
|
6 |
1 3 4 1 |
| 7 | 1 1 5 3 |
| 8 | 1 3 5 2 |
|
9 |
3 3 6 1 |
| 10 | 2 3 7 2 |
| 11 | 3 3 9 2 |
| 12 | 2 2 9 2 |
| 13 | 1 1 9 2 |
| 14 | 1 3 5 2 |
| 15 | 1 1 7 3 |
| 16 | 2 2 7 3 |
| 17 | 2 3 5 1 |
| 18 | 3 1 5 2 |
| 19 | 5 5 10 1 |
| 20 | 6 2 10 2 |
| 21 | 2 2 10 2 |
| 22 | 1 1 10 2 |
| 23 | 1 1 11 2 |
| 24 | 2 2 11 2 |
| 25 | 2 2 11 3 |
| 26 | 2 2 11 4 |
| 27 | 2 2 11 5 |
| 28 | 2 2 11 6 |
| 29 | 2 2 11 7 |
| 30 | 1 1 11 8 |
3. Анализ динамических объектов
Цель работы: исследовать свойства и поведение динамических объектов, описываемых системами обыкновенных нелинейных дифференциальных уравнений, используя для их решения средства пакета MathCAD.
Содержание работы:
1) изучить теоретические положения (раздел 3.1), определяющие структуру динамических объектов, их математическое описание и решение задачи анализа объектов, методы решения обыкновенных дифференциальных уравнений и систем уравнений;
2) выполнить индивидуальное задание согласно предусмотренной в разд.3.2 последовательности выполнения работы;
3) оформить описание контрольной работы согласно требованиям задания.
3.1. Краткие теоретические положения
3.1.1. Структура и математическая модель объекта
В общем случае под динамическими (нестационарными) объектами понимают такие объекты, состояние и поведение которых определяется временными характеристиками, т.е. является функцией времени.
Такого рода объекты могут быть
описаны системами нелинейных дифференциальных уравнений вида ![]()
где ![]() функционал, определяющий конкретный вид системы уравнений, которая описывает
структуру объекта;
функционал, определяющий конкретный вид системы уравнений, которая описывает
структуру объекта; ![]() – вектор
переменных, описывающий выходы объекта;
– вектор
переменных, описывающий выходы объекта; ![]()
![]() вектор
производных;
вектор
производных; ![]() – вектор внутренних параметров
уравнения, определяющий конкретную реализацию объекта при заданной его
структуре;
– вектор внутренних параметров
уравнения, определяющий конкретную реализацию объекта при заданной его
структуре; ![]() –
внешние (входные) воздействия на объект.
–
внешние (входные) воздействия на объект.
Системе уравнений вида:
![]()
![]()
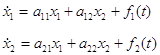
будет соответствовать структура объекта, изображенного на рис 3.1.
Структура объекта определяется интеграторами И1 и И2 , сумматорами S1, S2, S3, и S4, линейно– усилительными блоками а11 , а12 ,а21 ,а22 и системой связей между ними.
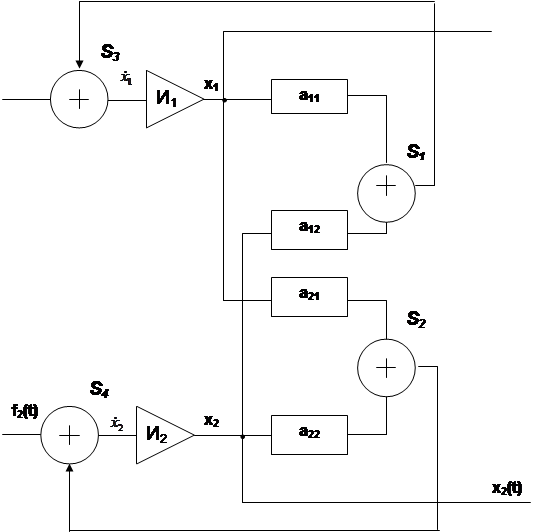
Рис 3.1. Структура динамического объекта.
3.1.2. Анализ динамических объектов
Задача анализа динамических объектов состоит в исследовании зависимости выходных значений объекта х1(t) и х2(t) как функции времени при заданных внешних (входных) воздействиях на объект f1(t) и f2 (t) и внутренних параметрах объекта а11 , а12 ,а21 ,а22 .
Решение задачи анализа состоит в
динамическом моделировании объекта, который описывается системой обыкновенных
дифференциальных уравнений, и заключается в решении (интегрировании) системы
уравнений на интервале времени. Этот интервал времени (от ![]() начального до
начального до ![]() – конечного) называется интервалом
интегрирования. В большинстве практических случаев
– конечного) называется интервалом
интегрирования. В большинстве практических случаев ![]() равно
нулю, то есть моделирование начинается в нулевой момент времени. В описании
такого рода систем переменная
равно
нулю, то есть моделирование начинается в нулевой момент времени. В описании
такого рода систем переменная ![]() называется
независимой, а все остальные переменные – зависимыми.
называется
независимой, а все остальные переменные – зависимыми.
3.1.3. Решение обыкновенных дифференциальных уравнений
Дифференциальными называются уравнения, содержащие одну или несколько производных. В зависимости от числа независимых переменных, и, следовательно, типа входящих в них производных, дифференциальные уравнения делятся на две категории:
обыкновенные дифференциальные уравнения (ОДУ), содержащие одну независимую переменную и производные по ней;
дифференциальные уравнения в частных производных (ДУЧП), содержащие несколько независимых переменных и производных по ним, которые называются частными производными.
Для решения дифференциальных уравнений могут применяться различного рода аналитические и численные методы. Аналитические методы основаны на прямых преобразованиях системы уравнений, приводящих к точному аналитическому решению. Однако такие методы сложны, не универсальны с точки зрения системы уравнений и приводят к решениям только в самых простых случаях. Поэтому они малоприемлемы при решении практических задач.
В последнее время в связи с бурным развитием вычислительной техники широкое применение получили численные методы решения дифференциальных уравнений. В основе этих методов лежит итерационное повторение однотипных вычислительных операций и поэтому они достаточно просто реализуются на ПЭВМ. Эти методы позволяют с заданной точностью находить на интервале интегрирования требуемое количество точек по времени для всех переменных, входящих в систему уравнений.
Среди этих методов можно выделить явные методы (метод Эйлера, метод Рунге–Кутта), простые в реализации. Количество проводимых вычислений для них зависит только от количества переменных и заданного количества точек определения значений переменных на интервале интегрирования. Точность вычисления результатов для этих методов значительно уменьшается при увеличении интервала интегрирования. Лишенной этого недостатка является группа неявных методов (методы прогноза и коррекции), но они обычно превосходят явные по количеству вычислений.
3.1.3.1. Численные методы решения обыкновенных дифференциальных уравнений
3.1.3.1.1. Решение задачи Коши. Дано обыкновенное дифференциальное уравнение первого порядка
![]()
Требуется найти решение ![]() этого
уравнения, удовлетворяющее начальному условию
этого
уравнения, удовлетворяющее начальному условию ![]() на
интервале
на
интервале ![]() .
.
Численное решение
задачи Коши состоит в нахождении значений ![]() в
точках
в
точках ![]() отрезка
отрезка ![]() ,
где
,
где ![]() – шаг интегрирования.
Число разработанных методов решения задачи Коши очень велико. Можно выделить
две группы методов:
– шаг интегрирования.
Число разработанных методов решения задачи Коши очень велико. Можно выделить
две группы методов:
Одношаговые методы, в которых для
нахождения следующей точки на кривой ![]() требуется
информация лишь об одном предыдущем шаге.
требуется
информация лишь об одном предыдущем шаге.
Одношаговыми являются метод Эйлера и методы Рунге–Кутта.
2. Многошаговые методы (методы
прогноза и коррекции), в которых для отыскания следующей точки кривой ![]() требуется
информация более чем об одной из предыдущих точек. К числу таких методов
относятся методы Милна, Хемминга, Адамса-Башфорта.
требуется
информация более чем об одной из предыдущих точек. К числу таких методов
относятся методы Милна, Хемминга, Адамса-Башфорта.
3.1.3.1.2. Метод Эйлера. Метод Эйлера – это простейший метод, позволяющий интегрировать дифференциальные уравнения первого порядка. Однако на основе этого метода легче понять алгоритмы других, более эффективных методов.
Метод Эйлера основан на разложении ![]() в
ряд Тейлора в окрестности
в
ряд Тейлора в окрестности ![]() .
.
Запишем ряд Тейлора:
![]()
При малом ![]() членами
высоких порядков можно пренебречь. Тогда:
членами
высоких порядков можно пренебречь. Тогда:
![]()
Таким образом, получим значение
зависимой переменной ![]() при малом
смещении
при малом
смещении ![]() от начальной точки
от начальной точки ![]() .
Этот процесс можно продолжить, используя соотношение
.
Этот процесс можно продолжить, используя соотношение
![]()
или
![]()
3.1.3.1.3.
Модифицированный метод Эйлера (метод Эйлера – Коши). Тангенс
угла наклона касательной к кривой ![]() известен
в
известен
в ![]() и
равен
и
равен ![]() ,
но он меняется с изменением независимой переменной, и в точке
,
но он меняется с изменением независимой переменной, и в точке ![]() наклон
касательной уже не такой, как в
наклон
касательной уже не такой, как в![]() , т.е. на
интервале
, т.е. на
интервале ![]() вносится погрешность.
вносится погрешность.
Точность метода Эйлера можно существенно повысить, улучшив аппроксимацию производной. Это можно сделать, использовав среднее значение производной в начале и конце интервала.
В модифицированном методе Эйлера сначала вычисляется значение функции в следующей точке по методу Эйлера.
![]() ,
,
которое используется для приближенного вычисления значения производной в конце интервала, т.е.
![]() .
.
Вычислив среднее значение
производной между полученным в начале и в конце интервала, найдем более точное
значение ![]() :
:
![]()
Принцип, на котором основан модифицированный метод Эйлера, можно пояснить иначе. Вернемся к разложению в ряд Тейлора:
![]()
Попытаемся сохранить член с ![]() ;
для этого
;
для этого ![]() аппроксимируем конечной разностью:
аппроксимируем конечной разностью:
![]()
Подставив это выражение в ряд Тейлора, получим:

Это выражение совпадает с ранее полученным.
Данный метод является методом
второго порядка, поскольку в нем используется член ряда Тейлора, содержащий ![]() .
.
3.1.3.1.4 Метод Рунге
Кутта. Точность одношаговых методов можно повысить, если
осуществить более точную аппроксимацию производной на интервале ![]() ,
т.е. использовать члены более высоких порядков в разложении Тейлора.
,
т.е. использовать члены более высоких порядков в разложении Тейлора.
Чтобы удержать в ряде Тейлора член ![]() го порядка, необходимо вычислять
го порядка, необходимо вычислять ![]() ю производную зависимой переменной. При использовании модифицированного метода
Эйлера для получения второй производной в конечно – разностной форме достаточно
было знать наклоны кривой на концах рассматриваемого интервала. Чтобы вычислить
третью производную в конечно– разностном виде, необходимо иметь значения второй
производной по меньшей мере в двух точках. Для этого необходимо дополнительно
определить наклон кривой в некоторой промежуточной точке интервала
ю производную зависимой переменной. При использовании модифицированного метода
Эйлера для получения второй производной в конечно – разностной форме достаточно
было знать наклоны кривой на концах рассматриваемого интервала. Чтобы вычислить
третью производную в конечно– разностном виде, необходимо иметь значения второй
производной по меньшей мере в двух точках. Для этого необходимо дополнительно
определить наклон кривой в некоторой промежуточной точке интервала ![]() ,
т.е. между
,
т.е. между ![]() и
и ![]() .
Очевидно, чем выше порядок вычисляемой производной, тем больше дополнительных
вычислений потребуется внутри интервала.
.
Очевидно, чем выше порядок вычисляемой производной, тем больше дополнительных
вычислений потребуется внутри интервала.
Метод Рунге-Кутта дает набор формул для расчета координат внутренних точек, требуемых для реализации этой цели.
Алгоритм Рунге-Кутта первого порядка является методом Эйлера.
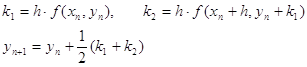
Алгоритм Рунге-Кутта второго порядка
является модифицированным методом Эйлера (методом Эйлера – Коши). Для
вычисления ![]() получаем формулы:
получаем формулы:
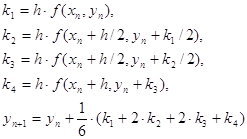
Наиболее распространенный вариант
метода – метод четвертого порядка точности. Для вычисления ![]() получаем формулы:
получаем формулы:
3.1.3.1.5
Автоматический выбор шага. В приведенных выше методах величина
шага изменения ![]() предполагалась
постоянной. Очевидно, что при интегрировании с малой величиной шага мы будем
получать более точное решение.
предполагалась
постоянной. Очевидно, что при интегрировании с малой величиной шага мы будем
получать более точное решение.
Однако, указать заранее приемлемую величину шага сложно. Если шаг выбрать большой, то будет недостаточной точность результатов. Если же шаг выбрать очень малый, то это увеличивает число шагов и время решения.
Поэтому некоторые программы интегрирования, применяемые на практике, снабжены процедурой автоматического выбора шага. В результате этого на участках плавного изменения интегральной кривой шаг автоматически увеличивается, а при резких изменениях функции шаг уменьшается.
3.1.3.1.6. Общая характеристика одношаговых методов. Чтобы получить информацию в новой точке, нужно иметь данные о предыдущей точке.
В основе всех одношаговых методов
лежит разложение функции в ряд Тейлора, в котором сохраняются члены, содержащие
степени до ![]() включительно. Целое число
включительно. Целое число ![]() называют
порядком метода. Погрешность на шаге имеет порядок
называют
порядком метода. Погрешность на шаге имеет порядок ![]() .
.
Все одношаговые методы не требуют действительного вычисления производных – вычисляется лишь сама функция (правая часть уравнения). Могут потребоваться значения функции в промежуточных точках, что влечет дополнительные затраты времени.
© 2010 Интернет База Рефератов