
Рефераты по сексологии
Рефераты по информатике программированию
Рефераты по биологии
Рефераты по экономике
Рефераты по москвоведению
Рефераты по экологии
Краткое содержание произведений
Рефераты по физкультуре и спорту
Топики по английскому языку
Рефераты по математике
Рефераты по музыке
Остальные рефераты
Рефераты по авиации и космонавтике
Рефераты по административному праву
Рефераты по безопасности жизнедеятельности
Рефераты по арбитражному процессу
Рефераты по архитектуре
Рефераты по астрономии
Рефераты по банковскому делу
Рефераты по биржевому делу
Рефераты по ботанике и сельскому хозяйству
Рефераты по бухгалтерскому учету и аудиту
Рефераты по валютным отношениям
Рефераты по ветеринарии
Рефераты для военной кафедры
Рефераты по географии
Рефераты по геодезии
Рефераты по геологии
Рефераты по геополитике
Рефераты по государству и праву
Рефераты по гражданскому праву и процессу
Рефераты по делопроизводству
Рефераты по кредитованию
Рефераты по естествознанию
Рефераты по истории техники
Рефераты по журналистике
Рефераты по зоологии
Рефераты по инвестициям
Рефераты по информатике
Исторические личности
Рефераты по кибернетике
Рефераты по коммуникации и связи
Реферат: Дифференциальные уравнения и описание непрерывных систем
Реферат: Дифференциальные уравнения и описание непрерывных систем
Министерство образования РФ
Южно-Уральский государственный университет
Кафедра Автоматики и управления
Реферат
по математическим основам теории систем
на тему
Дифференциальные уравнения и описание непрерывных систем
Выполнил:
Группа: ПС-263
Проверил: Разнополов О. А.
Челябинск
2003
Содержание:
Содержание 2
1. Появление дифференциальных уравнений при описании систем управления 3
2. Элементы теории дифференциальных уравнений 4
2.1. Понятие дифференциального уравнения 4
2.2. Нормальная система дифференциальных уравнений 4
2.3. Задача Коши 5
2.4. Свойства дифференциальных уравнений 6
2.5. Ломаная Эйлера и e-приближенное решение 6
2.6. Непрерывная зависимость решений от начальных условий и параметров 7
2.7. Линейные дифференциальные уравнения 8
2.7.1. Нормальная линейная система дифференциальных уравнений 8
2.7.2. Общее решение линейной однородной системы 9
2.7.3. Определитель Вронского. Формула Лиувилля 9
2.7.4. Линейная неоднородная система. Метод вариации произвольных постоянных 10
2.7.5. Формула Коши 12
2.7.6. Линейное уравнение n-го порядка 13
2.7.7. Линейное однородное дифференциальное уравнение с постоянными коэффициентами 14
2.7.8. Линейное неоднородное дифференциальное уравнение 15
3. Дифференциальные уравнения при описании непрерывных систем 16
3.1. Составление и линеаризация дифференциальных уравнений элементов системы 16
3.2. Понятие пространства состояний 18
3.3. Описание непрерывных систем с помощью системы дифференциальных уравнений 18
3.4. Описание систем переменными состояния 19
3.5. Понятие наблюдаемости системы 19
3.6. Понятие управляемости системы 20
3.7. Описание непрерывных систем с помощью одного дифференциального уравнения 21
3.8. Переход от системы дифференциальных уравнений к одному уравнению 22
3.9. Переход от одного уравнения к системе дифференциальных уравнений 22
Список литературы 24
1. Появление дифференциальных уравнений при описании систем управления
Любая система автоматического регулирования представляет совокупность отдельных взаимодействующих друг с другом элементов, соединенных между собой связями. Первым этапом при составлении дифференциальных уравнений систем автоматического регулирования является разделение системы на отдельные элементы и составление уравнений этих элементов. Эти уравнения могут быть интегральными, линейными, трансцендентными, но чаще всего это оказываются дифференциальные уравнения. Дифференциальные уравнения элементов и уравнения связей между отдельными элементами описывают процесс в системе, то есть изменение по времени всех координат системы.
Состояние системы, а также каждого входящего в нее элемента характеризуется некоторым числом независимых переменных. Этими переменными могут быть как электрические величины (ток, напряжение и т. д.), так и механические (скорость, угол поворота и т. д.). Обычно, чтобы характеризовать состояние системы или ее элемента, выбирают одну обобщенную координату на входе системы или элемента и одну – на выходе. Будем обозначать входную величину g(t), а выходную x(t). В ряде случаев такое представление невозможно, так как система или ее элемент могут иметь несколько входных и выходных величин. В многомерных системах можно рассматривать векторные входную и выходную величины с размерностями, совпадающими соответственно с числом входных и выходных элементов системы.
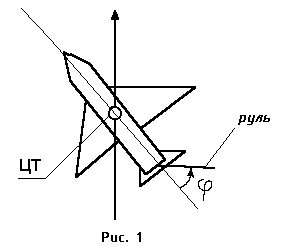
Рассмотрим пример: управление самолетом по углу рыскания. Предположим, что осевая линия самолета под действием порывов ветра отклонилась от заданного направления y на угол q (рис.1). Возвращение самолета на заданный курс осуществляется с помощью руля, отклонение которого равно j. Предполагается, что относительно оси, проходящей через центр тяжести ЦТ, самолет имеет момент инерции J. Восстанавливающая сила руля пропорциональна j, трением в воздухе пренебрегаем.
Уравнение движения запишется по второму закону Ньютона:
![]()
где kj(t) – восстанавливающая сила; m(t) – момент,
вызванный порывами ветра. Разделив это уравнение на J и обозначив b=–k/J, x(t)=m(t)/J, а также
принимая j(t) за управляющее воздействие u(t), получаем ![]()
Вводя в рассмотрение переменные состояния
![]()
к двум дифференциальным уравнениям первого порядка
![]()
которые в векторной форме запишутся так

Вводя векторно-матричные обозначения
приходим к дифференциальному уравнению:
![]()
2. Элементы теории дифференциальных уравнений
2.1. Понятие дифференциального уравнения
Уравнения, которые, кроме неизвестных функций одного или нескольких переменных, содержат также их производные, называются дифференциальными. Дифференциальные уравнения называются обыкновенными, если неизвестные функции являются функциями одного переменного, в противном случае дифференциальные уравнения называются уравнениями в частных производных.
Соотношение вида
![]()
называется дифференциальным уравнением n-го порядка. Решением дифференциального уравнения называется функция x=x(t), определенная на некотором интервале D't, которая, будучи подставлена в это уравнение, обращает его в тождество на всем интервале D. Это уравнение можно рассматривать как функцию, определяющую неявно производную n-го порядка x(n). При определенных условиях его можно решить относительно x(n):
![]()
Пусть x=x(t) – решение данного дифференциального уравнения. Тогда x(t) является непрерывной и непрерывно дифференцируемой функцией t. На плоскости (t,x) решению x=x(t) будет соответствовать непрерывная кривая, называемая интегральной кривой.
Функция x=x(t,C) называется общим решением дифференциального уравнения, если путем соответствующего выбора постоянной можно любую интегральную кривую.
2.2. Нормальная система дифференциальных уравнений
В дифференциальные уравнения вида
![]()
может входить n неизвестных функций x1,…, xn . Тогда системой дифференциальных уравнений будет совокупность соотношений

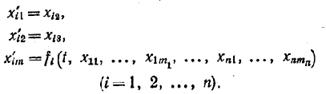
Предположим, что эту систему можно разрешить относительно старших производных. В этом случае получим систему уравнений:
![]()
Такая система называется канонической системой дифференциальных уравнений. Вводя новые неизвестные функции, можно привести эту систему к системе первого порядка. Пусть

Тогда наша система перепишется в виде
В дальнейшем будем рассматривать систему из n уравнений первого порядка в виде
![]()
Эта система называется нормальной (канонической) системой дифференциальных уравнений. Эту систему будем записывать в векторной форме:
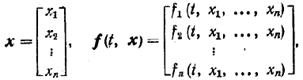
Тогда данная система будет представлена в виде:
![]()
Решением этой системы на интервале G называется совокупность n функций xi=xi(t), определенных на интервале G и таких, что подстановка их в эту систему обращает каждое ее уравнение в тождество на всем интервале G.
Если вектор-функция не зависит явно от времени t, то эта система называется автономной (стационарной).
Начальной задачей или задачей Коши для системы
![]()
называется следующая задача. Найти решение системы дифференциальных уравнений, определенное на некотором интервале G, содержащем точку t0, и удовлетворяющее условиям:
![]()
причем t0, xi0 (i=1, 2,…, n) называются начальными значениями для решения x1(t), …, xn(t), а эти условия – начальными условиями. Если ввести в рассмотрение (n+1)-мерное пространство с координатами t, x1,…, xn, то совокупность n функций xi=xi(t) будет представлять линию в n-мерном пространстве. Начальные значения t0, x10,…, xn0 представляют собой точку в этом пространстве.
2.4. Свойства дифференциальных уравнений
Пусть имеется нормальная система дифференциальных уравнений в векторной форме
![]() (1)
(1)
Общим решением системы (1) в области G называется совокупность n функций xi=xi(t,c1,…,cn), i=1,2,…,n. Будем говорить, что функция f(t,x1,…,xn) удовлетворяет условию Липшица в области G по переменным x1,…,xn, если существует такое постоянное число L>0, что для любой пары точек (t,x1,…,xn) и (t, xs1,…,xsn), принадлежащих G, выполняется неравенство
![]()
Пусть в системе (1) функции fi(t, x) непрерывны по t и удовлетворяют условию Липшица по x1,…,xn в некоторой области G. Тогда существует и притом единственное решение xi=xi(t), I=1,2,…n системы (1), удовлетворяющее начальным условиям xi(t0)=xi0, определенное на отрезке K, содержащем точку t0.
Теорема утверждает существование единственного решения на отрезке K, содержащем точку t0. Однако, это решение может быть продолжено за пределы отрезка K вплоть до границы области G.
Если функция f(t, x1, ..., хn) имеет ограниченные частные производные по xi в выпуклой области G, то эта функция удовлетворяет условию Липшица.
2.5. Ломаная Эйлера и e-приближенное решение
Рассмотрим систему уравнений
![]() (2)
(2)
причем будем полагать, что эта система удовлетворяет условиям теоремы существования и единственности.
Совокупность n функций z1(t), ..., zn(t) называется e-приближенным решением системы (2) на
отрезке А, если каждая из этих функций непрерывна, имеет кусочно-непрерывную производную ![]() и
и
![]()
во всех точках tÎK, кроме точек разрыва непрерывности этой производной.
Пусть задана начальная точка (t0, x10, , хn0) и пусть функции fi(t, xi,...,хn) непрерывны по t в области G и удовлетворяют в этой области условию Липшица по переменным t, x1, х2, ..., хn. Можно показать, что в этом случае функции fi(t, x1,..., хn) будут непрерывны по совокупности переменных t, x1,..., хn в области G. Из непрерывности функций fi (t, x1,..., хn) в замкнутой области G следует их равномерная непрерывность. Таким образом, для любого e>0 найдется такое d>0, зависящее только от e, что при
![]()
будет справедливо неравенство
![]()
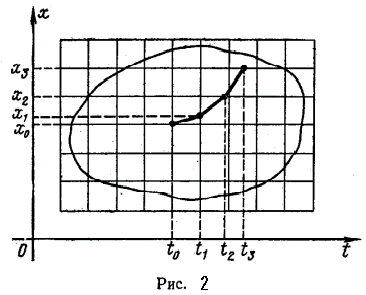
Построим e-приближенное решение системы (2). Для этого разобьем область G на кубы со сторонами, меньшими d (для случая n=1 построение проведено на рис. 2, в этом случае область разбивается на квадраты). Из точки (t, xlo, ..., хn0) проведем прямую
![]()
Эту прямую продолжим до пересечения с одной из сторон соответствующего куба. Обозначим точку пересечения (t1, x11,..., xn1). Из этой точки проведем прямую
![]()
которую продолжим до пересечения с одной из сторон куба; обозначим точку пересечения (t2, x12,..., xn2), через эту точку проводим новую прямую
![]()
и так далее.
В результате указанных действий получим ломаную xi=xi(t) (i=l, 2, ..., n), называемую ломаной Эйлера. Эта ломаная представляет собой непрерывную кусочно-линейную функцию. Ломаную Эйлера мы можем продолжить до границы области G.
Пусть xi(t) (i=l, 2, ..., n) — точное решение системы (2), удовлетворяющее начальным условиям. Обозначим через si(t) (i=1, 2, ..., n) e-приближенное решение системы (1) для тех же начальных условий. Тогда
![]()
Отсюда следует, что если |t–t0|<h, то
![]()
Таким образом, при e®0 решение xi(t) (i=1, 2, ..., n) равномерно сходится к решению si(t) (i=l, 2, ..., n) и ломаная Эйлера, исходящая из точки (t0, xi(t0)), равномерно сходится к точному решению. Это неравенство дает оценку погрешности при замене точного решения e-приближенным.
Полученные неравенства мы используем для выяснения важной зависимости решений дифференциальных уравнений от начальных условий и параметров уравнений.
2.6. Непрерывная зависимость решений от начальных условий и параметров
Пусть задана нормальная система дифференциальных уравнений (2), причем функции fi(t, xl ,..., хn) непрерывны по t и удовлетворяют условию Липшица по х1, ..., хn в некоторой области G.
Пусть далее x=x(t, t0, x0) — решение этой системы, удовлетворяющее начальным условиям. Положим, что это решение определено на отрезке |t-t0|≤h. Тогда для любого e>0 существует такое d(e, h)>0, что другое решение x=s(t, t0, z0), удовлетворяющее начальным условиям
![]()
где ||x0–z0||<d, будет определено на том же отрезке |t-t0|≤h и удовлетворяет неравенству
![]()
Рассмотрим теперь непрерывную зависимость решения системы дифференциальных уравнений от параметров. Пусть имеется система уравнений
![]()
Здесь (μ1,…, μs)=μ – вещественные параметры, а функции fi(t, x, μ) определены и непрерывны по совокупности переменных t, x1, …, xn, μ1, …, μs в некоторой области G n+s+1-мерного пространства и удовлетворяют условию Липшица по переменным x1, …, xn с постоянной L. Пусть далее x=x(t, μ’) решение этой системы при значении параметров μ=μ’, удовлетворяющее начальным условиям x(t0, μ’)=x0 и определенное на отрезке.
Тогда справедлива теорема:
Пусть x(t, μ’’) решение данной системы при значении параметров μ=μ’’, удовлетворяющее начальным условиям x(t0, μ’’)=x0. Тогда для любого e>0 существует такое d(e, h)>0, что если справедливо неравенство |μ’–μ’’|<d, то решение x(t, μ’’) определено на интервале |t—t0|≤h и удовлетворяет неравенству
|| x(t, μ’)–x(t, μ’’) ||<e.
Доказанные теоремы о непрерывной зависимости решений от начальных условий и параметров имеют принципиальное значение. Параметры дифференциальных уравнений систем автоматического регулирования (САР) задаются с некоторыми погрешностями. На основании доказанных выше теорем можно утверждать, что если погрешность в определении параметров дифференциальных уравнений САР незначительна, то решения этих уравнений с достаточной достоверностью описывают происходящие в САР процессы.
2.7. Линейные дифференциальные уравнения
2.7.1. Нормальная линейная система дифференциальных уравнений
Линейной системой дифференциальных уравнений называется такая система уравнений, в которую неизвестные функции и их производные могут входить только в первой степени.
Нормальная линейная система дифференциальных уравнений имеет вид

Введем в рассмотрение векторные функции

Тогда систему (1) можно переписать в виде
![]()
Теорема существования и единственности справедлива для линейной системы на любом отрезке [а1 ,b1]Ì(а, b), где (a, b) - интервал, на котором функции aik(t) и fi(t) непрерывны.
2.7.2. Общее решение линейной однородной системы
Система (1) называется однородной, если fi(t)º0 (i=1, 2, …, n). Однородная система в векторной форме запишется в виде
![]() (3)
(3)
Совокупность S всех решений {x(t)} образует линейное пространство размерности n, так как решения этой системы являются линейно-независимыми и образуют базис. Любой элемент этого пространства представим в виде
![]() (4)
(4)
причем постоянные c1, c2, …, cn определяются однозначно. Отсюда следует, что любое решение данной системы может быть представлено в виде (4). Поэтому выражение (4) называется общим решением системы (3). Любая система из n линейно-независимых решений системы (3), образующая базис пространства S, называется фундаментальной системой решений.
2.7.3. Определитель Вронского. Формула Лиувилля
Пусть имеется некоторая система из n векторных функций
Тогда определителем Вронского, или вронскианом, называется определитель, составленный из компонент этих векторных функций. Таким образом, определитель Вронского имеет вид
Если система векторных функций x1(t), ..., хn(t) линейно-зависима, то определитель Вронского W(t)=0.
Пусть вектор-функции x1(t), ..., xn(t) представляют собой n решений системы (3). Тогда, если определитель Вронского W(t) для этих решений обращается в ноль в какой-нибудь точке t0Î[а, b], то W(t) тождественно равен нулю на всем отрезке [а, b].
Пример: рассмотрим вектор-функции
![]()
Определитель Вронского для этих функций
![]()
При t = 0 W(0) = 0, но W(t) не равен тождественно 0. Отсюда следует, что данные вектор-функции х1(t) и x2(t) не могут быть решениями системы уравнений вида (3) с непрерывными коэффициентами, определенными на интервале, содержащем точку t=0.
Значение определителя Вронского в произвольной точке t можно вычислить с помощью рассмотренной ниже зависимости, называемой формулой Лиувилля.
Пусть x1(t), x2(t), ..., xn(t) — n решений системы (3). Тогда между значениями определителя Вронского W(t) в точках t0 и t существует следующая зависимость:
![]()
![]()
– след матрицы A(t).
2.7.4. Линейная неоднородная система. Метод вариации произвольных постоянных
Рассмотрим линейную неоднородную систему (2)
![]()
Соответствующая ей однородная система (3)
![]()
Пусть x=y(t) и j(t) – два решения системы (2). Тогда разность
x(t)= y(t)–j(t)
Представляет собой решение однородной системы (3).
Общее решение системы (2) имеет вид
![]()
где ci – произвольные постоянные; xi(t) (i=1, 2, …, n) фундаментальная система решений системы (3).
Частное решение системы (2) может быть найдено методом вариации произвольных постоянных. Рассмотрим этот метод. Пусть x1(t), x2(t), …, xn(t)— фундаментальная система решений системы (3). Частное решение неоднородной системы (2) будем искать в виде
полагая, что ci являются не постоянными, а некоторыми функциями t. Подставим это решение в систему (2):
![]()
Так как вектор-функции xi(t) – являются решениями однородной системы (3), то
![]()
поэтому
![]()
Это выражение представляет собой систему линейных алгебраических уравнений относительно сi(t) (i=l, 2, ,..., n). Определитель этой системы уравнений есть определитель Вронского для фундаментальной системы решений. Он отличен от нуля, поэтому эта система имеет единственное решение сi’(t)=Фi(t) (i=l, 2,..., n).
Интегрируем полученные равенства:
![]()
Следовательно, искомое частное решение имеет вид
![]()
Значит, общее решение неоднородной системы будет
![]()
При помощи формулы Коши можно выразить решение линейной неоднородной системы дифференциальных уравнений через некоторую фундаментальную систему решений соответствующей однородной линейной системы.
Рассмотрим неоднородную линейную систему дифференциальных уравнений (2), записанную в векторном виде
![]()
Соответствующая ей однородная система (3)
![]()
Пусть x1, x2, …, xn – фундаментальная система решения системы уравнений (3). Образуем матрицу X1(t), столбцы которой являются этими решениями:
Определитель матрицы Х1(t) представляет собой определитель Вронского. Он отличен от нуля для всех tÎ[a, b]. Следовательно, существует обратная матрица X-11(t) при каждом tÎ[а, b]. Составим матрицу
X(t, t0) = X1(t)X1-1(t0)
Столбцы этой матрицы
также образуют фундаментальную систему решений системы уравнений (3). Отметим,
что X(t, t0)=![]() Назовем
матрицу X(t, t0)
фундаментальной матрицей системы (3). Эта матрица удовлетворяет матричному
уравнению
Назовем
матрицу X(t, t0)
фундаментальной матрицей системы (3). Эта матрица удовлетворяет матричному
уравнению
![]()
Решение x(t) системы уравнений (3), удовлетворяющее начальным условиям x(t0)=x0, можно записать в виде
![]()
Тогда можно показать, что следующая формула, называемая формулой Коши, позволяет найти решение x(t) неоднородной системы (2), удовлетворяющее начальным условиям x(t0)=x0, если известна фундаментальная матрица X(t, t0) однородной системы (3):
![]()
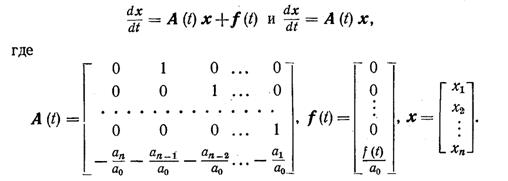
Следует отметить, что если матрица А постоянная, т. е. рассматриваемая система дифференциальных уравнений является системой линейных уравнений с постоянными коэффициентами
![]()
то решение этой системы x(t), удовлетворяющее начальным условиям x(t0)=x0, запишется в виде
![]()
где X (f) — матрица, столбцы которой состоят из фундаментальной системы решений однородной системы уравнений xt'=Ах, причем X (t0) = E.
2.7.6. Линейное уравнение n-го порядка
Линейное уравнение n-го порядка имеет вид
![]()
где a0(t), …, an(t) — непрерывные функции для tÎ(a, b), причем а0(t)¹0. Соответствующее этому уравнению однородное уравнение имеет вид
![]()
Эти уравнения путем введения вспомогательных функций
![]()
можно свести соответственно к системам уравнений

или в векторной форме,
Пусть начальные условия этой системы имеют вид
![]()
Эта система имеет единственное решение
Для нахождения частного решения ф(t) данного уравнения можно использовать метод вариации произвольных постоянных. При этом система алгебраических уравнений для нахождения сi'(t) имеет следующий вид:
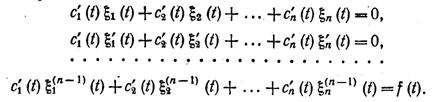
Определитель этой системы есть определитель Вронского для линейно независимой системы решений x1 ,…, xn, поэтому W(t)¹0, и данная система имеет единственное решение. Интегрируя полученные значения для c'i(t), найдем ci(t) и тогда искомое решение
Решение x(t) исходного уравнения, удовлетворяющее заданным условиям, найдется по формуле Коши
![]()
где
![]()
где ci(t) определяются из системы уравнений
Определитель этой системы представляет собой определитель Вронского фундаментальной системы решений x1, …, xn и поэтому не равен нулю. Эта система имеет единственное решение c1(t), …, cn(t). Следовательно, решение x1(t, t) определяется единственным образом.
2.7.7. Линейное однородное дифференциальное уравнение с постоянными коэффициентами
Линейное однородное дифференциальное уравнение n-го порядка с постоянными коэффициентами имеет вид
![]() (5)
(5)
Его решение будем искать в виде y=ekx. Тогда y’=kekx, y’’=k2ekx, …, y(n)=knekx. Подставим это в исходное дифференциальное уравнение и получим так называемое характеристическое уравнение для дифференциального уравнения (5):
knekx+…+a2k2ekx+a1kekx+a0ekx=0
или, разделив это уравнение на ekx, так как он ни при каких x не равен нулю, получаем:
kn+…+a2k2+a1k+a0=0
Решив это уравнение относительно k, мы получим n корней, которые могут быть как действительными, так и мнимыми. В зависимости от вида корней характеристического уравнения мы будем иметь различные виды решения дифференциального уравнения:
1. Некоторые ki, …, kj из всего множества корней характеристического уравнения действительные и различные числа. Тогда каждому km из этого множества будет соответствовать решение в виде: ym=cmekmx.
2. Некоторые ki,…, k2j – комплексные и различные. Тогда каждой паре km;m+1=am±bmi будет соответствовать решение ym=cmeamxcos(bmx); ym+1=eamxsin(bmx).
3. Среди решений характеристического уравнения есть корень ki кратности m. Ему будут соответствовать решения: yi=ciekix, yi+1=xci+1ekix, , yi+m=xm-1ci+mekix.
4.
Среди решений
характеристического уравнения есть 2 комплексных корня ki;i+1=ai±bii кратности m. Им будут соответствовать решения yi=cieaixcos(bix); yi+1=ci+1eaixsin(bix); yi+2=xci+2eaixcos(bix) ; yi+3=xci+3eaixsin(bix) ; … ; yi+m=x2m-1cieaixcos(bix); yi+m=x2m-1 ´
´ci+1eaixsin(bix).
Однако, как было сказано выше, совокупность всех решений {y(x)} образует линейное пространство размерности n, так как решения этой системы являются линейно-независимыми и образуют базис. Это значит, что линейная комбинация решений линейного дифференциального уравнения также будет являться решением. Следовательно, общее решение данного линейного однородного дифференциального уравнения n-го порядка (5) с постоянными коэффициентами можно представить как линейную комбинацию решений, соответствующих каждому корню (или паре корней) характеристического уравнения.
2.7.8. Линейное неоднородное дифференциальное уравнение
Линейное неоднородное дифференциальное уравнение имеет вид
y(n)+Pn-1(x)y(n-1)+…+P2y’+P1y+P0=f(x), (6)
где P0(x), P1(x),…, Pn-1(x), f(x) – некоторые непрерывные функции, непрерывные по x и удовлетворяющие условию Липшица по x. Соответствующее ему однородное дифференциальное уравнение имеет вид
y(n)+Pn-1(x)y(n-1)+…+P2y’+P1y+P0=0, (7).
Если дифференциальное уравнение (6) имеет частное решение yв(x) и общее решение yс=c1y1+c2y2+…+cnyn, то общее решение дифференциального уравнения (6) равно сумме частного решения yв и общего решения линейного однородного дифференциального уравнения (7) yc: y=yc+yв.
Методика нахождения общего решения линейного однородного уравнения была изложена выше. Здесь мы рассмотрим нахождение частного решения линейного неоднородного уравнения.
Частное решение будет зависеть от вида правой части f(x). В общем случае трудно найти частное решение для любой функции f(x). Однако на практике применяются следующие виды функции f(x):
1. f(x)=P(x)eax, где P(x) – некоторый многочлен. Тогда частное решение ищется в виде:
1) yч=xmQ(x)eax, если a – m-кратный корень характеристического уравнения;
2) yч=Q(x)eax, если a – не корень характеристического уравнения,
где Q(x) – многочлен той же степени, что и P(x), но с неопределенными коэффициентами.
2. f(x)=(Pn(x)cos(bx)+Lm(x)sin(bx))eax, где Pn(x) и Lm(x) некоторые многочлены. Тогда частное решение ищется в виде:
1) yч=(Mn(x)cos(bx)+Nn(x)sin(bx))eax, если (a±bi) – не корень характеристического уравнения;
2) yч=xm(Mn(x)cos(bx)+Nn(x)sin(bx))eax, если (a±bi) – m-кратный корень характеристического уравнения,
где Mn(x) и Nn(x) – многочлены, степень которых равна наивысшей степени многочленов Pn(x) и Lm(x).
После выбора вида частного решения подставляем его в исходное дифференциальное уравнение. При этом неизвестные коэффициенты полиномов находим по методу неопределенных коэффициентов, который заключается в том, что неизвестные коэффициенты ищутся из условия равенства коэффициентов при одинаковых слагаемых, например, при x, при x2, при x3cos(bx) и т. д.
3. Дифференциальные уравнения при описании непрерывных систем
3.1. Составление и линеаризация дифференциальных уравнений элементов системы
В установившемся состоянии зависимость выходной величины элемента системы от входной задается статической характеристикой элемента. Как правило, статические характеристики элементов нелинейны. Статические характеристики могут быть получены из дифференциальных уравнений элементов системы.
Пусть дифференциальное уравнение, описывающее поведение элемента, имеет вид
![]() (1)
(1)
Тогда статическая характеристика этого элемента задается уравнением в неявной форме
![]() (2)
(2)
то есть для ее получения в уравнении (1) следует положить x=const и g=const.
Если динамика элемента описывается линейным дифференциальным уравнением, то этот элемент называется линейным, если дифференциальное уравнение нелинейно, то элемент называется нелинейным. Из-за нелинейности статических характеристик уравнения элементов системы в большинстве случаев являются нелинейными.
Для упрощения анализа, когда это возможно, приближенно заменяют нелинейные дифференциальные уравнения такими линейными уравнениями, решения которых с достаточной степенью точности совпадают с решениями нелинейных уравнений. Этот процесс замены нелинейного дифференциального уравнения линейным называется линеаризацией. Обычно линеаризация нелинейного уравнения производится относительно некоторого установившегося состояния элемента системы.
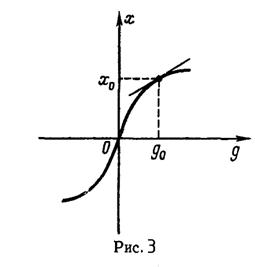
Если дифференциальное уравнение элемента нелинейно из-за нелинейности его статической характеристики, то линеаризация уравнения сводится к замене нелинейной характеристики элемента x=ф(g) некоторой линейной функцией x=ag+b. Аналитически эта замена производится с помощью разложения в ряд Тейлора функции x=y(g) в окрестности точки, соответствующей установившемуся состоянию и отбрасывания всех членов, содержащих отклонение Dg входной величины элемента в степени выше первой. Геометрически это означает замену кривой x=ф(g) касательной, проведенной к кривой в точке (х0, g0), соответствующей установившемуся состоянию работы элемента (рис. 3).
В других случаях линеаризация производится путем проведения секущей, мало отклоняющейся от функции x=ф(g) в требуемом диапазоне изменения входной величины элемента.
Назовем нелинейные статические характеристики, линеаризуемые в требуемом диапазоне изменения входной величины указанным выше способом, несущественно нелинейными характеристиками. Наряду с линеаризуемыми характеристиками имеются такие характеристики, которые не поддаются такой линеаризации. К ним относятся, например, характеристики, не разлагаемые в ряд Тейлора в окрестности точки установившегося состояния. Такие характеристики будем называть существенно нелинейными.
Рассмотрим подробнее процесс линеаризации нелинейного уравнения элемента с помощью ряда Тейлора. Пусть поведение элемента описывается нелинейным дифференциальным уравнением (1). Тогда установившееся состояние элемента характеризуется уравнением (2). Пусть g0 и х0 значения установившегося состояния. Тогда координаты g и х можно записать в виде х=х0+Dx, g=g0+Dg, где Dg и Dx — отклонения координат g и x от установившегося состояния. Уравнение (1) в отклонениях имеет вид
![]()
Разложим левую часть этого уравнения в ряд Тейлора относительно точки (0, 0, х0, g0):

В левой части этого равенства не выписаны члены, содержащие отклонения Dg и Dx и их производные в степени выше первой. Частные производные в левой части этого уравнения представляют собой некоторые числа, величины которых зависят от вида функции F(x", x', x, g) и значений координат g0 и х0.
Считая отклонения Dg, Dх от установившегося состояния, а также их производные по времени малыми и полагая, что функция F(x", x', x, g) достаточно гладкая по всем аргументам в окрестности точки, соответствующей установившемуся состоянию, отбросим в этом уравнении все члены, которые содержат отклонения Dg и Dх, а также их производные в степени выше первой. Полученное уравнение
![]()
является линейным дифференциальным уравнением с постоянными коэффициентами
![]()
Очевидно, что необходимым условием линеаризации является возможность разложения в ряд Тейлора функции F(x", x', x, g) в окрестности точки, соответствующей установившемуся состоянию. Линеаризованное уравнение приближенно заменяет нелинейное уравнение (1) лишь в некоторой малой окрестности точки (0, 0, х0, g0). Величина этой окрестности зависит от гладкости функции F(x", x', x, g) в этой точке, т. е. от величин производных порядка выше первого этой функции в точке (0, 0, х0, g0). Как правило, с помощью линеаризованного уравнения можно исследовать поведение элемента системы лишь при малых отклонениях входной и выходной координаты от установившегося состояния. Очевидно, что необходимым условием линеаризации является возможность разложения в ряд Тейлора функции F(x", x', x, g) в окрестности точки, соответствующей установившемуся состоянию. Линеаризованное уравнение приближенно заменяет нелинейное уравнение (1) лишь в некоторой малой окрестности точки (0, 0, х0, g0). Величина этой окрестности зависит от гладкости функции F(x", x', x, g) в этой точке, т. е. от величин производных порядка выше первого этой функции в точке (0, 0, х0, g0). Как правило, с помощью линеаризованного уравнения можно исследовать поведение элемента системы лишь при малых отклонениях входной и выходной координаты от установившегося состояния.
3.2. Понятие пространства состояний
С точки зрения анализа и синтеза систем представляется целесообразным разделить все переменные, характеризующие систему, на три группы:
1) входные переменные или входные воздействия mi, представляющие сигналы, генерируемые системами, внешними по отношению к исследуемой, и влияющие на поведение системы;
2) выходные переменные или переменные, характеризующие реакцию системы yj, позволяющие описать некоторые аспекты поведения системы, представляющие интерес для исследователя;
3) переменные (координаты) состояния или промежуточные переменные xk, характеризующие динамическое поведение исследуемой системы.
Величины mi, yj и xk предполагаются функциями времени. Для удобства оперирования с многомерными величинами совокупность входных переменных представим в виде вектора входа, совокупность выходных переменных в виде вектора выхода, и совокупность переменных состояния – в виде вектора состояния:
 .
.
Множество всех значений, которые может принять вектор входа m в момент t, образует пространство входа системы. Множество всех значений, которые может принять вектор выхода y в момент t, образует пространство выхода системы. Множество всех значений, которые может принять вектор состояния x в момент t, образует пространство состояний системы.
3.3. Описание непрерывных систем с помощью системы дифференциальных уравнений
В любой момент времени t состояние системы является функцией начального состояния x(t0) и вектора входа m(t0, t), то есть
где F – однозначная функция своих аргументов. Вектор выхода в момент t является также функцией x(t0) и m(t0; t) и может быть записан как
y(t)=z[x(t0); m(t0; t)].
Эти два уравнения часто называют уравнениями состояния системы. Для систем, описываемых дифференциальными уравнениями, эти уравнения могут быть записаны в следующей общей форме:
x(t)=F[x(t); m(t)],
y(t)=z[x(t); m(t)].
Такое описание системы носит название «вход–состояние–выход».
Если система описывается линейными дифференциальными уравнениями, то уравнения состояния системы сводятся к следующим:
dx(t)/dt=A(t)x(t)+D(t)m(t);
y(t)=B(t)x(t)+G(t)m(t),
где A(t) – матрица коэффициентов; D(t) – матрица управления; B(t) – матрица выхода; G(t) – матрица обхода системы.
Решение этой системы будем искать в форме
x(t)=p(t–t0)C1(t), (7)
где p(t–t0)=exp A(t–t0) – матрица перехода процесса, а С1(t) – вектор, зависящий от времени, заменяющий вектор начального состояния x0 в уравнении движения при отсутствии внешних воздействий. Дифференцируя это выражение по t, получаем
dx(t)/dt=Ax(t)+p(t–t0)dC1(t)/dt.
Если формула (7) является решением однородного уравнения, то величины в правых частях однородного уравнения и полученной формулы должны быть одинаковы. Отсюда
Dm(t)=p(t–t0)dC1(t)/dt.
Решая это уравнение относительно С1(t), получаем
Учитывая это выражение и определение матрицы перехода уравнение (7) приведем к виду
При t=t0, p(t–t0)=I и С2=x(t0). Отсюда находим

3.4. Описание систем переменными состояния
Линейная стационарная система может быть описана совокупностью линейных дифференциальных уравнений первого порядка с постоянными коэффициентами, которую можно представить в следующей векторно-матричной форме:
dv(t)/dt=Av(t),
где A – матрица коэффициентов; v(t) вектор-столбец, представляющий собой входные переменные mi и координаты xk системы
![]()
Если входные переменные рассматривать совместно с переменными состояния системы, то есть включить их в число координат системы, то вектор v можно считать вектором состояния системы увеличенной размерности.
3.5. Понятие наблюдаемости системы
Перепишем еще раз выражение для вектора выхода линейного многомерного процесса:
y(t)=Bx(t)+Gm(t), (8)
где y – p-мерный вектор, представляющий выходные переменные; B – матрица выхода размером pxn; G – матрица обхода системы размера pxr.
Пусть матрица B имеет вид
а матрица обхода G задана в виде
Тогда, развертывая формулу (8), получаем p выражений
![]() (9)
(9)
Координату состояния принято называть наблюдаемой, если она может быть определена или для нее может быть получена оценка по измеримым выходным переменным. Анализ уравнений (9) показывает, что координата xk может быть определена или для нее может быть получена оценка по измеримым выходным переменным y1, y2, …, yi, …, yp, если коэффициенты bik для i=1, 2, …, p не все равны нулю. Другими словами, xk является наблюдаемой координатой, если элементы k-го столбца матрицы выхода не все равны нулю. Если это условие не соблюдается, то координату xk называют ненаблюдаемой. Таким образом, линейный процесс является наблюдаемым, если матрица выхода B не содержит столбцов, элементы которых равны нулю.
3.6. Понятие управляемости системы
Пусть линейный многомерный процесс описывается векторным дифференциальным уравнением
dx(t)/dt=Ax(t)+Dm(t), (10)
где x – n-мерный вектор состояния; m – r-мерный вектор, представляющий управляющие воздействия; A – квадратная матрица коэффициентов n-го порядка; D – матрица управления размера nxr.
Матрица A может быть приведена к диагональной матрице (или в общем случае к жордановой форме)
где lш – собственные значения матрицы A, которые предполагаются все различными.
Применяя подстановку x=Tz, исходное уравнение запишется в канонической форме
dz(t)/dt=Lz(t)+Dm(t),
где D=T-1D=[dij]nxr.
Вектор z в полученной формуле будем называть каноническим вектором состояния. Будем считать, что в предыдущих матричных выражениях собственные значения li расположены в порядке возрастания их модулей, комплексные li – в порядке возрастания их аргументов, векторы-столбцы матрицы T – нормализованы, то есть выбраны так, что евклидова длина их равна единице.
Запишем полученное выражение в развернутой форме, то есть в виде системы дифференциальных уравнений первого порядка:
![]()
Эти уравнения показывают, что управляющее воздействие mk не будет оказывать какого-нибудь влияния на движение по координате zj, если
![]()
то есть когда djk=0 для k=1, 2, …, r. Запись в такой форме означает, что все элементы j-й строки матрицы D все равны нулю. Отсюда следует вывод, что неуправляемыми координатами системы являются все те канонические координаты, которые соответствуют нулевым строкам матрицы D. Равенство нулю всех элементов этих строк матрицы D делает невозможным управление по соответствующим координатам. Это означает также, что изменение координат происходит независимо от управляющих воздействий и, следовательно, целиком определяется начальными условиями и возмущениями. Можно сказать, что эти координаты развязаны от управления.
Приведенное рассмотрение позволяет дать следующее определение управляемости: процесс, описываемый уравнением (10), является полностью управляемым, если матрица D не содержит строк, элементы которых равны нулю; координаты, соответствующие ненулевым строкам D, считаются управляемыми.
3.7. Описание непрерывных систем с помощью одного дифференциального уравнения
Непрерывную систему часто описывают дифференциальным уравнением относительно ее выхода y(t) и входа r(t):
![]()
или, вводя оператор дифференцирования p=d/dt,
![]()
Здесь мы ввели функцию F(t)=B(p)v(t), потому что, как правило, входное воздействие на систему известно. Такая система называется системой «вход–выход».
Многочлен A(p) называется собственным оператором системы, а M(p) – входным оператором.
Введем понятие передаточной функции системы. Отношение входного оператора М(р) к собственному оператору D(р) назовем передаточной функцией W(р) системы, описываемого линейным дифференциальным уравнением с постоянными коэффициентами
![]()
Решение этой системы совершенно аналогично решению линейного неоднородного дифференциального уравнения с постоянными коэффициентами.
3.8. Переход от системы дифференциальных уравнений к одному уравнению
Введем оператор дифференцирования Lij=anijpn+a(n-1)ijpn-1+…+a1ijp1+a0ij. Тогда любую систему дифференциальных уравнений (в том числе и систему уравнений, описывающих систему «вход–состояние–выход») можно представить в виде
Так как операторы Lij зависят только от p, то решение можно получить, используя формулы Крамера:
![]()
где D(p) дифференциальный оператор, определяемый определителем:
![]() – оператор, определяемый ki-ым алгебраическим дополнением.
– оператор, определяемый ki-ым алгебраическим дополнением.
3.9. Переход от одного уравнения к системе дифференциальных уравнений
Пусть дана линейная система с постоянными параметрами, одним входом и выходом:
![]()
где p=d/dt. Непосредственно из схемы моделирования следует
 (11)
(11)
Дифференцируя y, получим
![]()
Последующая подстановка px1 из полученных уравнений дает
![]()
Согласно приводимой процедуре вторая и старшие производные y равны

Подставив полученные выражения для y, py, …, pn-1y и выражения (11) в исходное уравнение и сопоставляя с выражением для pny, получим выражения для ai и bi:
bi , по-видимому, можно также записать в виде
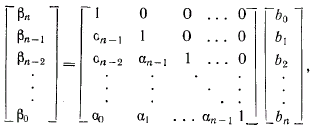
Значит, bi можно определить, умножив обе части этого выражения на обратную матрицу коэффициентов. Согласно полученным выражениям, одна из форм матриц A, B, C, D для системы вида «вход–состояние–выход» имеет вид
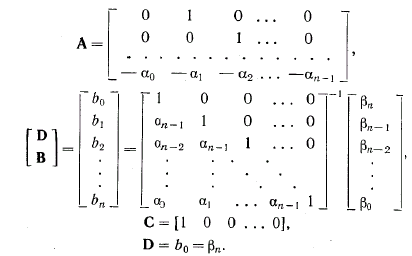
Приведенные уравнения состояния соответствуют так называемому стандартному виду системы.
1. Чемоданов Б К. Математические основы теории систем.
2. Ю. Ту. Современная теория управления.
© 2010 Интернет База Рефератов